
水面舰艇纯机动规避线导鱼雷航向研究
2013-09-02 06:24陈颜辉谷秀明
指挥控制与仿真 2013年1期
陈颜辉,谷秀明
(1.江苏自动化研究所,江苏 连云港 222006;
2.解放军92330部队,山东 青岛 266102;3.海军潜艇学院,山东 青岛 266071)
纯机动规避是指水面舰艇不依靠任何软硬杀伤器材、单纯采取规避机动对抗鱼雷的方式,主要用于尚未装备相应防御器材的水面舰船防御来袭鱼雷,同时纯机动规避也是水面舰船采取多种手段综合防御鱼雷的技术基础。关于水面舰艇对潜射直航鱼雷、声自导鱼雷和尾流自导鱼雷的纯机动规避策略,经过多年研究,目前已经形成了一系列比较成熟的结论[1-5],但关于水面舰艇对潜射线导鱼雷的纯机动规避策略,尤其是规避航向问题,目前还未形成一致性看法。本文以水面舰艇防御“线导+声自导”鱼雷为例,从导引规律、规避目的以及装备性能着手,探讨纯机动规避的航向求取问题。
1 线导鱼雷攻击规律
对于潜艇火控系统所采取的线导导引方法,目前学术界先后提出了近20种,根据导引目的不同,可将其归纳为现在方位导引法、修正方位导引法、前置点导引法和人工导引法四类[6]。
现在方位导引是指潜艇在ti时刻始终将位于ti-1时刻目标方位线上的鱼雷(或自导形心)导向当前目标方位线。由于现在方位导引所要求的目标信息少、无需求解运动要素,被世界各国潜艇部队视为首选导引方法,特别对曲折机动目标而言更是唯一可行的导引方法。
修正方位导引是指在导引过程中,潜艇将鱼雷导引到偏离目标当前方位一定角度的某一方位线上,旨在避免鱼雷航行辐射噪声干扰潜艇声纳对目标的跟踪。但随着鱼雷不断远离发射艇,继续保持这种偏离角必然会造成鱼雷与目标当前方位偏距的增大,难以捕获目标。因此该法主要应用于导引段的前期或中前期。
前置点导引就是将鱼雷导向目标运动的预期位置点,前提是潜艇火控系统必须预先解算出目标运动要素。由于水下潜艇被动解算目标运动要素收敛时间长,若水面舰艇适时采取曲折机动,更可使解算工作无法进行。因此,前置点导引应用条件较为苛刻,在实际运用中意义不大。
人工导引是将鱼雷导引至人为指定点或调整到指定航向。一般是在不宜自动导引时采用,如线导初期的偏离角修正、线导中期的导引方法转换、受干扰或诱骗时的目标选择等情形。受到人为定性判断的局限性影响,人工操作很难对鱼雷进行实时、持续的导引。
