基于多环控制的BuckBoost型LED驱动系统设计*
2013-09-11 08:59李勇智黄何平
吉首大学学报(自然科学版) 2013年3期
李勇智,王 玲,黄何平
(湖南师范大学物理与信息科学学院,湖南长沙 410082)
基于多环控制的BuckBoost型LED驱动系统设计*
李勇智,王 玲,黄何平
(湖南师范大学物理与信息科学学院,湖南长沙 410082)
在OCC(One Cycle Control)控制Buck-Boost型LED照明驱动的基础上提出一种多环控制策略,设计了Buck-Boost型高效LED照明驱动系统.重点阐述多环控制策略原理,建立系统模型,并分析了控制系统相关性能.系统仿真表明,新型多环控制系统具有功率因数高、输出阻抗低、动态性能好等性能,达到了预期目标.
LED照明;Buck-Boost;多环控制;小信号模型;功率因数
LED照明具有节能、高效、寿命长、环保等特点,是从白炽灯、荧光灯到高压气体放电灯之后的又一场照明光源革命[1],也是“绿色照明”理念和半导体发光技术相结合的产物[2].LED照明的发展对消费类电子、汽车电子、信息产业及光电子产业产生很大的推动作用,LED照明的兴起已是21世纪照明消费产品的大势所趋[3],LED照明驱动控制系统的高效性、快速响应性、高功率因数、稳定性等对该系统工作性能与设计提出了更高的要求.
常用的OCC控制Buck-Boost型LED照明驱动如图1所示,其响应速度快,跟随控制能力和抗输入扰动能力较强,但由于滤波器性能的动态特性,整个驱动系统的输出电压波形会受到外界因素干扰,从而降低了驱动变换器的动态性能[4].
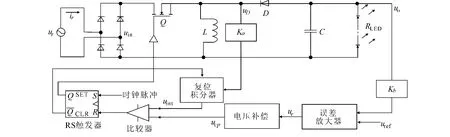
图1 OCC控制Buck-Boost型LED照明驱动
1 LED驱动系统工作原理
为了提高Buck-Boost型驱动系统的功率因数和动态性能,在OCC控制策略的基础上,提出了一种新型多环控制方法,设计出多环控制Buck-Boost型LED照明驱动系统,如图2所示.与OCC控制Buck-Boost型LED照明驱动相比,结构上主要增加了由电压微分器、增益Kc及加法器组成的环路和OCC控制的Ka,Kb这2条环路,故称为多环控制.

图2 多环控制Buck-Boost型LED照明驱动
在图2中,交流输入电压为ur经过二极管整流后得到电压uin.开关管Q由RS触发器控制,在时钟脉冲上升沿到来时,RS触发器的同相端给开关管1个高电平,开关管导通.输出电压uo经过采样得到1个电压信号Kbuo,该电压与参考电压信号uref共同输送给误差放大器.ue经过电压补偿得到信号ucp之后再输送给比较器的反相端.电压信号uD经过采样得到的信号KauD再输送给加法器的1个输入端,加法器的另一个输入端是输出电压经过微分器、增益Kc后的电压信号Kcuvd,加法器的输出端接到带复位开关的积分器上,积分器的输出端uint与比较器的同相端相连,当积分电压信号uint上升到补偿后的电压信号ucp后,比较器输出高电平,RS触发器复位,同相端输出低电平,开关管断开,反相端输出高电平,使复位积分器复位清零,直到下一个时钟脉冲到来,开关管再次导通.
2 LED驱动系统模型
2.1 主电路小信号模型
采用状态空间平均法[5]为Buck-Boost型大功率LED照明驱动主电路建模,取电感电流、电容电压为状态变量,输入输出电压分别为输入输出状态变量.Buck-Boost型LED照明驱动主电路空间状态平均方程为

