一种新型锁紧装置在高机动雷达中的应用*
2013-09-16 03:25:09岳振兴
电子机械工程 2013年3期
岳振兴
(南京电子技术研究所, 江苏 南京 210039)
一种新型锁紧装置在高机动雷达中的应用*
岳振兴
(南京电子技术研究所, 江苏 南京 210039)
介绍了一种新型锁紧装置的结构和工作原理,对影响该装置性能的关键参数进行了详细分析。该装置借助压簧的恢复力保持锁紧状态稳定,借助双扭簧的恢复力矩保持解锁状态稳定。通过样机试验验证了该锁紧装置自锁性能稳定可靠,最后给出了一个典型应用实例。该锁紧装置可广泛应用于现代地面高机动雷达,有效提高雷达的自动架设和撤收性能,是提高雷达机动性能的重要手段。
自动锁紧装置;自动架撤;高机动;雷达
引 言
在现代高技术条件下,特别是局部战争对雷达机动性提出了高要求,高机动性是提高地面雷达战场生存能力的重要技战术指标[1],而雷达是否能够在最短的时间内完成可靠架设和撤收则是提高雷达机动性的重要手段[2]。对于依靠机构进行架设和撤收的雷达结构系统,对运动到位的机构部件进行快速可靠地锁固是雷达机构设计的关键之一[3]。目前,实现上述锁固功能的常用方法多为通过电机或液压油缸驱动插销插入或拔出销孔的插销方式,这种方法:(1)锁固时插销轴与销孔需要精确对齐,完成锁固一般需要独立的动作控制环节,占用系统架撤时间,降低了雷达的机动性能;(2)尽管可以采用圆锥面配合的方式降低插销轴与销孔的对齐精度要求,但是插销轴与销孔装配精度难以保证,常发生插销轴与销孔之间卡滞而锁紧不到位,导致插销轴与销孔之间存在预应力,影响天线的正常架设和撤收。此外,也有通过执行机构的驱动构件自身具备的自锁功能实现机构架撤状态稳定,如文献[4]采用具有自锁功能的双螺旋丝杆机构作为天线的翻转结构。本文介绍一种通过液压驱动而自动解锁、随动锁紧的新型锁紧装置,有效实现机构到位后快速、可靠锁固和解锁。
1 工作原理
该锁紧装置主要由单向油缸基体、锁钩、卡钩、压簧、双扭簧等组成,结构参见图1。
机构部件运动到终点位置时,通过与机构部件刚性连接的锁杆,压迫锁钩,克服双扭簧的恢复力矩,将锁紧装置由解锁状态转化为锁紧状态,在达到锁紧状态的瞬间,卸压后的油缸内的压簧在恢复力作用下使油缸杆迅速缩回,拉动卡钩锁紧锁钩,从而实现对运动部件锁固。运动部件需要解锁时,由外部液压力推动油缸杆,克服内部压簧恢复力而伸出,使卡钩对锁钩解锁,此时运动部件上的锁杆可以脱离锁紧装置,实现解锁。锁钩在双扭簧恢复力矩的作用下转动至行程终端,受到销轴限位而始终保持张开状态,为下一次锁紧动作准备。
