
基于Prescan软件的行人检测仿真*
2013-08-21 11:49董永坤王春香
交通信息与安全 2013年5期
董永坤 王春香 杨 明
(1.上海交通大学机械与动力工程学院 上海200240;2.上海交通大学电子信息与电气工程学院 上海200240)
0 引 言
我国平均每年有10万以上的人死于交通事故[1],所以行人安全问题日趋重要。基于计算机视觉的行人检测由于其在汽车主动安全驾驶系统中的重要实用意义成为当前计算机视觉和智能车辆领域最为活跃的研究课题之一。但是由于行人的衣服颜色和走动姿态随机性很强,所以对行人检测算法的鲁棒性要求很高,并且图像处理的运算量比较大,实时性也是目前行人检测技术发展的一大障碍。
目前典型的行人检测系统一般包含2大模块:感兴趣区域分割和目标识别。感兴趣区域的分割就为了确定包含待检测目标的窗口区域,这样在目标识别过程中就不必遍历整个图像坐标系,同时可以提高行人检测算法的速度和实时性。常用的兴趣区域分割的方法包括基于距离、基于运动、基于图像特征和基于摄像机参数。基于距离的即根据目标到车辆的距离来分割物体,常用传感器有雷达和立体视觉,基于运动的即检测场景中的运动目标,但无法检测静止的行人,基于特征的方法不需要额外的传感器,而是根据目标的边缘,熵和纹理信息来判断是否是行人区域,基于摄相机参数即根据其安装位置和参数,对行人出现在图像中的位置和大小进行筛选,但其标定结果会受车体震动的影响。目标识别是行人检测的核心环节,包括根据行人运动步态的识别和根据行人边缘、纹理等形状信息的识别[2]。
目前许多行人检测算法使用单一摄像头传感器,存在数据量少、算法复杂的缺陷,本文使用融合雷达和摄像头数据的方法,将雷达数据进行聚类,将聚类得到的目标位置信息根据联合标定的结果投影到图像坐标系,以此作为兴趣区域。然后对兴趣区域进行对称度、腿部垂直边缘统计和基于Hausdorff距离的模板匹配的分析处理,来判断是否为行人区域。
本文的交通环境,行人和车辆,以及车载传感器均在Prescan软件环境下进行建模仿真。Prescan是一款功能丰富的交通仿真软件,提供了多种交通环境中出现的模型以及各种能仿真传感器数据的传感器模型,可搭建常见的路况和建筑,该软件核心的计算和仿真部分是在simulink中完成的,整个搭建的模型以在simulink中可视并且实时仿真。本文利用simulink自定以模块添加了自己编写的行人检测模块,放到已经搭建的模型中,这样就可以在实时的仿真过程中检测行人检测算法的鲁棒性,相比较于真实交通场景中的实验检测不仅节省了时间和投入,更具有安全性。
1 传感器联合标定
融合2种传感器数据的基础是对它们各自坐标进行联合标定。对于摄像机针孔成像线性模型,图像坐标和车辆坐标系的关系可以表述如下。

式中:[uv1]T为图像齐次坐标,[XwYwZw1]T为车辆坐标系中的齐次坐标,通过标定即可得到坐标变换的投影矩阵。只要得到雷达坐标系到车辆坐标系的变换关系即可得到2传感器的坐标变换,三者关系见图1。

图1 坐标变换关系Fig.1 Coordinate transformation
本文中将雷达安置在车辆坐标系原点正上方,高度为h,则雷达坐标系与车辆坐标系关系如下