综合分析图1中潜射线导鱼雷攻击过程与制导原理可知,根据各个攻击阶段采用的导引方法不同,控制鱼雷航行状态的主体也不同,既可能是潜艇火控系统,也可能是鱼雷本身的自导系统,还可能是艇上操作控制人员,这些控制主体可在一定条件下实现交替转换。因此在水面舰艇防御线导鱼雷行动中,既应考虑到线导鱼雷所处的攻击阶段以及所采取的导引方法,也应考虑到不同的制导主体及其相互转换的条件,权衡各种影响因素来确定防御鱼雷措施。
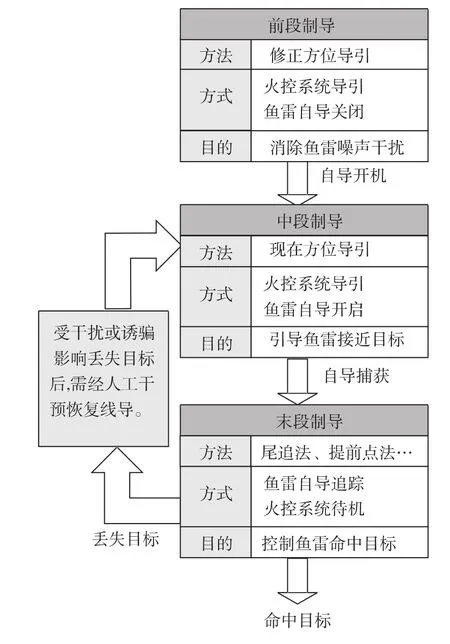
图1 线导鱼雷综合制导过程
2 纯机动规避的实际航向
由于线导鱼雷导引方式的特殊性,水面舰艇实施纯机动规避时需要综合考虑制导主体、规避目的、平台性能等多种因素,下面通过仿真分析纯机动规避航向选择及影响因素。
2.1 规避目的
对于水面舰艇纯机动规避策略的求取,首先应围绕两种基本攻击阶段确定本舰规避目的,即针对线导导引阶段鱼雷的规避和针对自导攻击阶段鱼雷的规避,以此为基础进一步确定规避机动方式。
对处于线导导引阶段的鱼雷,实施线导导引的前提是潜艇能够利用其综合声纳持续可靠地跟踪目标噪声。无论水面舰艇采取何种规避方式,只要不能摆脱敌潜艇的声纳跟踪,也就无法阻止鱼雷沿着潜艇-舰艇方位线不断逼近的事实。在这种情况下,水面舰艇依靠规避机动应达到的目的为:摆脱敌潜艇的声纳跟踪;最大限度地消耗鱼雷航程。
对处于自导攻击阶段的鱼雷,由于依靠自导系统攻击目标的误差要远远小于线导导引误差,因此不再依靠潜艇线导导引,而是采取自主攻击。对于早期线导鱼雷,潜艇可认为此时导引已结束并切断导线,但对当前大多新型线导鱼雷,潜艇不会轻易切断导线,而是处于线导监控状态,一旦认为鱼雷在追踪过程中丢失目标或受到干扰,潜艇可随时恢复线导导引。因此,水面舰艇针对这一阶段鱼雷实施规避机动应达到的目的为:最大限度地消耗鱼雷航程;规避可恢复的线导导引攻击。
文献[7]中对以上两种态势下水面舰艇的规避策略进行了系统阐述,指出:受很多随机性因素影响,水面舰艇依靠纯机动方式很难成功摆脱敌潜艇声纳跟踪以及鱼雷自导攻击,但是可以达到一个确定性的战术意图,即最大限度地消耗鱼雷航程,延缓本舰被鱼雷捕获和命中的时间。
