
舰船水下维修现状及发展趋势
2013-08-21 13:28:38朱晓军闵少松
中国修船 2013年3期
朱晓军,闵少松,张 涛
(海军工程大学,湖北武汉 430033)
通常情况下,舰船水下部分维修需到具有与舰船吨位和尺度相当的坞中或排上进行,由于进出坞和上下排前舰船都需要一定的准备时间,因此,舰船坞 (排)修一般都需要一个较长的周期,这是导致舰船实际在航率偏低和维修费用偏高的一个重要原因[1]。水下维修能在一定程度上缓解舰船水下部分维修需求对坞排设施的依赖,使其在不进坞而恢复原有的技术状态。水下维修指在水中对舰船设备或结构进行清洗、检测和修理更换的一种维修活动。本文主要介绍水下维修的国内外水下维修的现状以及水下维修技术的发展趋势等内容。
1 国内外水下维修现状
长期以来,国内外对舰船的水下维修进行着不懈的研究探索,取得了长足的进步和较大的突破。从肉眼进行水下检测发展到运用光、声、电等仪器设备进行水下检测,如水下摄像检测、水下超声波测厚和水下磁粉探伤等;从潜水员实施水下维修操作发展到利用水下维修平台和水下遥控机器人等装置实施水下维修的操作。下面简要叙述国内外水下维修技术应用的现状、水下修理的应用范围及其带来的经济效益。
1.1 国外水下维修现状
美国海军一直非常重视舰船的水下维修,设有专业的水下维修机构,专门负责舰船的水下维修(舰船清洗和修理),还设有专门的水下维修研究机构,以开展舰船水下维修技术的研究和水下维修人员的技术培训等。从美海军水下维修的作业方式来看,其水下维修主要依赖2种平台:水下维修舱和水下维修机器人平台。美国海军的几个修船厂都存储有大量针对不同类型舰船和同一型舰船不同水下部位的修理舱 (又称为修理潜水箱、沉箱),图1为一个维修船体的水下维修舱实图及示意图,维修舱与船体贴紧后排水,在水下形成一个局部的干式维修空间,进行相应部位的维修作业,包括船体维修和钢板及构架的更换,推进器、艉轴管、舵、减摇鳍的修理更换,声呐导流罩的维修等等。
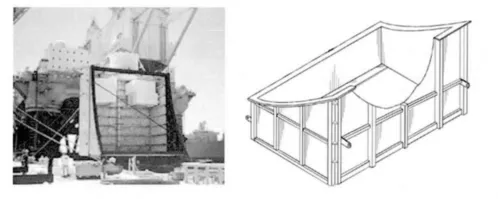
图1 美国海军用于舰船船体维修的水下维修舱
利用水下维修舱实施维修,可对船体水下局部区域进行较快的检测、清洗、修理和更换,然而,对于船底大面积的污底清洗,则因船体型线不同而需经常更换维修舱,清洗效率较低,需要专门的清洗装置来实施污底清洗。为了提高清洗工作的效率,美军一直致力于高效污底清洗装置的研究研制,其清洗装置的发展大致经历了3个阶段[2]:手工操持阶段、机械操持阶段和遥控机械或机器人自主作业阶段。第一种方式基本是由潜水员手持转刷,利用操作人员施加外力及转刷产生的负压使之紧贴船体,对船底污底进行清洗;第二种方式利用各种喷射式清刷装置如高压水喷射装置进行污底清洗;第三种方式利用机器人的吸附和移动功能,使用机器人本体上携带的高压水枪、转刷等进行清洗作业。第三种装置的清洗效率最高,是美军重点研究和发展的方向,如美国海军水面舰船中心成功研制的自动水下船体清洗维修车[3]就属于这种类型,该装置由水面操作控制,无需潜水员,进行污底清刷工作主要依赖旋转刷、高压水枪和声震动3种方式;该平台上还装有涂层厚度探测器和电位的探测器等传感器,配备的摄像机可以拍摄水下静态照片和录像,这些传感和摄像设备可以进行舰船检查和辅助维修计划的制定。
