双臂机械手在背光源设备中的设计应用
2013-09-17 01:49:28郭晓蕾
电子工业专用设备 2013年10期
王 淳,郭晓蕾
(太原风华信息装备股份有限公司,山西太原 030024)
双臂机械手在背光源设备中的设计应用
王 淳,郭晓蕾
(太原风华信息装备股份有限公司,山西太原 030024)
通过对生产工艺的研究,针对设备的高精度,高效率,运行平稳的要求,提出了机械手臂合二为一的工作模式。减少了动作重复,提高了运行效率。
背光源;机械手臂;效率
近年来由于液晶显示器产业的迅猛发展,LCD产品不断进步,市场不断扩大。由于LCD本身是非发光性的显示装置,必须通过背光源才能达到显示效果,因此背光源性能的好坏直接影响LCD显示品质。人们在关注其生产工艺技术的同时,也越来越关注LED关键设备的研发和改进。背光源产业属于劳动密集型组装产业,耗工耗时,加之近年来中国台湾地区、日本、韩国主要背光源模块厂商,都不断在我国内设厂,产业竞争日益激烈,保证品质的同时还要提高生产效率成为了众生产厂商发展的瓶颈。因此,在自动BLU叠合机的研发中,机械手臂的运送效率是设计的核心环节。
1 背光源生产工艺介绍
背光源模块主要由光源、导光板组成的半成品以及扩散膜、增光膜和遮光膜组成(如图1所示)。组装时将各种膜放置在半成品内压合而成,为了达到一定的显示品质,各层膜片叠放时务必达到一定的精确度。因此,人工生产无法保证叠放的一致性,导致了产品良莠不齐。

图1 背光单元结构示意图
2 机械手臂的设计
机械手臂的作用是将从保护膜中自动剥离出来的各种膜片从送料平台上取放在定位平台,再从定位平台取放到半成品内,整个工艺流程需要机械手臂完成10个直线动作。通过对生产工艺的研究以及对设备的整体配置的优化,机械手臂的设计主要有3点要求:取放膜片速度快;取放膜片的精度高;运行稳定。
为提高运送效率,提出了两个步骤同时进行的动作方案,需要两个机械手臂完成以下动作(如图2)。手臂1通过动作1~5将膜片从料平台运送到定位平台,完成运送后回到原点进行下一次的运送。手臂2继续手臂1的工作将定好位的膜片通过动作(6)~(10)从定位平台运送到半成品内,完成运送后回到原点继续手臂1的运送。
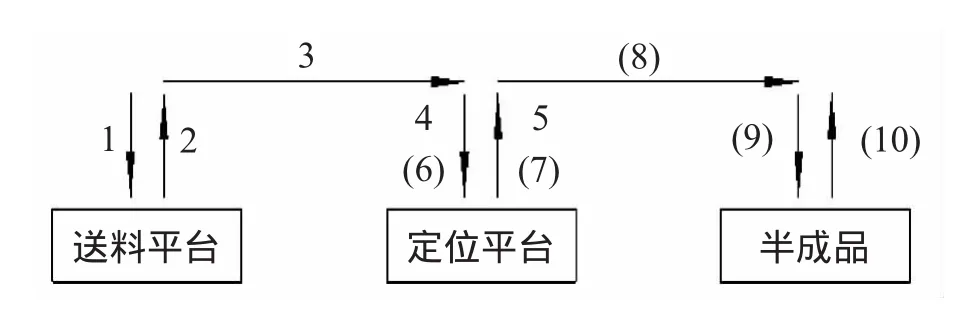
图2 单一臂膜片取放流程
该方案可以高效率的完成整个工艺流程,但由于设备的空间设计较为紧凑,以及对成本的控制,对此方案进行了新一轮的优化,将两个独立运行的手臂结合为一体控制,提出了双臂机械手的新设计(如图3)。此次优化将成本降低为原先的一半,并将整个运送时间缩短了1/2。