2.2 规避仿真
分析线导鱼雷的弹道特征可知,在没有考虑到延迟时间影响的理想状态下,无论鱼雷处于线导导引阶段还是自导攻击阶段,水面舰艇将其置于舰尾180°舷角高速脱离时,都可以达到最大限度消耗鱼雷航程并远离同方位上发射艇的目的。但在实际对抗中,由人员的反应决策和舰艇的转向旋回所造成的延误时间可能对水面舰艇的最佳规避航向产生较大影响,对此可通过仿真进行探讨。
令水面舰艇、潜艇和鱼雷航速分别为VW=20kn、VQ=2kn~8kn、VT=50kn;指挥员的反应决策时间取td=10s,舰艇旋回角速度 ω =1.7°/s~ 2.0°/s,转向后采取最大航速Va=30kn实施规避。鱼雷发射距离本舰14000m,声自导距离1800m,末制导采取尾追攻击。潜艇采取现在方位形心法导引鱼雷,导引公式为[8]

其中,HT、HQ分别为鱼雷和潜艇的航向,rTQ为鱼雷到发射艇的距离,βTQi、βQWi分别为ti时刻鱼雷及水面舰艇相对发射艇的方位,KTy=0.04s-1为弹道品质的调整系数。
通过设定不同的鱼雷报警舷角XW和报警距离DT来运行仿真程序,记录水面舰艇选择不同航向规避后的生存时间t,显然,最长生存时间tmax对应着鱼雷的最大航程消耗。
图2给出了在鱼雷报警舷角XW=120°、报警距离DT=4000m态势下,水面舰艇将鱼雷置于120°、140°、160°和180°舷角高速规避时的仿真情况。可以直观看出,考虑到延误时间的影响,实际消耗鱼雷航程最大的方向并不是将鱼雷置于舰尾180°舷角的规避方向。
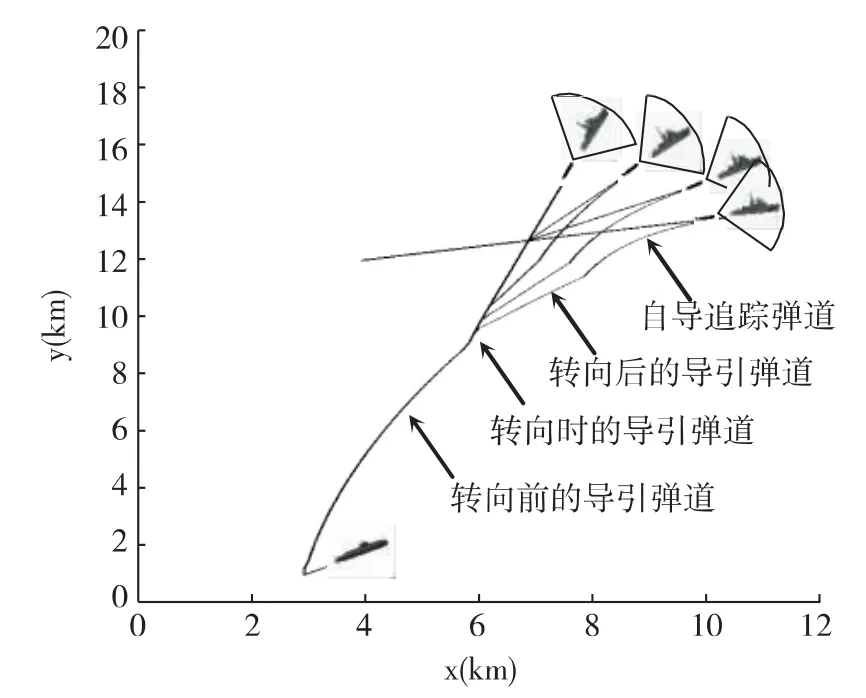
图2 不同规避航向所消耗的鱼雷航程示意图
将水面舰艇生存时间[tmax-2s,tmax]区间内所对应的规避航向范围作为水面舰艇的最佳规避航向,通过对大量仿真数据进行提取、拟合,得到ω=1.7°/s时消耗鱼雷航程最大的规避航向范围如图3所示,ω=2.0°/s时消耗鱼雷航程最大的规避航向范围如图4所示。每组中分别给出了水面舰艇在3000m和6000m报警时的最佳规避航向范围,其中横坐标为鱼雷报警舷角XW,纵坐标为水面舰艇规避方向与鱼雷报警方位的夹角。
2.3 结果分析