这样通过这个标定过程就可以把雷达的坐标系和图像坐标系通过一个投影变换矩阵联系起来
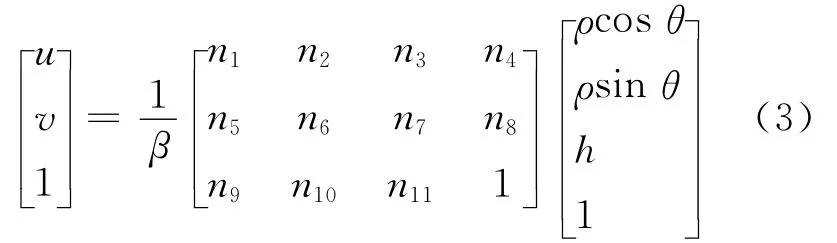
通过标定即可求解式中的投影矩阵参数,这样就实现了2种传感器空间上的同步,由于2种传感器的采集频率不一定一致,还需要做时间上的同步,即通过航位推算[4]来抵消时间上不同步的误差。
2 传感器数据处理
传感器联合标定,就是为了充分融合各自所包含数据信息的优势,雷达数据可获取深度信息,可实现聚类以提取兴趣区域,将兴趣区域投影到图像坐标系中后,则可以利用图像信息丰富的特点来做行人检测。
2.1 雷达数据聚类
激光雷达数据见图2。
由图2可见,距离相近的点就可以聚类为一个物体,这样雷达数据就可以划分为代表一个个物体的点簇。根据图3可以得到计算公式[4]:
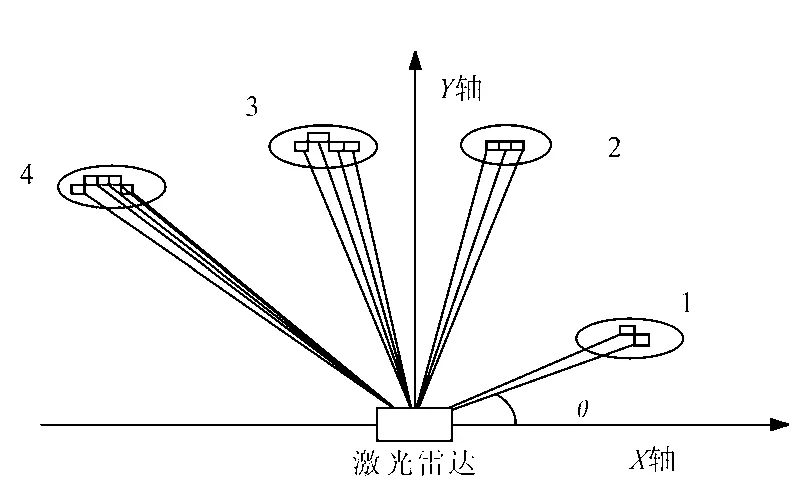
图2 激光雷达数据Fig.2 Data of laser scanner

图3 计算原理图Fig.3 Cauculation description

式中:rk为雷达的第k个数据;φ为雷达的角度分辨率;f即是相邻2数据点的距离,可以看出相邻量数据点距离越大,计算得到的β就越大,这样可以根据实验结果设定一个阈值,当β大于该阈值则认为这2个数据点属于同一个物体,反之亦然。这样通过这种聚类的方式实现了对雷达数据的聚类。并根据雷达的距离和角度计算得到每个物体的边界位置和中心位置的二位全局坐标信息。
2.2 摄像头数据处理
聚类之后得到了每个物体左右边界的二维坐标信息(x1,y1)和(x2,y2),假设物体高度为2m,把(x1,y1,0)和(x2,y2,2)分别根据式(3)确定的投影关系投影到图像坐标系即可得到该物体在图像中的矩形框范围,从而确定兴趣区域,见图4。

图4 兴趣区域结果Fig.4 Results of ROI
根据得到的兴趣区域便可以进行进一步的处理,包括对称度分析和垂直边缘统计、高宽比和基于Hausdorff距离的模板匹配,根据结果来判定目标区域是否属于行人。行人一般具有很强的对称度特征,并且人体的腿部具有丰富的垂直边缘,对各种行人进行对称度分析和垂直边缘统计结果如图所示,可以看出人体具有很好的对称度和腿部垂直边缘,见图5。

图5 对称度和垂直边缘分析Fig.5 Analyses of symmetry and vertical edge
2.2.1 Hausdorff距离的模板匹配
Hausdorff距离是描述2组点集之间相似程度的一种度量,它是点集之间距离的一种定义方式[3],假设有2组点集A={a1,a2…,an}和B={b1,b2…,bn},则2组点集之间的 Hausdorff距离定义为


其中:‖·‖为定义的A和B2点集间的一种距离范数。
前面只是给出了Hausdorff距离的数学定义,具体到图像模板匹配的应用上,可以针对提取边缘后的二值图像来进行,把边缘点当作点集,计算出模板和带匹配图像的边缘点之间的距离,以此作为相似度的度量。
2.2.2 Hausdorff距离的改进
虽然按定义进行的Hausdorff的可以对模板和图像进行匹配,但是它的缺点也很明显,首先对有向的距离h(A,B)只是去所有点的距离中的最大值,这样容易受到噪声的干扰,鲁棒性并不好,并且对于一个模板要遍历图像来寻找匹配区域时,要反复计算模板的每个点和当前匹配区域的点的距离的最小值,这是一个很大的计算量,严重影响了算法的实时性。所以针对以上2点本文使用改进和加速的Hausdorff距离算法。
首先对于有向距离h(A,B)不仅是取所有点距离的最大值而是去平均值,这样就提高了算法的鲁棒性