图3 双臂膜片取放流程
机械臂X向运动装置(如图4)由原先只带动一个机械臂转为同时带动两个机械臂,这对动力装置提出了更高的要求,为保证产品精度以及良品率,设计时采用了伺服电机控制高精度丝杆运动作为机械手臂运行的主要方式,通过司服电机的带动,最大运行速度为800 mm/s,进一步提高了生产效率。
伺服电机的最高使用转速为:1 500 r/min
额定转速为:3 000 r/min
摩擦扭矩为:T1=(Fa·Ph/2π·η)·A
式中:Fa——轴向负荷
Ph——滚珠丝杠的导程
η——滚珠丝杠的效率(0.9~0.95)
A——减速比
惯性力矩:每单位长的丝杆轴惯性扭矩为1.23×10-3kg·cm2/mm,则丝杆轴全长500 mm的惯性力矩为:

角加速度 ω'=(2π·Nm)/(60t1)
式中:Nm——电动机每分钟转速
t1——加速时间
则扭矩为TK=T1+T2
故伺服电机瞬间最大扭矩必须大于TK。选择电机满足条件。
由于取放膜片的速度快,精度要求高,两个手臂Y向运动时不能出现抖动,倾斜或动作生硬的现象,故对手臂的Y向运动气缸进行受力分析,(如图5)。负载安装在气缸的端板上,机械臂外伸,负载集中看作为向下的力F。
运动速度为:Va=300 mm/s,集中负载质量为W=3.2 kg,外伸量为Ln=120 mm,故:集中负载质量为:
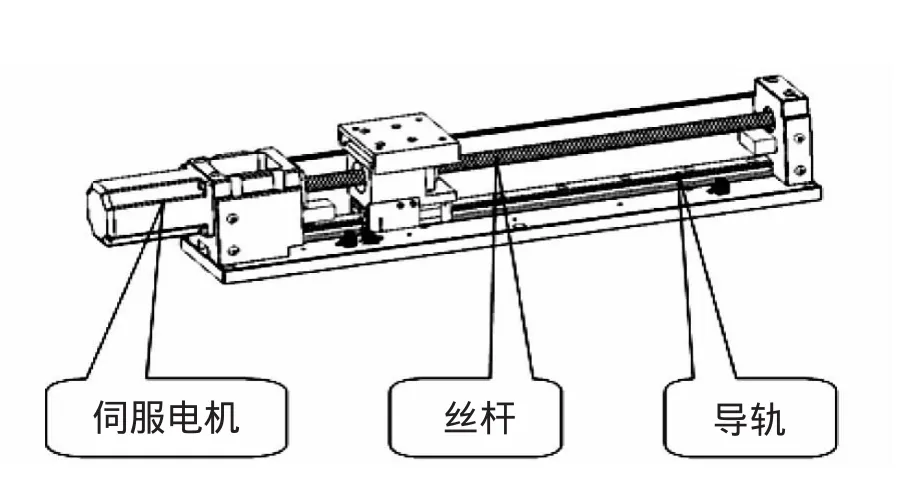
图4 机械臂X向运动装置
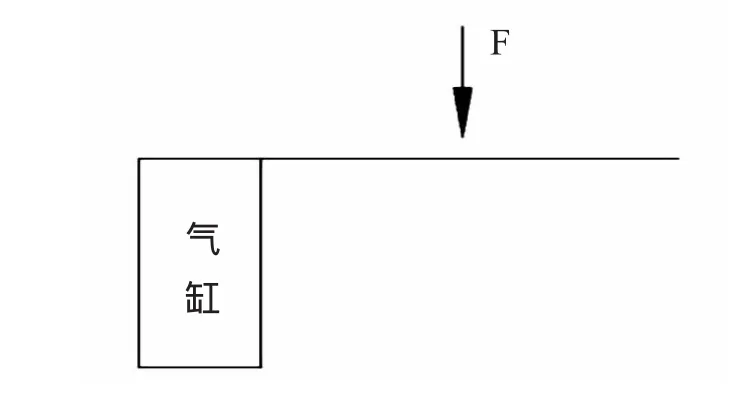
图5 气缸受力示意图