其中:iL为电感电流;uC为电容电压;uin为输入电压;uO为输出电压;D为导通占空比.对各相关变量施加小信号扰动,去除二阶小信号部分,采用拉普拉斯变换可得传递函数为:
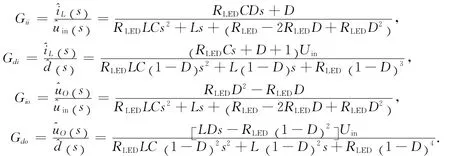
根据上述传递函数可以画出Buck-Boost型LED照明驱动系统主电路小信号模型如图3所示.
2.2 多环控制小信号模型
图2中的微分器由电阻Rb、电容Cb构成,则有
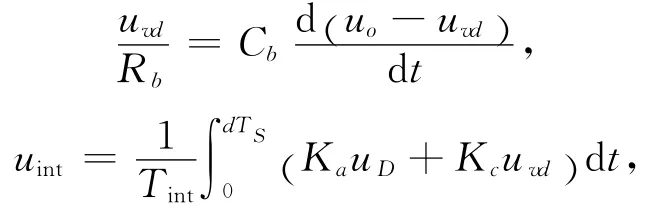
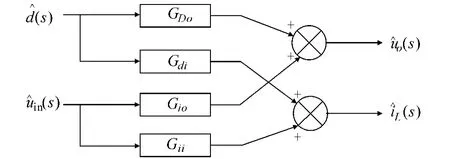
图3 Buck-Boost型驱动器主电路小信号模型
其中:uvd为电压微分器的输出电压;uo为输出电压;
uint为积分电压;Tint为积分时间;d为导通占空比;TS为时钟脉冲周期;uD为反馈电压;Ka,Kb为2条环路的增益.令Tint=TS,当开关管Q导通时,反馈电压uD等于输入整流电压uin,并且当积分器的输出电压信号uint等于电压补偿器的输出ucp时,比较器发生翻转,输出高电平,RS触发器复位,开关管Q断开,RS触发器的反相端使得带复位开关积分器复位清零,则

对(1)式中的基本变量取小信号扰动,去2阶小信号部分,采用拉普拉斯变换可得


多环控制Buck-Boost型LED照明驱动系统控制环节小信号模型如图4所示.
2.3 系统模型
结合Buck-Boost型LED照明驱动系统主电路小信号模型和多环控制小信号模型,可以得到多环控制Buck-Boost型LED照明驱动系统模型如图5所示.

图4 多环控制小信号模型
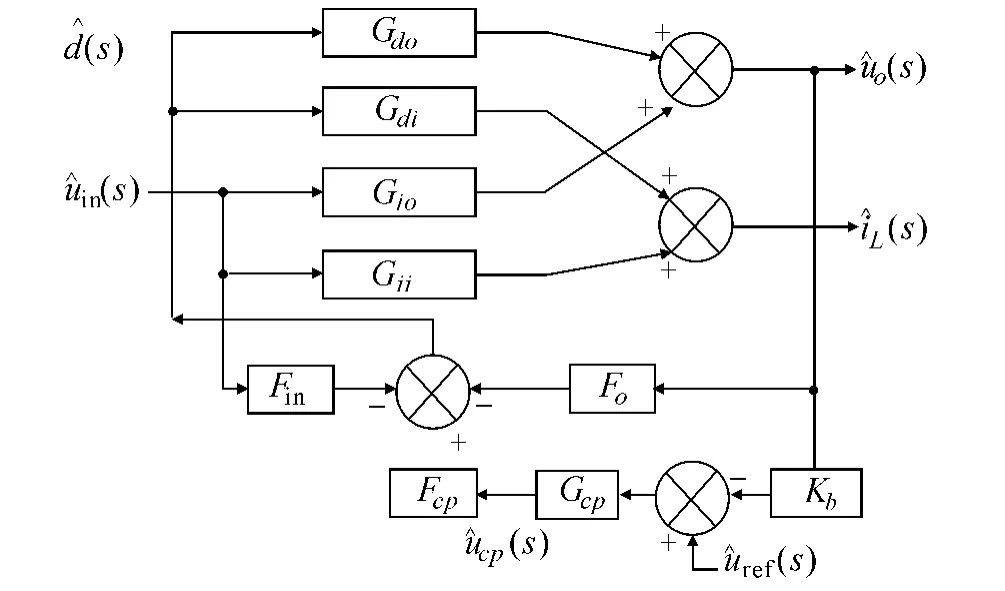
图5 多环控制Buck-Boost型LED照明驱动系统模型
运用梅森公式[6]化简可得输入输出传递函数为

从(2)式可以看出,即使输入电压有一个较大的扰动,输出电压也不会受到影响,即多环控制Buck-Boost型LED照明驱动系统有较强的抗输入干扰能力.多环控制Buck-Boost型LED照明驱动系统的控制输出传递函数和系统环路增益函数分别为:

3 仿真分析
为了验证文中所提出的多环控制Buck-Boost型LED照明驱动系统的有效性与合理性,运用MATLAB中Simulink,SimPowerSystems工具[7]分别建立Buck-Boost型LED照明驱动的主电路模型和多环控制模型,以输入、输出端口同名的形式连接,如图6,7所示.主要电路参数:输入电压为90~270V(额定220V);开关频率为100kHz;输出电压为40V.由示波器Scope1输出可得多环控制Buck-Boost型LED照明驱动系统的交流输入电压和输入电流波形,如图8所示.从图8可以看出输入电压为220V、频率为50Hz的正弦波,输入电流波形近似正弦,即输入电流很好地跟踪输入电压,总谐波失真小,功率因数高.图9为示波器Scope2的系统输出电压波形,从图9可以看出,系统响应速度快,超调量较小,输出电压稳定为-40V,实现了反极性输出,符合输入与输出电压关系.

图6 Buck-Boost型LED照明驱动主电路模型
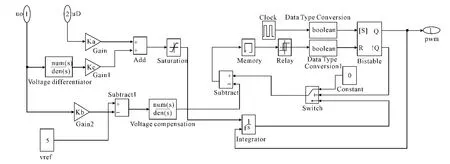
图7 多环控制模型
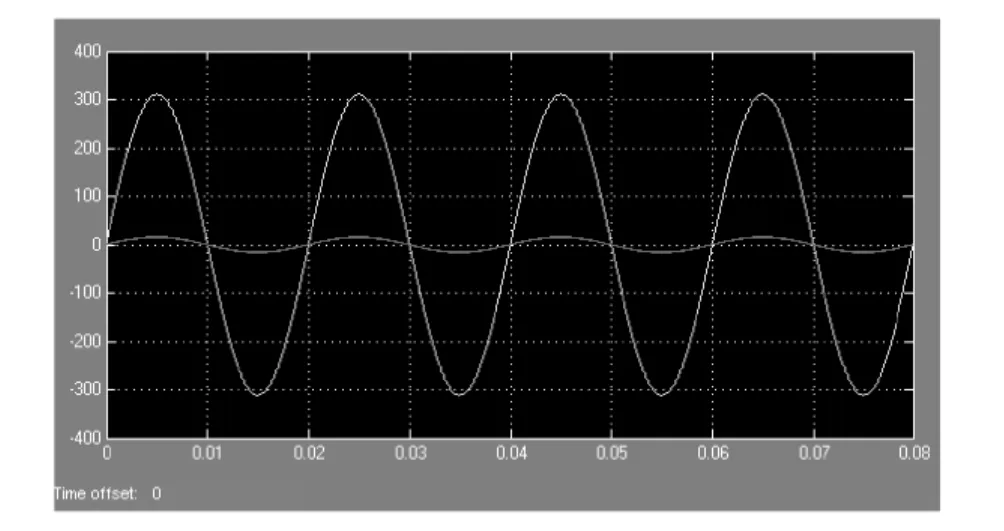
图8 交流输入电压与电流波形