通过分析水面舰艇对抗线导鱼雷的规避目的、规避方式以及仿真结果,可以将水面舰艇纯机动规避潜射线导鱼雷的实际航向分布规律概括如下。
1)当发射艇的航速、航向和发射距离等参数在可估测范围内出现较大波动时,图3、图4中各阴影区域并无明显变化。但是当舰艇旋回角速度ω与仿真数据有较大出入时,阴影区域的变化会相对明显。一般来说,机动性能好的中小型水面舰艇旋回速率快,阴影区域会向上偏移;机动性能差的大型水面舰艇旋回速率慢,阴影区域会向下偏移。在实际应用中,需要针对不同水面舰艇的具体性能参数确定该型舰艇的纯机动规避最佳航向范围。
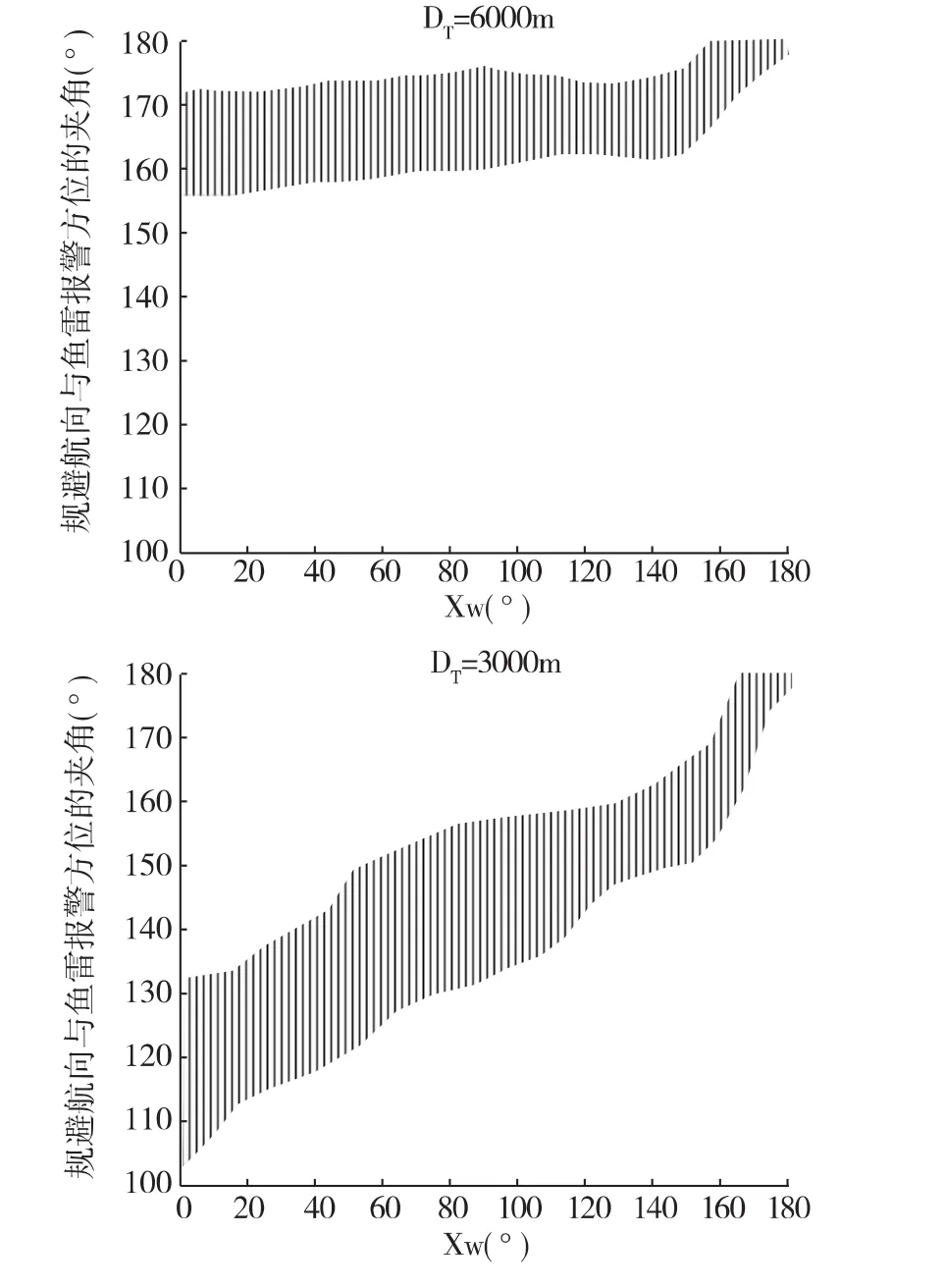
图3 ω=1.7°/s时的最佳规避航向范围
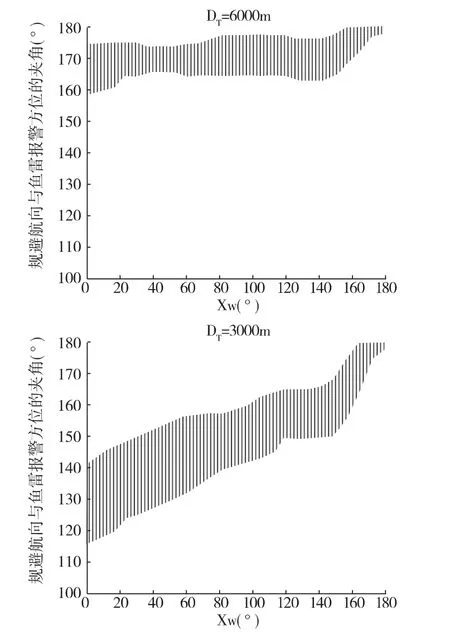
图4 ω=2.0°/s时的最佳规避航向范围
2)在影响最佳规避航向范围变化的所有因素中,起主导作用的仍然是鱼雷报警舷角XW和报警距离DT。对水面舰艇来讲,鱼雷报警舷角XW是可以获取且相对准确的,而报警距离DT通常只能依靠估测,且误差较大。在实际对抗中,可利用估距区间[DTmin,DTmax]的两端点求得规避航向范围的重叠区域,进而确定实际规避航向范围,但在近距小舷角出现报警时,应尽可能减小距离DT的估测误差,以避免估距区间[DTmin,DTmax]两端点对应的规避航向范围出现交集为空的现象。
3)在给定的仿真数据下,若鱼雷报警距离DT较远或报警舷角XW≥150°,则水面舰艇应将尽快走出敌潜艇声纳探测范围作为首要考虑因素,并兼顾最大限度耗费鱼雷航程的需要,此时这两种战术意图的实现并无明显冲突,其最佳规避航向基本都是一致的,即将鱼雷方位置于舰尾大舷角高速脱离。
4)在给定的仿真数据下,若鱼雷报警距离DT较近且报警舷角XW<150°,则水面舰艇尽快远离敌潜艇的规避航向与最大限度消耗鱼雷航程的规避航向冲突较大。考虑到此时态势相对紧迫,应将最大限度消耗鱼雷航程作为首要考虑内容,并兼顾尽快远离敌潜艇的战术需要,因此可选择图3或图4规避航向范围的上限作为实际规避航向。