英国的水下维修国际公司 (UMC)一直从事舰船的水下检测维护和修理,是全球水下维修技术的领先者,是美国、英国、澳大利亚、法国和意大利等国家海军舰船水下维护服务的提供商和水下检测、维修设备的供应商。UMC能够在水下更换修理舰船大多数水下设备,图2是UMC公司为英国海军更换修理稳定翼。
比利时Hydrex公司是向船主提供广泛的水下清洗和维修服务的领头国际公司之一,它的理念是干船坞并非船舶修理的必须设施,许多船体的清洗和维修工作可以在原位完成;该公司的服务包括船舶外部水下设备和机器的大修和更换,推进器、螺旋桨、舵、轴管套、破损和腐蚀船体等其它外部设备的水下清理工作由其专业团队完成;工作方式主要由潜水员在水下操纵各种工具进行维修或清理,属于人工半自动性质。该公司开发了一种名叫WPS的焊条,实现了水下湿式焊接焊缝质量的突破,图3所示为Hydrex焊工正在进行水下焊接修理。另外,Hydrex公司通过制造一个水下干燥环境进行推进器的修理和更换工作,类似于美军的水下维修舱。Hydrex公司的水下船体清理系统利用各种液压驱动设备去清除船体污底,同时避免破坏船体上的涂层,其清刷装置配备有3个刷头和使机器贴在船体上的可调控的压力系统 (见图4),该装置每小时可清刷约800 m2船体。

图2 水下更换修理稳定翼
图3 水下湿式焊接

图4 Hydrex公司的清刷机器
另外,日本、法国和丹麦等均对水下维修技术进行了深入的研究和探索,他们都致力于船舶水下部分的高效检测、清洗和修理更换的研究工作。
可以看出,目前国外对舰船实施水下维修作业主要有3种方式:水下湿式维修作业、制造水下局部干空间实施维修作业和利用水下机器人平台实施维修作业。在这3种方式下,目前能完成的水下维修作业如表1所示。从表1可以看出,舰船在干船坞中的大部分工作都能被水下维修所代替,为延长舰船进坞修理间隔提供了基础,如上世纪90年代,美军舰船进坞修理间隔从3年延长到5年以上,显著提高了其舰船的在航率。
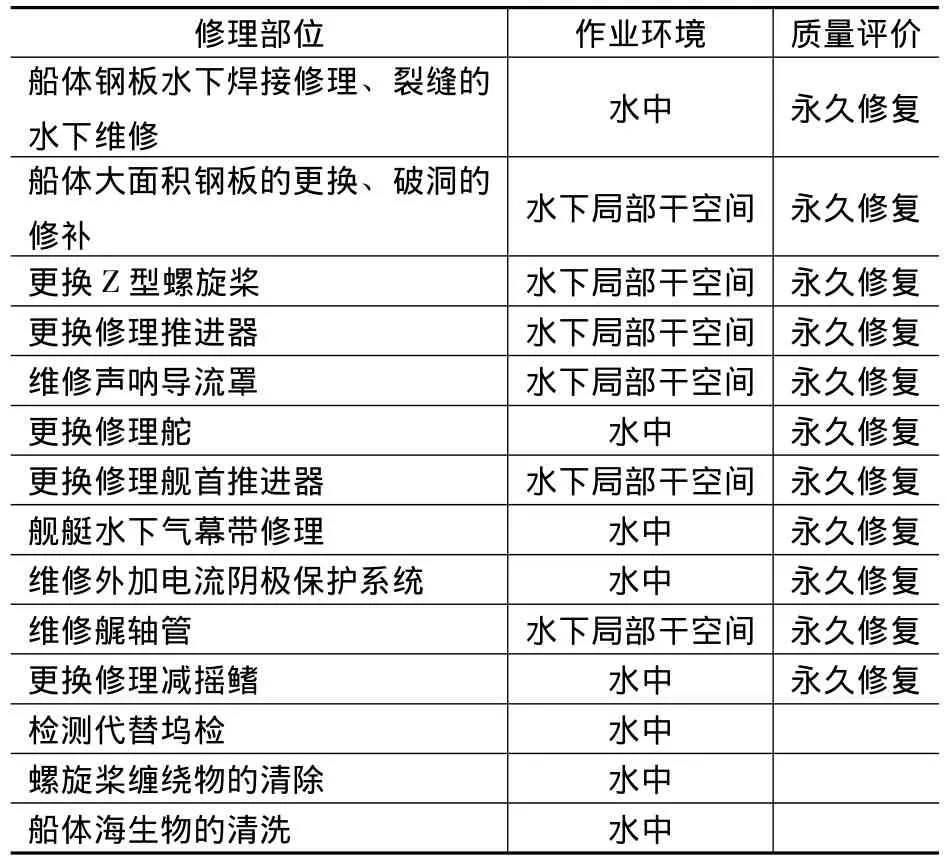
表1 国外舰船水下维修的范围、作业环境及修理质量
另外,在海上或在靠码头情况下对舰船实施水下维修,与在干船坞里修理相比更为经济。表2是1992年6月美国海军时报所刊“水下维修与干船坞修理费用对比表”,可以看出,使用水下维修具有重大的经济意义。

表2 水下维修与干船坞修理费用对比表
1.2 国内水下维修现状
