
拖靶垂向运动传递函数的求解
2013-09-14 08:06王成军李世秋郑成军
电子测试 2013年5期
王成军 李世秋 郑成军
(辽宁兴城92419部队 125106)
拖靶系统是一类特殊的飞行器系统。拖靶系统主要包括拖带飞机、拖缆和无动力的拖靶。其中拖带飞机一般为有人驾驶飞机,拖缆是一根长度约几千米而直径只有几毫米的钢缆,拖靶多为外形类似导弹的无动力飞行器。拖靶系统的工作特点是用有动力的拖带飞机,通过拖缆牵引着拖靶飞行。
拖靶系统的应用基本上为军事应用,即用拖靶来模拟来袭的导弹类飞行器,以为各种反导弹武器系统提供防御和打击的目标。由于在工作结束后,如果拖靶未被击中,则可以通过缠绕拖缆将拖靶收回,所以拖靶可以多次使用,具有很高的性价比。目前,美英等国家生产和应用的拖靶已经具有多种型号并且形成系列。
在拖靶的设计中,最关键的是高度控制系统的设计,而拖靶垂向运动传递函数是高度控制系统设计的理论基础。我国的拖靶设计生产起步较晚,目前很少见关于拖靶系统设计方面的报道。
1 拖靶的受力分析
考虑到拖靶实际供靶飞行中基本上是一个纵向的等速直线运动,且滚转角速度为零,则可以把拖靶置身于惯性坐标系中,按刚体平面运动来分析。拖靶受力图如图1示。
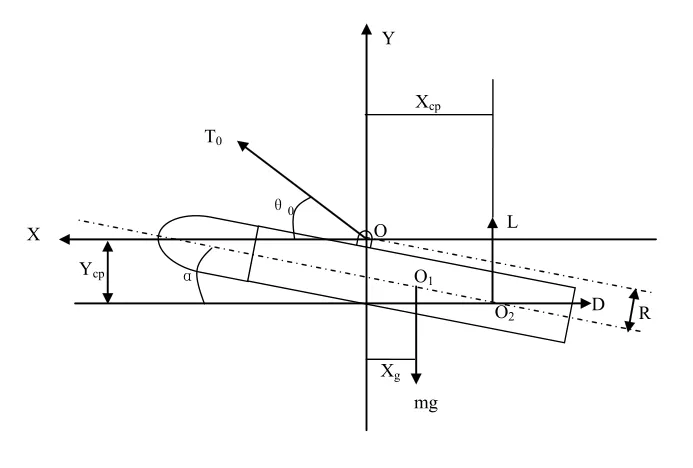
图1 拖靶受力分析图
0-拖靶牵引点,即原点
01-拖靶重心
O2-压力中心
R-牵绕点到轴线距离
Xcp-压力中心到原点水平距离
Ycp-压力中心到原点垂直距离
Xg-重心到原点水平距离
L-升力
D-阻力
T0-牵引点拉力
θ0-拉力相对来流的倾角
mg-拖靶重量
α-拖靶迎角(攻角)
根据受力分析,可以看出,拖靶受力的垂向分量(向上为正)包括重力-mg、牵引点拉力的分量TH和升力L,当拖靶存在垂向的速度时(拖靶的垂向速度远小于水平速度),垂向上还有阻力D的分量Dy。
2 建立拖靶垂向运动的微分方程
根据牛顿第二定律,在垂直方向上可以得到

其中H为拖靶的高度。
在这个微分方程中,重力mg是不变的。下面计算其他三个分量。
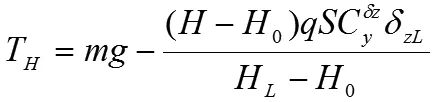
2.1 计算TH
由于拖缆是长度约为几千米的钢缆,不能作为一个刚体来看待,而且拖靶系统是一个包括飞机、拖缆和拖靶在内的多体运动系统,因此牵引点的拉力计算十分复杂。在此,我们根据小扰动假设,计算在平衡状态附近的张力。首先,可以用静态方法计算出几个平衡点附近不同状态下的拖缆张力值,然后进行线性化处理。方法如下:
设靶翼角z0=0时,即高控系统不工作状态下,对应的拖靶飞行高度为H0,
相应的,设H0处拖缆拉力的垂直分量为TH0,
则 TH0= mg,
设HL处拖缆拉力的垂直分量为THL

那么基于线性假设,对于靶高H处,拖缆拉力的垂直分量
2.2 计算升力L
由于拖靶飞行时的攻角很小,而且拖靶的气动外形基本为上下对称,所以靶体和尾翼的升力可以忽略不计,即拖靶的升力主要来自舵翼。根据飞行力学的原理,升力的计算公式为

2.3 计算Dy
气动阻力的垂直分量与垂向速度有关。设拖靶的水平速度为vx,由于拖靶飞行的静稳定性较大,当拖靶具有垂向速度时,拖靶能够迅速使迎角变为零,即对垂向速度的阻尼主要来自气动阻力在垂向上的分量。因为垂向速度为 Hvy˙= ,则速度方向与水平面的夹角为

则有
阻力DqSCD= ,其中CD为拖靶的阻力系数。
由于在拖靶的超低空飞行阶段,拖靶的水平速度Vx是基本恒定的,所以可以认为拖靶受到的空气阻力的垂直分量与垂向速度成正比。
2.4 建立微分方程
将上述的计算结果代入到微分方程中,可以得到

在平衡点附近,上面微分方程中的系数可以认为是常数,这样就得到了一个线性化的数学模型,从而可以采用经典的线性系统理论来进行控制律的设计。
3 传递函数的确定
对拖靶的线性化模型采用Laplace变换进行处理,即用各个系数在拖靶飞行的平衡工作点处的值来近似代替实际值,然后对该微分方程进行拉氏变换,就可得到系统的传递函数。根据Laplace变换的特性,可以得到

即

即可得到:
从舵翼角z到高度H的传递函数

从零位舵翼角高度H0到高度H的传递函数

4 结束语
拖靶的垂向运动传递函数是设计拖靶高度控制系统的基础。以拖靶为研究对象,通过受力分析,得到拖靶的垂向运动微分方程,再根据线性系统理论中的小扰动假设,就能够从静态出发,研究平衡点附近的动态特性。应用这种方法,在拖靶的设计阶段得到的传递函数,为拖靶高度控制系统的设计提供了定量分析的手段,对其设计工作意义重大,为分析实际拖靶的飞行状态提供了重要的工具。
[1] 王一飞.TW-1拖靶缆绳张力与形状参数的计算. 南京航空学院学报,1992
[2] 胡寿松.自动控制原理. 科学出版社,2001
[3] 吴森堂.飞行控制系统. 北京航空航天大学出版社,2005
[4] 方振平.航空飞行器飞行动力学. 北京航空航天大学出版社,2005
猜你喜欢
科教导刊·电子版(2022年5期)2022-03-19
世界海运(2021年9期)2021-10-08
装备制造技术(2020年1期)2020-12-25
空间科学学报(2020年4期)2020-04-22
兵工学报(2019年7期)2019-08-28
测控技术(2018年7期)2018-12-09
船海工程(2018年5期)2018-11-01
光学精密工程(2016年4期)2016-11-07
北京航空航天大学学报(2016年3期)2016-02-27
少年科学(2014年7期)2014-08-18