式中:I为带匹配图像;M为模板;k为I中所有点的个数。
对于I每个点都要求取M中和它距离最小的点,并且模板还要遍历图像,计算量也很大,所以本文对模板进行距离变换,得到原边缘图像等尺寸的距离映射图,每个点的值为它距离最近的边缘点的距离值,如果该点是边缘点则其值为0,距离变换定义:

式中:dM(p,q)为p、q2点之间的距离;O为图像中所有的边缘点集合[3]。

图6 距离变换示意图Fig.6 Diagram of distance transform
本文根据行人下半身姿态比上半身相对稳定的特点使用行人的上身模板对行人进行匹配,对模板距离变换并匹配的结果见图7。
3 Prescan中建模和仿真

图7 Hausdorff距离匹配结果Fig.7 Results of temple matching
对于行人检测算法的实验问题不仅要考虑有效性真实性和成本还要考虑安全性,真实交通场景实验有一定的危险性,并且不容易找点典型的场景。PRESCAN就提供了一个交通仿真的平台该软件中提供了丰富的交通建模的模块,包括各种路口、可定自已曲率和通道数目的道路和高架等,还有各种姿态的行人和车辆,并且可以对车辆进行详细的动力学参数定义和道路轨迹设定,其次也有用于实现主动安全系统的各种传感器和相应的标定板,以及方便GUI建模界面,见图8。软件核心仿真过程是在Simulink中完成的,用户可以在Simulink中对该模型进行相应的编辑和控制,其中行人检测算法的模块就需要在Simulink模型中添加。

图8 GUI建模效果图Fig.8 Show of GUI
本文针对行人检测进行建模后,对车辆搭载相应的传感器并完成相应的联合标定,并添加行人的算法模块后,进行仿真结果见图9。


图9 建模和检测效果图Fig.9 Modeling and results of detection
4 结束语
本文提出了一种基于多传感器融合和Hausdorff距离匹配的行人检测算法,并通过在PRESCAN仿真平台中建模,验证了该算法的良好的检测效果。但是由于行人各种着装和附属物的复杂性和姿态的多变性,单一的模板匹配并不能完全满足实际主动安全系统的鲁棒性要求,以后的工作还要进一步完善对各种姿态行人检测算法的性能。
[1] 贾慧星,章毓晋.车辆辅助驾驶系统中基于计算机视觉的行人检测研究综述[J].自动化学报.2007,33(1):84-90.
[2] 刘 强,陆化普.我国道路交通事故特征分析与对策研究[J].中国安全科学学报,2006,16(6):123-128.
[3] 邱志敏,李 军.基于Hausdorff距离的自动目标识别算法研究[J].红外技术,2006,28(4):199-202.
[4] 钱慧佳,杨 明,王春香,等.一种基于激光雷达和视觉的行人检测方法[J].上海交通大学学报,2010,44(7):946-949.
[5] 刘大学,戴 斌,李 政,等.一种单线激光雷达和可见光摄像机的标定方法[J].华中科技大学学报:自然科学版,2008,36(S1):68-71.
[6] Cur io C,Edelbrunner J,Kalinker T,et al.Walking pedestrian r ecognition[J].IEEE Transa ctions on Intelligent Tr anspor tation Systems,2000(3):155-163.
[7] 蔡 果,刘江鸿,杨降勇,等.城市道路交通中行人安全问题研究[J].华北科技学院学报,2005,2(4):60-65.
[8] 邱茂林,马颂德,李 毅.计算机视觉中摄像机定标综述[J].自动化学报,2000,26(1):43-55.
[9] 郭 烈,王荣本,顾柏园,等.世界智能车辆行人检测技术综述[J].公路交通科技,2005,22(11):133-137.
[10] 魏福禄,曲昭伟,江 晟,等.基于多源信息融合的行人检测实时性方法研究[J].交通信息与安全,2012,30(30):43-45.
猜你喜欢
意林(2021年5期)2021-04-18
汽车维修与保养(2020年11期)2020-06-09
扬子江(2019年1期)2019-03-08
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中国惯性技术学报(2017年1期)2017-06-09
小天使·一年级语数英综合(2017年6期)2017-06-07
中等数学(2017年2期)2017-06-01
光学精密工程(2016年3期)2016-11-07
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