受效益最大化思想的推动,国内民用船舶行业中水下清洗技术发展较快。我国沿海地区在最近几年内相继成立了多家水下工程服务公司,水下维修人员都有交通部颁发的潜水员证书。“船舶水下工程检测维修”许可证书。有的企业还获得美国、挪威、法国等船级社的认证。这些公司的业务包括水下观察、检测、清洗和简单的修理,能够对船舶进行水下船体海生物的清理,水下电焊抢修,海底门、艉轴管、排水口的水下封堵、螺旋桨缠绕物水下清除、水下摄影录像、船体探伤、船舶水下检验等作业。
目前国内的水下维修公司大多采用进口设备,采用人工半自动操作方式,而国内船体污底清洗机器人装置还处于样机研究阶段,如哈尔滨工程大学研制的水下船体清刷机器人样机[4]。该机器人用于清洗水下部分船体表面附着的贝类和藻类生物等,它通过永磁体双履带吸附在船体表面,机器人既可自主作业,又可进行人工操控作业,但这类清洗装置的吸附履带在船底曲率变化较大区域的作业能力还有待进一步提升。
总的来说,目前国内民用水下维修技术主要应用于民用船舶和海洋结构物的维修,在军用舰船的水下维修中应用较少。军用舰船同民用船舶相比,船底型线更加复杂、水下附属装置检修时的安全要求更高。因此,军用舰船的水下维修是一个较民船水下维修更为复杂的活动,需要综合考虑船体型线及结构的特点、水下维修对水线以下附属装置及船体的影响、船体及水线以下附属装置技术性能要求对水下维修的要求,尚需进行有针对性的修理方案研究和样机研制。
2 水下维修发展趋势及关键技术
水下湿式焊接通常被用于应急抢修,用于紧急情况下水下船体的裂缝和小面积破损船体的修复,对于水下作业人员和水下焊接装置及焊材的要求较高。为了降低维修作业的门槛和提高维修作业的效率,未来,对于水下船体大面积的换板修理和水下装置的修理更换将会更多地采用水下维修舱实施;而对于水线以下的污底清洗和大面积的船体外板状态检测将会采用水下维修机器人平台实施。对于水下维修舱和水下维修机器人平台,国外已经逐步应用并在继续进行深入探索,对我军而言,目前还处于起步阶段。因此,我国海军未来舰船水下维修发展的重点将会是水下维修舱和水下维修多功能机器人平台的研究研制。
2.1 水下维修舱发展趋势及关键技术
根据美军水下维修舱的特点可知,对于某一维修舱而言,通常只能附着于某一特定舰型的某一特定区域。因此,海军若想对现役舰船实施水下维修,必须制造大量的水下维修舱,如果对一艘舰船进行一次从艏至艉的水下维修,则会用到许多水下维修舱,如果舰船远离岸基,则可以想象这种水下维修的开展是相当困难的。因此,今后水下维修舱的发展趋势将会是增加其对舰船外形的适应性,研制自适应舰船型线的水下维修舱,尽量减少一条舰船所需水下维修舱的数量,这就需要对现役舰船的型线进行分析和归类,研究水下维修舱同舰船附着边沿自适应的设计方案。另外,水下维修舱附着力获取方式的研究也是十分重要,还要研究在远离岸基且有风浪影响情况下水下维修舱附着的稳定性。
2.2 水下维修机器人平台的发展趋势及关键技术