式中:K——工件安装系数
β——允许集中负载质量系列
Wmax——最大允许集中负载质量集中负载质量的负载率为α1=W/Wa静态力矩为:

式中:An——力矩中心位置距离修正值
静态力矩的负载率为α2=M/Ma
动态力矩为:

动态力矩的负载率为α3=Me/Mea
计算得 αn=α1+α2+α3≤1,满足使用要求。
3 结 论
本文主要介绍了背光源设备中机械手臂的设计过程,通过对产品工艺的深入研究,将影响设备生产效率的核心部件进行整合设计,将两个机械手臂整合为一体控制,丝杆采用精密滚珠丝杆,导轨采用LM滚动导轨。(如图6)
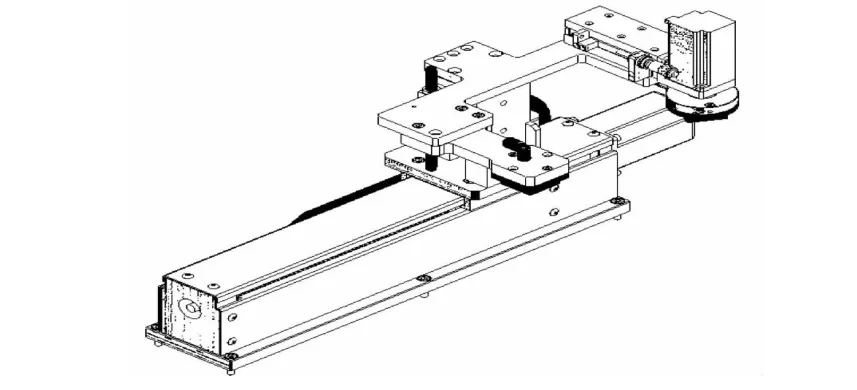
图6 双臂机械手
稳定高精度的运行使得产品定位精度高,减少机械手臂数量,降低了成本,并使得生产效率大大提高,满足了客户的需求。
:
[1]张俊清.背光源自动帖片机送料机构创新设计[J].现代显示,2011(10):25-27.
[2]高艳.背光源膜片吸取装置的设计[J].电子工业专用设备,2013(2-3):58-60.
[3]靳建鼎.电子专用设备的人性化设计[J].电子工艺技术,2008,29(3):160-163.
Design of Double-Kinematics Robot in Backlight Equipment
WANG Chun
(Taiyuan Fenghua Information-equipment CO.,LTd.,Taiyuan 030024,China)
Abstract:Focusing on the design requirements of equipment about high precision,efficiency and running stability,we designed double-kinematics work pattern,by analyzing the production process.The result show this design successful reduces repeating actions,improves production efficiency.
Keywords:Backlight;kinematics Robot;efficiency
TH132
B
1004-4507(2013)10-0047-03
2013-09-23
王淳(1986-),女,山西太原人,大学本科,就职于太原风华信息装备股份有限公司,现从事电子专用设备的研制与开发,
猜你喜欢
中国设备工程(2024年9期)2024-05-13 06:05:08
橡塑技术与装备(2022年10期)2022-10-03 07:39:14
煤气与热力(2021年10期)2021-12-02 05:11:48
装备制造技术(2021年5期)2021-08-14 01:44:44
橡塑技术与装备(2021年2期)2021-02-01 03:36:18
电子制作(2019年12期)2019-07-16 08:45:44
航天制造技术(2018年3期)2018-07-07 02:03:18
电子制作(2017年14期)2017-12-18 07:07:55
电子测试(2017年16期)2017-09-23 01:38:25
光学精密工程(2016年5期)2016-11-07 09:06:02