
RBF神经网络下的汽油机基本点火提前角预测方法*
2013-09-04 05:07王彦岩杨建国
汽车技术 2013年10期
王彦岩 杨建国
(哈尔滨工业大学)
1 前言
点火提前角对汽油机动力性、燃油经济性及排放均有重要影响,其控制是汽油机电控系统的重要内容之一[1]。目前汽油机点火提前角都通过台架试验来标定,即以某种性能为优化目标,然后确定点火提前角与运行工况之间的关系[2]。由于标定试验不能覆盖所有的运行工况,非试验测定的工况通常采用插值方法确定点火提前角,而插值方法存在一定误差。另外,由于汽油机在实车上与试验台架上运行存在差异,以及制造误差、使用磨损等原因,试验确定的最佳提前角对同型号其它汽油机未必最佳。
神经网络是近年兴起的智能控制领域的一门科学,具有自学习、自适应和高度非线性的特点[3,4],本文将神经网络的特性应用于汽油机点火提前角预测中,为提高汽油机点火控制精度提供新思路。
2 RBF神经网络
径向基函数RBF神经网络 (简称径向基网络)是只有一个隐藏层的3层前馈神经网络结构,与常见的前向神经网络相比,其具有前向神经网络所不具有的最佳逼近性能和全局最优特性,且结构简单,训练速度快。
常用的径向基函数有多种形式,本文采用高斯函数:
式中,x是n维输入向量;Ci是第i个基函数的中心,是与x具有相同维数的向量;σi是第i个感知的变量,其决定了该基函数围绕中心点的宽度;m是感知单元的个数(隐含层节点数);‖x-Ci‖是向量x-Ci的范数,通常表示 x 与 Ci之间的距离;Ri(x)在 Ci处有一个唯一的最大值,随‖x-Ci‖的增大Ri(x)迅速衰减到零。
采用误差纠正RBF学习算法。该算法是从样本中同时对RBF网络中心、基函数宽度和输出单元权值进行监督学习,步骤如下:
a. 建立一个无隐层单元的RBF网络;
b.找出具有最大误差的输入向量;
c.在隐含层增加一个径向基神经元,该神经元与输入向量各元素对应的权值向量被赋予第2步所找到的向量;