以上是按照潜艇采取现在方位法导引鱼雷展开的分析,若潜艇采取前置点导引法则会大大缩短鱼雷攻击航程,也不利于水面舰艇实施上述规避策略。因此,水面舰艇在通过敌潜艇威胁区时有必要采取曲折机动,这种机动方式经长期战争实践已证实有利于防御潜射直航和自导鱼雷攻击,在对抗现代的线导鱼雷攻击中还可迫使敌潜艇只能以现在方位法导引鱼雷。然而水面舰艇在高速规避线导鱼雷过程中不应再实施曲折机动,除非确认本舰已走出潜艇声纳探测范围,否则会降低本舰相对鱼雷的逃离速度。
3 结束语
水面舰艇纯机动规避线导鱼雷最明显的效果就是延缓鱼雷的命中时间,但无法根除鱼雷威胁。在纯机动规避分析原理的基础上,需进一步加强规避机动与软硬杀伤器材的综合运用研究,才能有效提高本舰的生存概率。
[1]袁志勇,周浩,吴茂林.鱼雷最大航向估计在反鱼雷中的应用[J].海军工程大学学报,2004,16(2):20-23.
[2]高东华,章新华.舰艇规避策略对鱼雷捕获概率影响的仿真研究[J].系统仿真学报,2001,13(3):348-349.
[3]陈颜辉,孙振新.水面舰艇纯机动规避尾流自导鱼雷方法[J].鱼雷技术,2010,18(1):68-71.
[4]陈皓亮,夏志军,章新华,等.舰艇回转规避尾流自导鱼雷仿真研究[J].舰船科学技术,2008,30(4):168-171.
[5]陈春玉,张静远,王明洲.反鱼雷技术[M].北京:国防工业出版社,2006.
[6]赵正业.潜艇火控原理[M].北京:国防工业出版社,2003.
[7]潘新祥,陈颜辉.水面舰艇规避线导鱼雷策略[J].舰船科学技术,2011,33(11):100-103.
[8]张宇文.鱼雷弹道与弹道设计[M].西安:西北工业大学出版社,1999.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
智能计算机与应用(2021年5期)2021-10-05
新世纪智能(高一语文)(2021年3期)2021-07-16
舰船电子工程(2021年6期)2021-06-28
民用飞机设计与研究(2019年4期)2019-05-21
兵器知识(2017年10期)2017-10-19
军事运筹与系统工程(2017年1期)2017-07-31
电子制作(2017年24期)2017-02-02
兵器装备工程学报(2016年12期)2017-01-07
水下无人系统学报(2016年3期)2016-10-13
