
反潜直升机搜潜效能分析
2013-09-15 05:13崔翰明
直升机技术 2013年3期
崔翰明
(海军驻景德镇地区航空军事代表室,江西景德镇 333001)
0 引言
反潜战在各国海军海上作战中具有十分重要的作用,尤其是随着潜艇朝高速、深潜和低噪声方向发展,反潜作战变得更加困难和复杂。在各种反潜手段中,直升机反潜因具有速度快、效率高,受潜艇威胁小的优点,受到了世界各国海军的重视。目前,世界上最具有代表性的反潜直升机有美国的SH-60B“海鹰”、俄罗斯海军的卡-27/28“蜗牛”、欧洲的 NH90 等[1]。
针对反潜作战而言,搜潜装备的搜潜效能是表示反潜兵力在特定的战术背景和作战对象等约束条件下,完成搜索发现潜艇目标任务程度的度量。搜潜效能评估是通过定量计算,分析预测反潜直升机运用各种搜索手段完成巡逻搜索任务的程度,目的是提高搜索手段综合运用的效率,为指挥员提供战术使用的决策依据。
本文结合反潜直升机所搭载的反潜搜索电子设备,在详细分析雷达、红外前视仪、声纳浮标、磁探仪和电子支援系统等设备搜索效能的基础上,以具体的作战过程为基础,针对应召和巡逻两种典型搜潜方式进行了典型组合搜潜方案的效能分析,最后通过仿真分析验证了方法的合理性与可行性。
1 反潜直升机搜潜设备性能分析
反潜兵力对潜艇的搜索任务主要包括:在指定海域或航道上对潜艇的搜索,在舰艇编队周围实施反潜警戒,在其它兵力发现潜艇的初始位置搜索以及与其它兵力协同搜索等。无论是执行应召反潜还是巡逻反潜任务,航空反潜的基本过程是搜索、探测、识别、定位、跟踪和攻击。执行反潜作战任务时,反潜直升机在空中飞行,而目标处于海水介质中,潜艇具有很强的隐蔽性,反潜直升机在作战海域上空飞行的大部分时间都是用于搜索和探测,因此搜索是航空反潜行动的重要一环。
现代反潜直升机一般装有雷达、红外前视仪、声纳浮标、磁探仪等搜索设备。由于潜艇的特点,声纳浮标成为搜潜最主要的设备和手段。
潜艇的主要航行状态包括水面航行状态、半潜航行状、潜望深度航行状态以及工作深度航行状态。反潜主要针对潜望深度航行状态以及工作深度航行状态。
1.1 反潜雷达搜索能力
使用雷达进行反潜搜索时,针对潜望深度航行状态,雷达用于潜望镜和通气管基本上呈圆柱状的简单目标,目标的反射面积可以假定为常数,恒虚警下目标的检测概率和雷达回波信号的信噪比关系为[2]:

而雷达探测距离与信噪比之间的关系为:

其中:SNR—信噪比;C—雷达性能参数,对确定的某型雷达为常数;σ—目标反射面积;Pd—检测概率;Pf—虚警概率,一般为常数。
对于运动潜艇的雷达发现概率为:

式中:PR为雷达发现敌潜艇的概率;S0为雷达进行系统搜索的面积;S为可能存在敌方潜艇的海域面积:D0为雷达发现潜艇艇体、通气管、潜望镜的距离:Vf为雷达搜索时的飞行速度;T为雷达搜索时间。
上述方法同样适用于电子支援系统的搜索概率分析,不同之处在于电子支援系统和雷达对于进入作用距离之内的目标,其信噪比改善不同,从而导致目标被发现的概率不同。
1.2 红外前视仪(可见光)反潜搜索能力
红外前视仪可以通过探测潜艇艇体、通气管、潜望镜等进行反潜搜索。远距离时,这些潜艇的特征在红外前视仪图像中表现为一个点状目标信息。因此可以采用点目标的相关方法进行反潜搜索能力的研究。
通常用假设H1代表目标存在的情况,用假设H0代表目标不存在的情况,设z为单帧图像的一个观测值。假设图像的背景噪声为高斯白噪声,则二元假设可描述为:

式中:m1为目标信号幅值与背景噪声均值之和,m0为背景噪声的均值。η是均值为0、标准差为σ的高斯分布白噪声。单帧观测图像中每个像素点的概率密度函数为:
根据信号检测理论,平稳正态噪声条件下,单帧检测门限为t时,单帧检测概率Pd和单帧虚警概率Pf分别为:
其中:u和σ分别为噪声的均值和标准差,SNR为信噪比。Φ(·)为标准正态分布函数。而单帧检测概率、单帧虚警概率和信噪比之间的关系为:

在典型环境条件下,红外探测距离与图像信噪比之间存在如下关系[3]:

其中:C(t)—目标光谱辐射功率;a—大气衰减系数;β—系统增益。红外光谱测距由于系统增益和大气衰减系统在不同的天气情况下为非常数,因此距离直接估算的精度较低,而激光辅助测距则是目前常用的手段。
当红外前视仪相对目标距离比较近的时候,目标呈现形状信息,可以采用面目标识别概率进行潜艇目标的反潜搜索能力描述。实际情况是,当反潜直升机接近潜艇时,潜艇将潜入水下,面目标识别的情况比较少。
1.3 磁探仪反潜搜索能力
我国领海大部分为浅海区,浅海不利的声环境对探测安静型潜艇的声纳浮标提出了严峻的挑战。但浑浊海水不影响氦光泵磁探仪的探测灵敏度,采用磁探仪探测安静型潜艇是一种有效的方法。当潜艇出现时,潜艇自身的磁异常将引起地磁场的扰动,通过检测这种微弱的磁异常扰动可以对潜艇进行检测和监视[4]。
反潜直升机在H(km)高度飞行,潜艇在h(km)深度航行时,磁探仪的搜索宽度为:

其中:dcty(km)—磁探仪发现潜艇的距离。磁探仪搜索效率为:

其中:psb为磁探仪识别潜艇概率;vm—潜艇速度;vfj—反潜直升机搜索速度。
则应召搜索发现概率为:

其中:n—反潜机数量;tss—搜索时间;Syz—应召搜索海区面积。
巡逻搜索发现概率为:
其中:L(km)为巡逻线长度,且潜艇航向垂直于巡逻线方向。
1.4 声纳浮标搜索能力
直升机使用声纳进行离散搜索,放下声纳天线和起飞更换地方依次替换进行。离散搜索一个循环包括放下天线、搜索、收起天线和飞向下一地点。

tz—离散搜索一个周期所用时间;tf—放下天线所用时间;ts—搜索时间;tn—收起天线所用时间;th—飞向下一地点所用时间。

直升机每次悬停的搜索面积为:其中:dB—直升机声纳的作用距离。

在这个区域内保证发现潜艇的概率等于接触概率。因此,一架直升机的搜索效率为:

其中:Pk—接触概率。
而直升机群的搜索效率为:

1.5 无线电声纳浮标搜索效率
当浮标运行正常时,进入浮标作用区的潜艇被发现的概率等于接触概率。而浮标的覆盖范围则是增大发现的可能性,针对应召搜索的海域Syz,则潜艇进入浮标作用区域的可能性为:其中:Nσ—浮标数量;S0—单个浮标的作用面积;vσ—浮标的速度;tσ—值班时浮标工作的持续时问(或监视持续的时间)。

整体搜索效率为:

2 反潜直升机搜潜的效能分析模型
2.1 搜潜效能评估指标的选取
装备效能是在规定的条件下达到预期目标的能力,是装备达到其任务目标程度的一种度量。所选择的指标应该能够反映武器系统实际性能可达到的程度,能够通过比较指标大小判定系统之间效能的高低。其次,所选择的效能指标应该是系统效能的增函数,也就是说指标越大,系统效能越高。同时还应该遵循敏感性原则和可观测性原则,即效能参数的变化能够直接影响到系统效能数量的变化,并且这种变化是可以被观测到的。
显然,对于反潜作战中潜艇位置和运动参数存在随机性的搜潜任务,效能指标应选择具有概率性质的数字特征来表示,通常用发现目标的概率—搜索概率指标来反映反潜直升机的搜潜效能。
另外,对于巡逻警戒反潜任务,由于没有确切的搜索目标或更多的目标信息,效能指标还可以选用单位时间内搜索面积的大小和覆盖指定搜索海域的平均搜索时间来衡量。
搜索概率取决于目标散布的规律和大小、搜索的方式、有效作用距离、反潜直升机的巡逻飞行速度等因素,这些因素对于不同的搜索手段是有区别的,例如对于声纳浮标还与投放浮标的数量及监视的持续时间(工作时间)等有关。搜索效率取决于搜索指定海域的大小,以及上述同样的其它有关因素。
2.2 反潜直升机搜潜流程
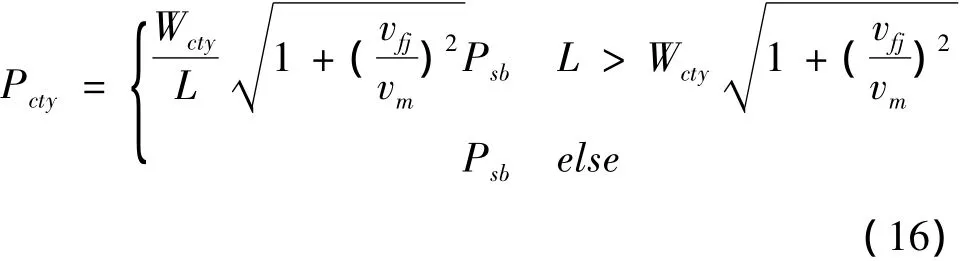
反潜直升机在近海海域巡逻未发现潜艇迹象之前,首先采用雷达、红外、电子支援系统对海面上处于潜望镜状态或通气管状态航行的潜艇进行搜索。当发现和确认海面有潜艇航行的迹象时,或通过数据链通道获得在某海域发现潜艇的信息时,反潜直升机应立即飞往目标上空,指挥员要求声纳浮标系统操作员进入搜索状态,首先投放温度深度和海洋噪声浮标进行测量,也可以调出数据库中存储的作战海域水文数据。根据测量或查询结果选择声纳浮标工作深度,确定搜潜浮标布阵间距,然后布设被动全向声纳浮标搜索阵。典型的浮标阵包括5、7或9枚浮标组成的圆形搜索阵、16枚浮标组成的方形搜索阵,以及若干浮标布成的直线(弧线)拦截阵等。浮标阵布设完毕,直升机在浮标阵区域上空巡逻飞行,监视和等待目标信号。声纳浮标探测的噪声信号经过声信号处理机处理后,获得目标噪音特征。声纳员通过监听潜艇噪声也可以进行目标识别。
经识别确认存在潜艇后,马上进行对潜艇的定位。定位方法包括利用4枚被动全向声纳浮标进行低频分析与定位,双曲线定位或相关分析处理定位,被动定向声纳浮标的定向分析与记录定位,主动全向声纳浮标的主动定位等。在目标己初步定位的条件下,可利用磁探仪进一步对目标进行识别和精确定位。在目标范围比较明确时,也可直接使用磁探仪进行搜索和定位。
图1 反潜直升机搜潜流程
2.3 反潜直升机搜潜的组合方案
在实施反潜作战任务的过程当中,指挥员面临的信息量很大,需要根据不断变化的战场态势,频繁地与任务机组人员沟通,及时做出正确的决定。
1)巡逻反潜
巡逻搜潜时在指定的海域内是否存在潜艇是不确定的,其它兵力在某片海域内发现过潜艇也不尽能提供概略位置点的信息(也就是说潜艇可能均匀地出现在指定海域内每一个位置点上),需要运用搜索手段检查排除或确认。
研究航空搜潜模式是典型的搜索寻优问题。从搜索的基本模式来看,搜索可以分为最优搜索和随机搜索。所谓最优搜索就是根据目标的分布规律,在一定的搜索力约束条件下,寻求一个搜索计划或路线,使得发现目标的概率最大或时间最省;而随机搜索是搜索率在搜索区域中是均匀分布的,搜索的路线是随机的。
当潜艇分布未知的情况下,一般采用扇形搜索路线,其基本组成单元为巡逻闭合线搜索。具体的搜潜组合为:远距离时采用雷达进行目标(含潜望镜和通气管)检测,如果发现目标则降低高度通过红外和机载磁探仪进行搜索确认,确认目标后转入声纳搜索状态。因此其搜潜概率为:

2)应召反潜
从执行反潜任务前有或无潜艇位置和运动初始信息来看,应召搜潜时在指定的海域内某一时刻概略位置上存在过潜艇的活动,但由于潜艇活动的随机性,潜艇的当前位置呈一定的分布,使得反潜兵力到达搜索区域后,需要再次搜索定位:
反潜直升机机根据命令飞到指定海域,首先通过应召预报点,以一定的搜索半径作圆周搜索,其搜索圆半径为潜艇速度与反潜直升机延迟时间的积。若未发现目标,则采用扩大或者缩小搜索半径的方法继续搜索,即采用螺旋搜索。
具体搜潜组合为:根据数据链的指令到达应召预报点上空,通过磁探仪对预报区域进行探测,在此基础上确定潜艇的可能性与可能位置,然后投放声纳浮标进行精确定位。因此应召搜潜的概率为:

3 搜索概率仿真
3.1 仿真环境假设
1)总体假设:反潜机航渡及搜索时飞行速度相同且保持不变;潜艇运动时,速度大小不变,且在[Vdl,Vdh]内均匀分布。
2)巡逻搜索假设:潜艇初始点位于距离巡逻线长度为L且与巡逻线平行的任意点上(L长度能保证在探测期间,潜艇一定能够穿越探索区),潜艇运动方向垂直于巡逻线。
3)应召搜索假设:当其他兵力发现目标,命令反潜机前去搜索,潜艇开始逃跑时,开始计时;潜艇逃跑的初始航向在360°内服从均匀分布,且在逃跑过程中保持不变;定义潜艇初始位置与目标散布中心的距离为矢量:该距离偏北时为正,否则为负,假设其服从正态分布;潜艇初始方位服从360°上的均匀分布。
3.2 结果与比较
1)巡逻搜索仿真与分析
模拟条件如下:巡逻线长度50km,巡逻时间3h,飞行速度120km/h,飞行高度50m;磁探仪探测300m,可靠性0.9,深度100m,每次搜索时间 2min,接触概率为0.05%,浮标作用距离为700m,可以获得搜索概率与潜艇速度的关系如图2所示,直升机数量与搜索概率的关系如图3所示。
当4架巡逻直升机编队,并假定潜艇潜望深度航行状态,雷达和红外的检测概率为0.5,并假定3架飞机检测到潜艇的潜望镜,则总的巡逻搜索效能如图4所示。
2)应召搜索仿真与分析
假设搜索时间1h,飞行速度120km/h,飞行高度50m,磁探仪探测 300m,可靠性0.9,深度100m,应召搜索海区面积:30*30km2。接触概率为0.1%,浮标正常运行概率为 0.9,作用范围为6 km2,可以获得直升机数量与搜索概率的关系如图5所示,搜索概率与浮标数量的关系如图6所示。
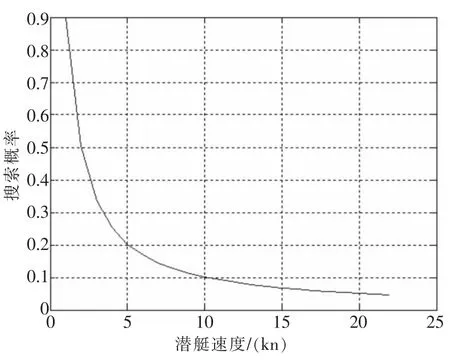
图2 搜索概率与潜艇速度关系图