图9 驱动系统输出电压波形
当t=0.01s时,在输入电压端施加一个幅值为25V、周期为0.004s的方波电压信号扰动,如图10所示.从图10可以看出,输入电压发生扰动,输出电压没有受到影响,继续保持稳定输出,和前面输入输出传递函数为0的分析结果完全吻合.
当t=0.01s时,使负载电流瞬间从1A跳变到0.8A,如图11所示.由此可知,当负载电流跳变时,输出电压波形也产生一个较大的跳变,但经过相当短的时间,输出电压就恢复稳定,因此,多环控制Buck-Boost型驱动系统具有良好的动态负载性能.
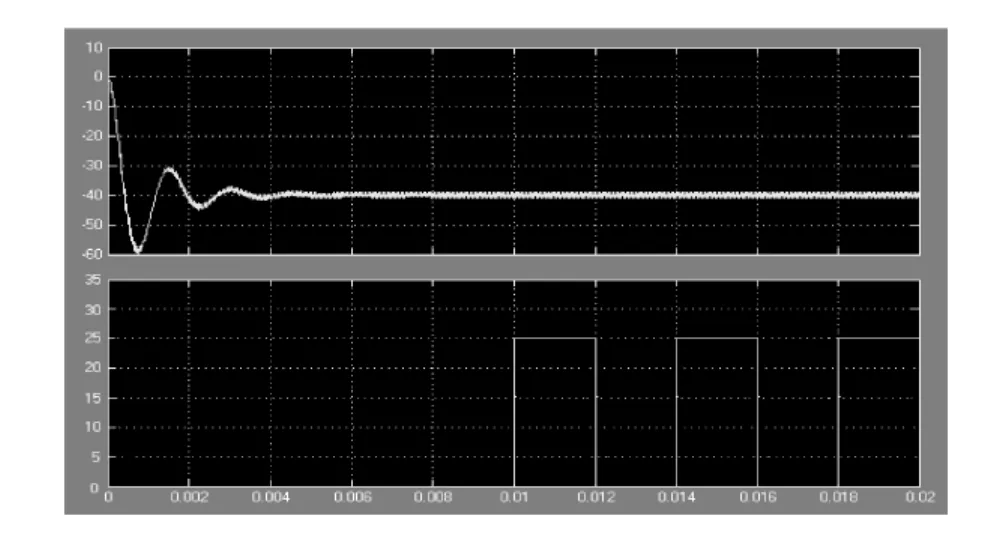
图10 抗输入电压扰动分析
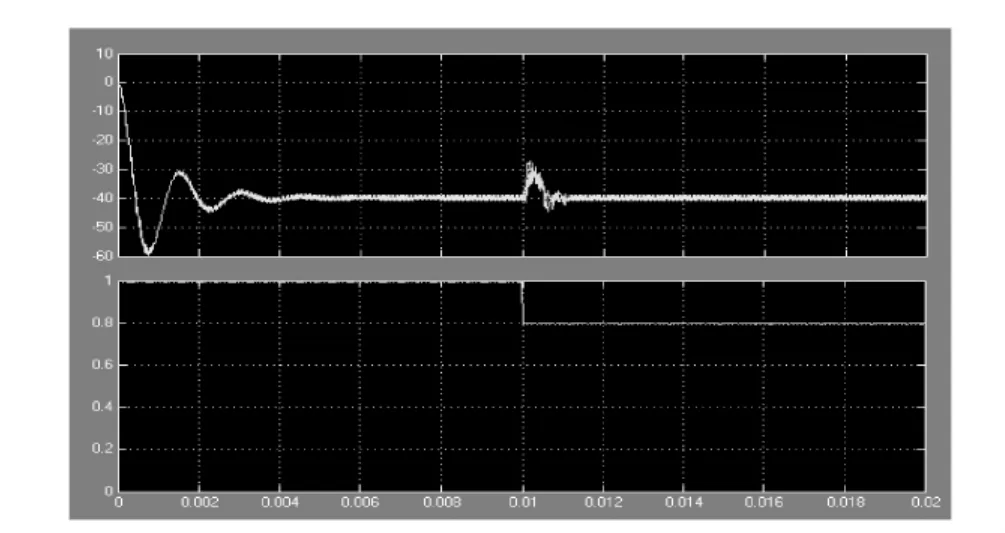
图11 抗负载扰动能力分析
图12为OCC控制策略和多环控制策略下Buck-Boost型LED照明驱动功率因数与占空比的关系,可以看出,这2种控制策略在不同占空比下的功率因数均大于0.9,并且多环控制策略的功率因数明显要高于OCC控制策略,并达到0.99.