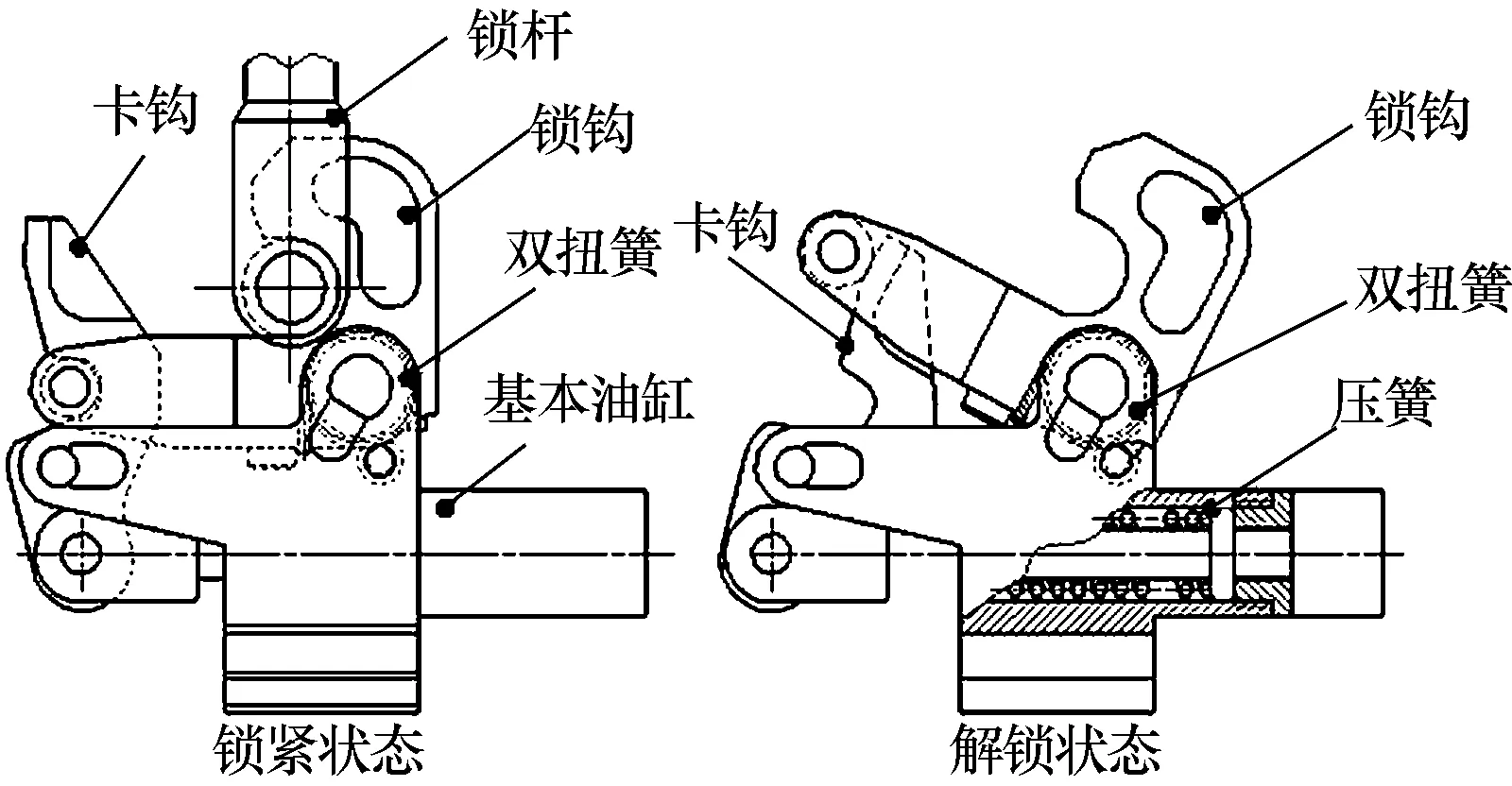
图1 锁紧装置结构组成
2 结构实现
锁紧装置的功能主要取决于3个因素:结构自锁性、压簧的恢复力和双扭簧的扭转力矩。
2.1 结构自锁条件
2.1.1 锁紧接触副的结构
卡钩与锁钩的接触部位在机构锁紧时所处的接触状态是决定锁紧装置自锁性的关键。图2为锁紧装置处于锁紧状态时,卡钩与锁钩接触副的状态。图中O为卡钩转动中心,O1为锁钩上被锁柱面中心,r为被锁柱面半径,R为以O为中心与被锁柱面相切的轮廓半径,R=OO1+r,A表示锁钩的接触圆柱面,B、C、D分别表示卡钩上锁紧锁钩(A面)的接触面的不同结构形式,B为与半径R的圆弧相切且与OO1垂直的凹槽接触轮廓,C、D为改进接触力方向的凹槽接触轮廓,PB、PC、PD分别表示对应B、C、D结构形式的接触副对锁钩作用力矢量。方案a中O1与O位于同一水平坐标位置,方案b中的O位于O1的偏左位置。

图2 锁紧状态的接触副简图
根据图2分析,锁紧装置可靠锁紧必须满足2个必要条件:
1)卡钩能够顺利绕O轴转动,使卡槽可靠地卡住锁钩柱面。这要求卡钩与锁钩接触的卡槽接触面必须位于R圆弧面的外部,否则卡钩转动时卡槽将会与锁钩柱面干涉而不能锁紧到位。
2)卡槽与锁钩柱面接触副上的受力状态具有可靠自锁性。
锁紧装置在锁紧状态下受到图2中外载荷F1和F2作用,分别对锁钩和卡钩取分离体进行力平衡分析,见图3。
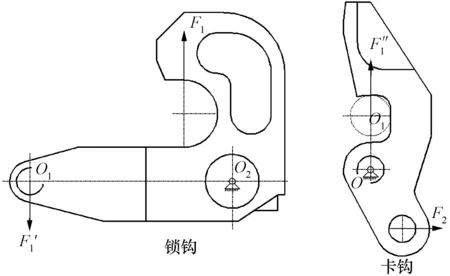
图3 分离体力平衡分析
图中F1′和F1″互为作用力与反作用力,F1′方向与接触副的结构形式有关,对应图2中的PB、PC和PD。当F1″取-PB方向时,对卡钩O点的扭矩为零,满足自锁要求,在压簧恢复力F2作用下,卡槽锁紧柱面的状态始终保持稳定;当F1″取-PC和-PD方向时,F1″对卡钩产生一个同F2作用一致的转矩,从而加强了锁紧效果,更有利自锁。对于C、D这两种凹槽接触轮廓,在自锁功能得到增强的同时,也对系统带来了不利影响,主要有以下表现:
1)自锁功能的增强是以产生间隙为代价的;
2)由于存在锁紧间隙,锁钩在外载荷F1作用下绕其转轴O2转过微小角度,使锁钩柱面A与卡钩凹槽的C或D轮廓面充分贴紧接触,在这一状态下解锁锁紧装置时,会发生卡钩凹槽轮廓与锁钩柱面干涉,不利于解锁。所以结构设计时优先选择方案a或b中B形式的卡钩凹槽轮廓。
2.1.2 接触副的摩擦力和装配误差对自锁性的影响
锁紧装置加工装配中总不可避免地存在各种误差,累积误差可能导致O1位于O的偏左位置,出现图4所示的受力状态。对卡钩取分离体进行力平衡分析,卡钩同时受到F1″、N和F2作用,以绕O点逆时针方向为正值对O点取力矩:
T=F2L1+N(L2+r)-F1″x
(1)
式中:x为累积误差的偏置距离;N为接触副上由于正压力F1″作用而产生的摩擦力
N=F1″f
(2)
式中,f为钢-钢滚动摩擦系数。
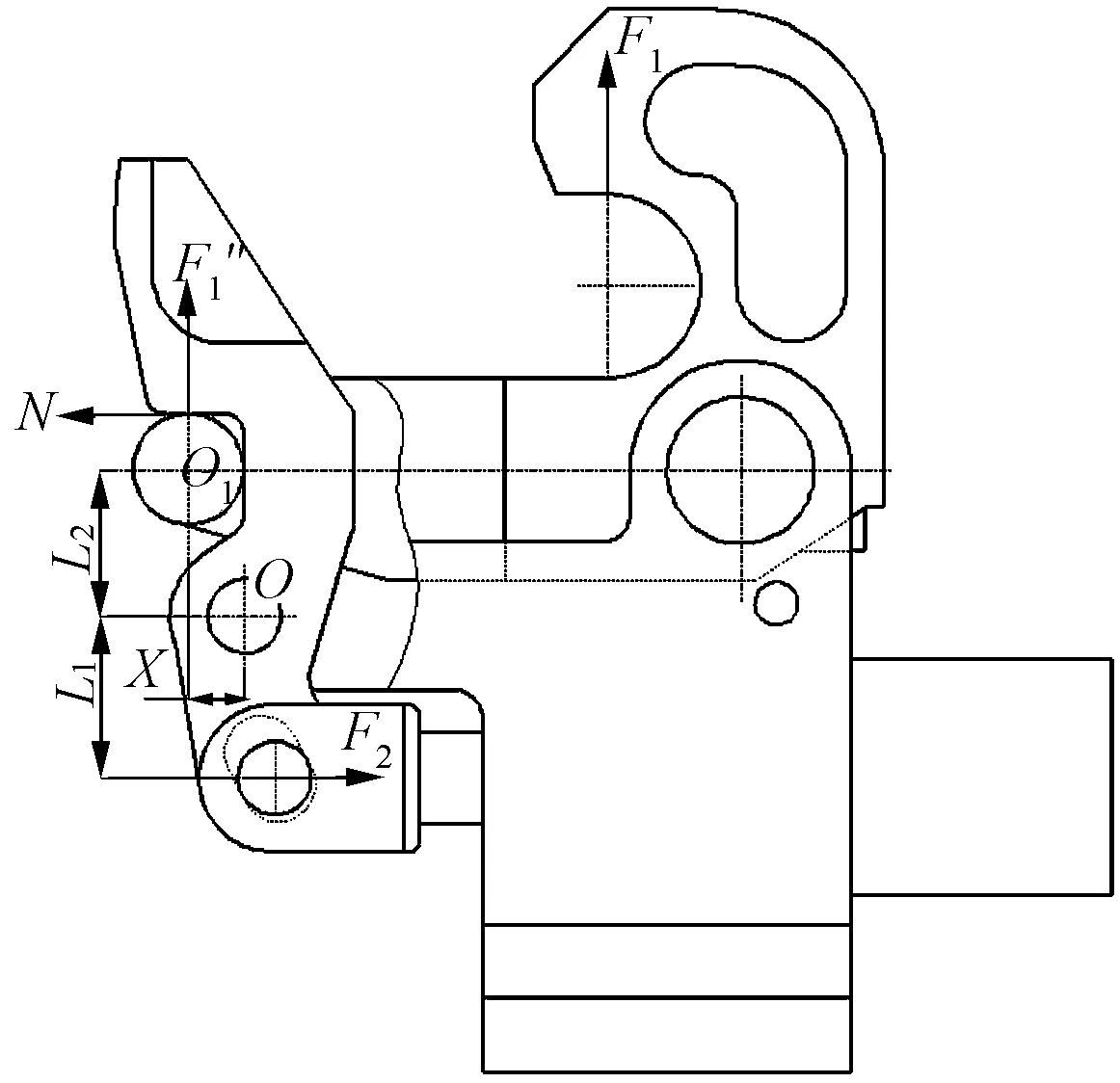
图4 装配误差原理分析
要保证结构可靠自锁,必须保证T>0,需满足:
(3)
当不考虑F2作用,仅依靠接触副上的摩擦力实现自锁时,需满足:

(4)
将式(2)代入式(4),化简得到:
x (5) 式(5)表示完全通过锁紧接触副上的摩擦力实现机构自锁的装配误差要求。 2.2 压簧恢复力确定 设置在基体油缸内的压簧使卡钩始终具有绕O轴逆时针转动的张力,确保锁紧装置能随动锁紧且保持锁紧状态稳定。压簧的性能参数主要有2个: 1)保持锁紧状态稳定所需的初始安装恢复力F0; 2)保证锁紧装置完全解锁的最大恢复力Fm。 (1)初始恢复力F0 压簧初始恢复力由式(6)确定: F0=Kx0 (6) 式中:K为压簧刚度;x0为压簧安装状态时的压缩量。 为了确保卡钩能够克服锁紧装置中影响卡钩逆时针转动的各种阻力,使卡钩完全锁紧到位,压簧初始恢复力应满足: (7) 式中:Ni为影响卡钩逆时针转动的各种阻力,主要包括:油缸中有杆腔和无杆腔之间的压差阻力N1、油缸活塞与油缸筒之间的摩擦阻力N2、油缸杆与基体油缸密封圈之间的摩擦阻力N3、油缸杆与卡钩配合连接部位的摩擦阻力N4、卡钩绕O轴转动的摩擦阻力N5。 (2)最大恢复力Fm 最大恢复力决定了液压回路中的最小解锁压力,是液压回路中设置顺序阀门限值的重要参数,由式(8)确定: Fm=F0+KΔ (8) 式中:Δ为锁紧装置完全解锁时的油缸杆行程。 2.3 双扭簧恢复力矩确定 双扭簧最小恢复力矩由式(9)确定: T0=Kα0 (9) 式中:K为扭簧扭转刚度;α0为扭簧安装状态时的扭转压缩角。 为了保证卡钩解锁后,双扭簧能够保持锁钩的解锁姿态稳定,双扭簧最小恢复力矩应满足: (10) 式中:T1为锁钩绕O2轴转动的重心力矩;T2为锁钩绕O2轴转动需要克服的摩擦力矩。 以地面情报雷达中常见的2 t锁紧载荷为输入要求,设计了一种锁紧装置并对其锁紧和解锁性能进行了试验。图5为锁紧装置在试验台上进行自锁性能试验,在极限拉力5 t的条件下锁固状态非常稳定;在锁杆触发锁钩到锁紧状态的瞬间,锁紧装置完成锁固时间不超过1 s。 图5 锁紧装置自锁性能试验 由于该锁紧装置解锁需要液压驱动,所以非常适合用于依靠液压驱动机构进行架设和撤收且有顺序动作要求的机动性雷达。