d.调节线性层神经元的权重,减少误差;
e.检验误差是否达到要求,如果否,返回第3步;如果是,学习停止。
3 点火提前角神经网络预测模型的建立
影响点火提前角的因素主要有转速、负荷、空燃比、冷却水温度、燃料的辛烷值等。其中汽油机的转速和负荷是决定基本点火提前角的2个最主要参数,水温等通常作为点火提前角的修正因素加以考虑。本文以转速和负荷作为神经网络模型的输入变量,以基本点火提前角作为神经网络模型的目标输出,建立由输入层、隐层和输出层组成的RBF神经网络模型(图1)。
利用台架标定试验获取某汽油机基本点火提前角如表1所列(限于篇幅只给出部分数据)。将该数据分成两部分,大部分试验数据作为训练样本对网络进行训练;取转速为2400 r/min和4400 r/min时不同进气歧管压力下的点火提前角试验数据做为测试样本,以测试网络性能。
首先利用试验数据对建立起来的RBF神经网络进行训练,设定训练目标精度值为0.01,径向基函数的分布密度最终确定为0.2,隐层神经元数最终为95,此时训练效果达到最好,绝对误差也较小。训练得到的部分神经网络基本点火提前角如表2所列。
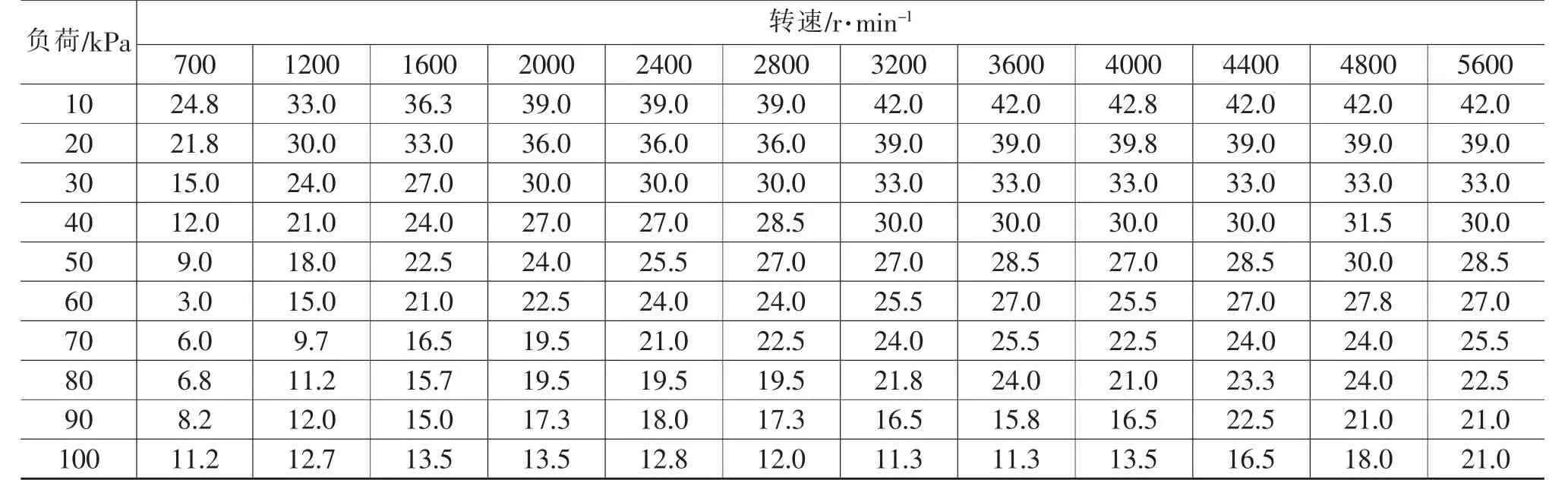
表1 试验测得的某汽油机基本点火提前角 (°)
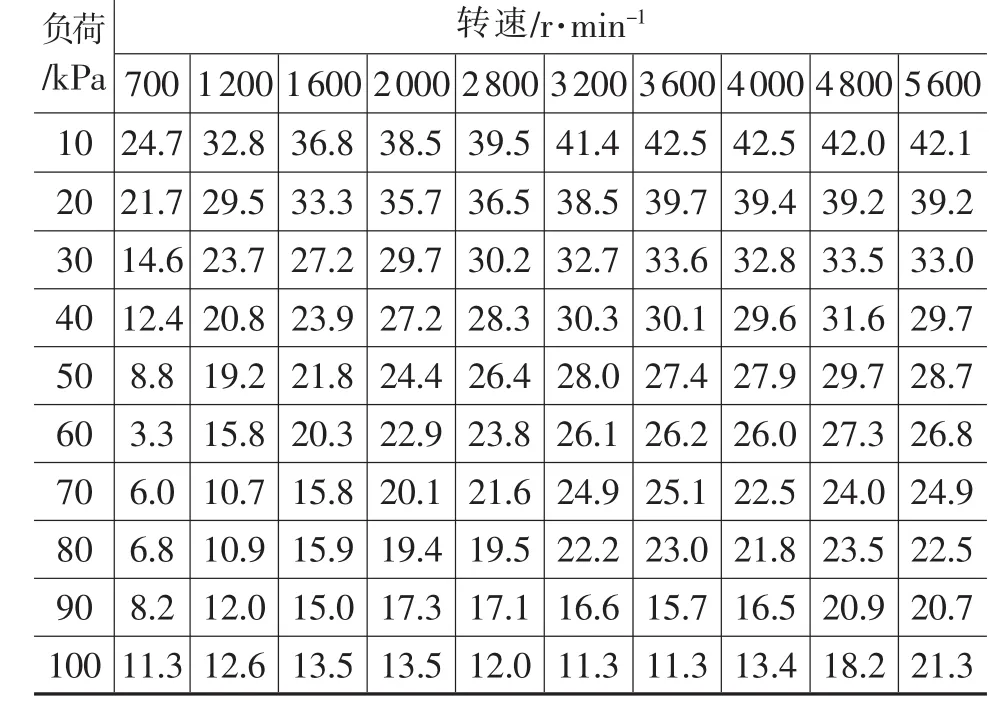
表2 神经网络训练后的基本点火提前角 (°)
4 网络测试与性能分析
神经网络的优势是具有非线性映射能力,经过训练后能够对非试验工况进行预测。为验证神经网络的性能,对已训练好的神经网络进行测试,将转速分别为2400 r/min和4400 r/min时不同进气歧管压力工况作为神经网络的输入,预测的基本点火提前角做为神经网络的输出,结果如表3所列。
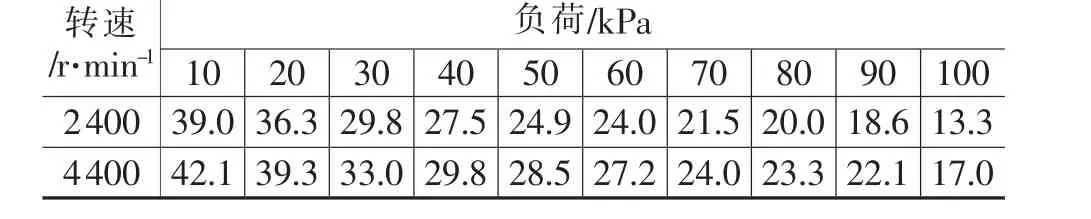
表3 神经网络预测的点火提前角结果 (°)