图12 功率因数与占空比的关系

图13 宽输入电压范围下的功率因数曲线
图13为OCC控制策略和多环控制策略Buck-Boost型LED照明驱动系统在宽输入电压范围下的功率因数.从图13可以看出,这2种策略在90~270 V宽输入电压范围内的功率因数均大于0.92,并且多环控制策略的功率因数要高,从而体现了多环控制策略的优势.
图14为输出阻抗特性.从图14可以看出,多环控制策略Buck-Boost型LED驱动的输出阻抗要比OCC控制策略小,因此,多环控制策略Buck-Boost型LED照明驱动系统受负载电流变化的影响小,动态负载特性好.
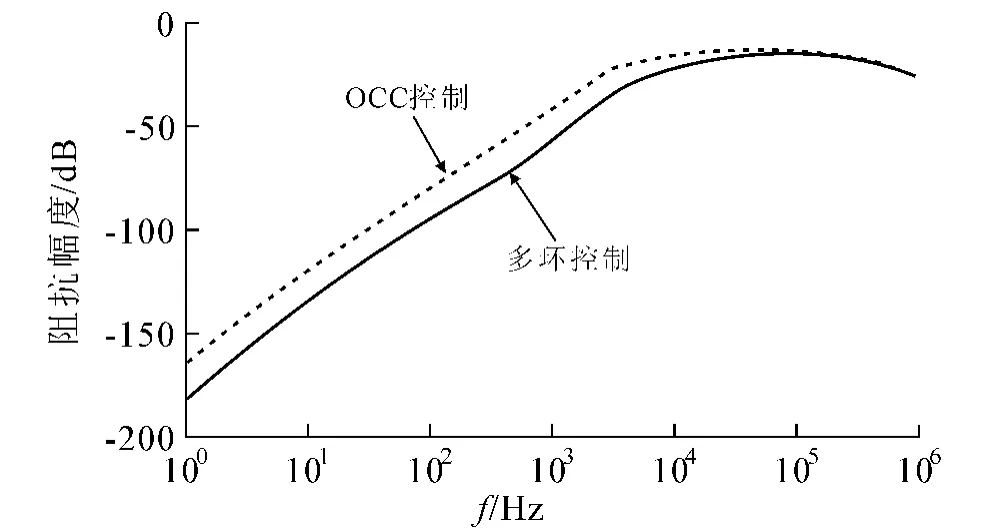
图14 输出阻抗特性曲线
4 结语
在OCC控制Buck-Boost型LED照明驱动的基础上提出了一种多环控制策略,得到Buck-Boost型LED照明高效驱动系统,并在多环控制策略基本原理分析的基础上建立了主电路小信号模型、控制环节小信号模型及整个系统模型,通过MATLAB软件中Simulink、SimPowerSystems工具建模仿真可知:在多环控制Buck-Boost型LED照明驱动中,输入电流很好地跟踪输入电压,总谐波失真小,功率因数高,系统响应速度快,超调量较小,输出电压稳定在-40V,具有很高的抗输入电压扰动和抗负载扰动能力.和OCC控制策略相比,多环控制策略下Buck-Boost型LED照明驱动在不同占空比和宽输入电压范围下功率因数均高(达到0.99),从输出阻抗特性曲线可以看出,多环控制下输出阻抗小,动态负载性能要好.
[1] TSAO J Y.Solid-State Lighting:Lamps,Chips and Material for Tomorrow[J].IEEE Circuits Devices Magazine,2009,20(3):28-37.
[2] MEHTA R,DESHPANDE D,KULKARNI K.LEDs-A Competitive Solution for General Lighting Applications[J].IEEE Energy,2008(9):1-5.
[3] 廖志凌,阮新波.半导体照明工程的现状与发展趋势[J].电工技术学报,2011,21(9):106-111.
[4] HWU K,CHOU S.A Simple Current-Balancing Converter for LED Lighting[J].IEEE Applied Power Electronics,2012,16(2):16-19.
[5] 裴云庆,杨 旭,王兆安.开关稳压电源的设计和应用[M].北京:机械工业出版社,2011:87-90.
[6] 黄 坚.自动控制原理及其应用[M].北京:高等教育出版社,2008:38-46.
[7] 浦锡锋,王宏华.基于MATLAB的单周期控制PFC Boost变换电路建模与仿真[J].电气技术与自动化,2007,63(6):145-147.
(责任编辑 陈炳权)
Design of Buck-Boost LED Lighting Driver Based on Multi-Loop Control
LI Yong-zhi,WANG Ling,HUANG He-ping
(College of Physics and Information Science,Hunan Normal University,Changsha 410082,China)
A multi-loop control strategy is proposed based on OCC(One Cycle Control)-controlled Buck-Boost LED lighting driver,and a novel efficient Buck-Boost LED lighting driver is obtained.The multiloop control strategy principles are analyzed in detail,the system model is built and the control system performance is made in-depth studies.It can be seen through system simulations that the novel multi-loop control system has better performance such as high power factor,low output impedance and good dynamic performance,and it has achieved the desired goal.
LED lighting;Buck-Boost;multi-loop control;small signal model;power factor
TP311;TM464
A
10.3969/j.issn.1007-2985.2013.03.009
1007-2985(2013)03-0039-06
2013-04-11
湖南省教育厅科学研究重点资助项目(12C1168)
李勇智(1988-),男,湖南常德人,湖南师范大学硕士研究生,主要从事开关电源、LED驱动、芯片设计及通信与信息技术处理等研究
王 玲(1962-),女,湖南师范大学物理与信息科学学院教授,博导,主要从事现代网通信技术和噪声电子学研究.
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2021年4期)2021-08-30
北京航空航天大学学报(2021年7期)2021-08-13
数学物理学报(2019年4期)2019-10-10
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
山东工业技术(2016年15期)2016-12-01
电子制作(2016年1期)2016-11-07
通信电源技术(2016年6期)2016-04-20
通信电源技术(2016年1期)2016-04-16