某型号雷达,天线阵面总重10.5 t,系统架设时间≤160 s,撤收时间≤140 s,阵面架撤由4套主机构组成,各主机构动作到位后均需要可靠锁固,各机构架撤动作均由液压驱动的油缸完成且各动作有严格的先后顺序要求。该装备在机构系统设计中,总计利用了16套锁紧装置对4套主机构实现可靠锁固,实现了整套架撤动作在指标时间内完成“一键式”自动架撤。图6为其中的边块阵面展收液压回路,根据压簧最大恢复力设定顺序阀的门限压力大于10 MPa,在液压油进入主执行机构油缸前,受到顺序阀门限压力的限制而提前将锁紧装置解锁,在解锁完成的瞬间油压快速升高,然后打开顺序阀进入执行油缸而驱动主机构动作。该锁紧装置随雷达转运国内执行多项任务,行程超过1万公里,经过长达5年的各种使用工况及环境条件考验,性能非常可靠。 图6 边块阵面展收液压回路 该锁紧装置是提高地面雷达机动性能的有效手段,具有如下优点: 1)锁固动作简单,随动快,解锁和锁紧过程均不到1 s,能够适应各种液压驱动的顺序锁固场合,可以极大地缩短雷达架撤时间。 2)利用压簧的恢复力保持锁紧状态稳定,利用双扭簧的恢复力矩保持解锁状态稳定,具有锁固可靠和状态稳定的特点。 3)可扩展性强,根据被锁固部件所受外载荷大小的不同,可以开发出不同承载能力的系列化产品,方便选用。 4)可改良性强,可以将基体改造成电磁驱动或纯机械驱动,从而适应电机驱动或手动驱动解锁。 [1] 林有才. 高机动性地面雷达的现状和未来发展趋势[J]. 电子科学技术评论, 2004(6): 35-38. [2] 赵德昌. 地面高机动雷达结构总体设计探讨[J]. 电子机械工程, 2007, 23(3): 19-23. [3] 胡长明, 罗超人. 从结构总体设计角度探讨提高地面雷达机动性的方法[J]. 电子机械工程, 1999(5): 11-14. [4] 张增太. 机动式雷达自动架撤系统的结构设计[J]. 雷达科学与技术, 2004, 2(6): 345-348. 岳振兴(1976-),男,高级工程师,主要从事地面雷达总体结构研究与设计工作。 Applicaiton of a New Auto-lock Mechanism to Fast-mobile Radar YUE Zhen-xing (NanjingResearchInstituteofElectronicsTechnology,Nanjing210039,China) This paper presents the structure and principle of a new lock mechanism and analyzes the key structure