表3测试结果与表1标定试验中获得的基本点火提前角相比,20个测试样本中最大绝对误差为0.6°,最大相对误差为3.9%,能够满足精度要求。
为进一步检验神经网络确定的基本点火提前角的精度,再与传统的插值方法进行对比。将转速为2400 r/min和4400 r/min下的各工况作为未知条件,利用其它工况下的试验结果,用3次样条插值法计算基本点火提前角,插值得到结果如表4所列。
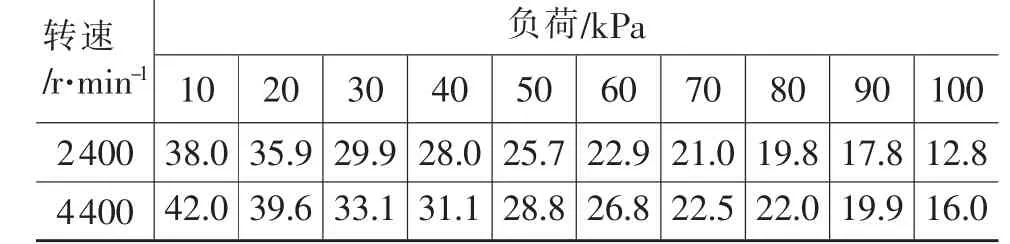
表4 插值法得到的点火提前角 (°)
对于表4插值法得到的点火提前角,与试验值相比,20个测试样本中最大绝对误差为2.6°,最大相对误差达到10%;与表3神经网络方法预测的点火提前角相比,插值法的绝对误差比神经网络方法要大;从误差分布来看,神经网络误差分布相对均匀,插值法的误差分布范围相对较大。
5 结束语
仿真研究表明,本文建立的神经网络预测点火提前角模型能够满足汽油机点火控制的要求。神经网络只要经过足够的训练,就能达到较好的精度。神经网络确定的基本点火提前角,与插值法相比,误差较低;将神经网络权值和阈值保存在计算机中可代替点火MAP图实现点火控制,其需要保存的数据比MAP图少;通过在线训练,神经网络方法可根据汽油机磨损等实际情况修改权值和阈值,使点火提前角保持最佳。
1 麻友良.德国博世公司ME7.4电喷系统.汽车电器,2005(11):23~25.
2 张翔,杨龙,孙明.汽车发动机管理系统制造商及其产品.汽车电器,2006(8):1~4.
3 S.A.Grossberg.Nonlinear Neural Networks.Principles and Architectures.Neural Network, 2005 (1):47~61.
4 袁海英,陈光,谢永乐.故障诊断中基于神经网络的特征提取方法研究.仪器仪表学报,2007,28(1):90~94.
汽车技术2013年10期