图3 直升机数量与搜索概率关系图
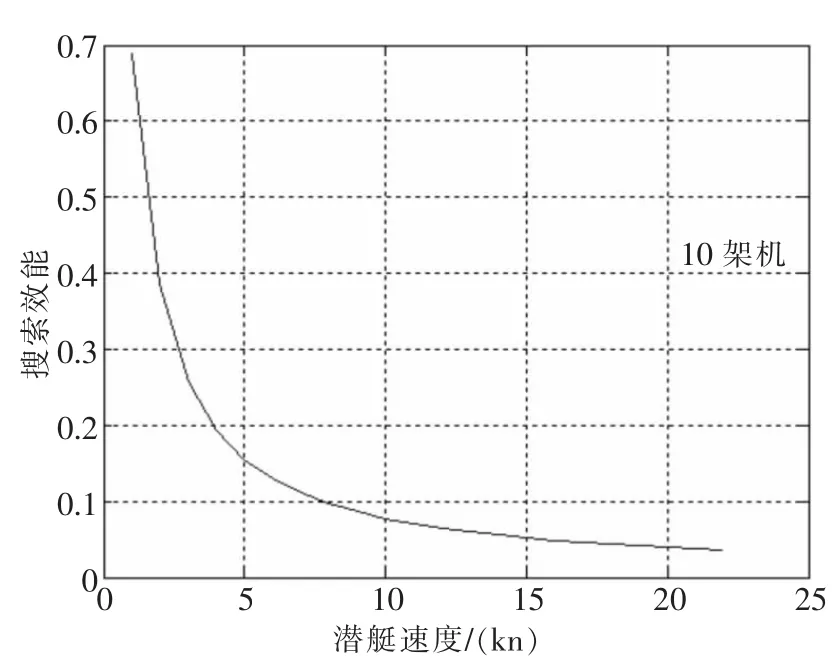
图4 搜索效能与潜艇速度关系图
4 总结
针对反潜直升机机的搜潜问题,在详细分析反潜直升机所搭载的众多探潜设备,包括雷达、红外前
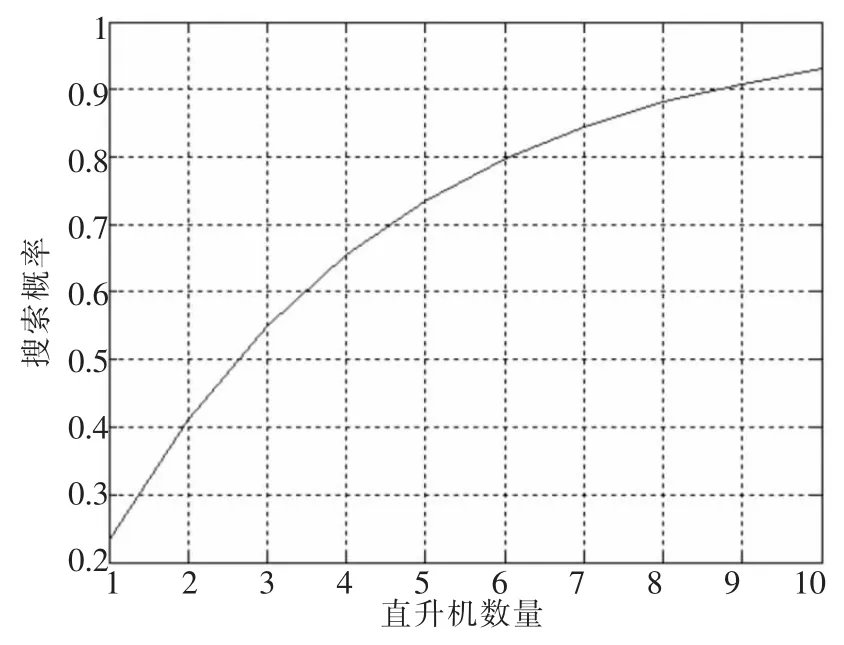
图5 搜索概率与直升机数量关系图
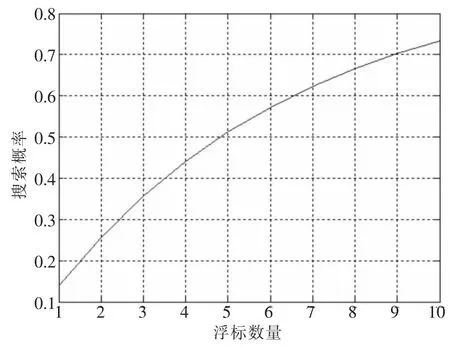
图6 搜索概率与浮标数量关系图
视仪、声纳浮标、磁探仪等的性能的基础上,针对应召和巡逻两种典型搜潜方式进行了典型组合搜潜方案的效能分析,为直升机反潜的研究提供相关的技术支持。
[1]孙明太.航空反潜装备[M].北京:国防工业出版社,2012.
[2]丁鹭飞,耿富禄.雷达原理[M].西安:西安电子科技大学出版社,2001.
[3]朱炬波,周宏潮.红外警戒系统的运动参数估计算法[J].红外与毫米波学报,2003,22(2):101-104.
[4]张阳程,盛 飞,王光源,等.航空磁探仪搜索概率模型建立与仿真研究[J].海军航空工程学院学报,2008,23(3):332-335.
[5]屈也频.反潜巡逻飞机搜潜辅助决策系统建模与仿真研究[D].北京:国防科学技术大学,2008.
[6]岳增坤,高晓光.固定翼反潜巡逻机及其作战效能分析[J].火力与指挥控制,2007,32(5):27-30.
[7]赵晓哲,沈治河,主编.海军作战数学模型[M].北京:国防工业出版社,2004.
猜你喜欢
垂钓(2022年3期)2022-05-14
小哥白尼(军事科学)(2022年1期)2022-04-26
垂钓(2022年1期)2022-02-09
火力与指挥控制(2021年8期)2021-09-08
舰船电子工程(2021年5期)2021-06-04
考试与评价·八年级版(2020年5期)2020-10-29
垂钓(2019年2期)2019-09-10
小学科学(学生版)(2019年6期)2019-07-10
无人机(2017年10期)2017-07-06
现代防御技术(2016年1期)2016-06-01