parameters affecting the performance of the new lock mechanism. Stability of lock state are maintained by the resilience of compression spring, stability of unlock state are maintained by the resilience moment of double torsion spring. Prototype test demonstrates that the auto-lock performance of the lock mechanism is stable and reliable. Finally, a typical application instance is given. This lock mechanism can be widely used in modern fast-mobile ground radars to effectively enhance the performance of automatic up and down. It is an important method for improving radar maneuverability. auto-lock mechanism; automatic up and down; fast-mobile; radar 2012-11-26 TH112;TN957.8 A 1008-5300(2013)03-0029-04

3 样机及应用
4 结束语
猜你喜欢
电镀与涂饰(2022年9期)2022-06-09 03:06:50
电子乐园·中旬刊(2021年4期)2021-03-07 09:19:07
现代计算机(2019年11期)2019-05-27 01:18:58
邵阳学院学报(自然科学版)(2019年3期)2019-05-04 04:12:48
制造技术与机床(2018年10期)2018-10-13 06:36:48
灾害学(2018年2期)2018-04-12 06:08:42
电脑与电信(2018年11期)2018-02-16 05:41:16
重庆理工大学学报(自然科学)(2017年6期)2017-07-06 11:03:23
西安建筑科技大学学报(自然科学版)(2014年5期)2014-11-10 02:34:30
西安建筑科技大学学报(自然科学版)(2014年5期)2014-11-10 02:34:30