舰船水下维修机器人平台的主要工作任务是船体污底清洗和船体外板及各种水下附属装置的性能检测。美军虽已设计出自动水下船体清洗维修车,但是该平台的设计方案和应用却鲜见报道,我军要研制出这类水下作业平台还需靠自身努力,因而有许多关键技术需要解决,主要包括平台吸附、平台贴船体运动的路径规划、污底清洗、船体外板检测勘验、附属装置检测和模块化设计、平台的水下的姿态控制、检测数据传输和处理等多项关键技术。这里仅叙述舰船水下维修机器人平台对吸附技术和模块化技术的要求。
1)平台吸附技术。水下维修机器人平台在水下的运动方式主要有2种:船体附近自由运动和水下船体的爬壁运动,其中平台的水下船体爬壁运动最为复杂,涉及到平台的吸附技术。总体来看,爬壁机器人吸附方式有负压吸附、真空吸附、磁吸附、推力吸附等几类[5]。负压及真空吸附方式具有不受壁面材料限制、适用范围广等特点。但当壁面凹凸不平时,吸盘容易发生气体泄漏,导致吸附力不足,减小爬壁机器人的承载能力,甚至使爬壁机器人从壁面跌落;磁吸附有永磁和电磁两种方式,但要求壁面必须是导磁材料,产生的吸附力远大于负压和真空吸附,也不存在漏气现象,对凹凸不平壁面的适应性较强;推力吸附法是一种新型的吸附方式,与真空吸附和磁吸附相比,在壁面移动机器人的载体方面有了很大的创新。它不是依靠吸力而是使用螺旋桨产生合适的推力,使机器人稳定可靠地吸附在壁面上。由于推力能始终指向壁面,机器人可容易地实现越障而适应于各种情况的壁面。
由于船体水下部分尤其是尾部水下部分曲率变化较大,采用负压及真空吸附法不太合适,而采用磁吸附又有可能会引起舰船结构及设备的磁化,另外,磁力吸附要求机器人始终贴紧船体才能运动,机器人从船体一点运动到另一点开始工作时,由于磁力机器人移动较慢,因而影响工作效率。而推力吸附技术因为其对壁面适应性强、不会产生磁化影响和运动速度快将是未来水下维修机器人的发展方向。如前所述,推力吸附技术主要采用螺旋桨产生合适的推力来使机器人本体贴近船体壁面,因此,螺旋桨在机械本体上的布置以及其功率的选择是关键,需充分考虑机械本体上功能部件如清洗转刷工作时所产生的反作用力、波浪冲击力和机械本体自身重力等因素的影响,需要经过深入研究分析和试验方能确定。
2)模块化设计技术[6]。未来水下维修机器人平台将承担多种维修任务,不同的任务可能需要不同的功能部件,若将所有的功能部件都安装在平台上,势必会增加平台的自重和尺寸,给平台的吸附、运动控制和准确定位都会带来不利的影响。因此,将功能部件按照模块化的思路进行设计将是未来水下维修平台的一个发展趋势,执行任务前,根据不同的任务需求安装不同的功能模块,不仅可以减少自重、增加运动的可控性,还能提高工作的效率和准确性。因此,模块化设计技术将是未来水下维修机器人平台的关键技术之一,需要综合考虑各种模块的物理接口和数据传输接口等要求。
3 水下维修推广应用前景
水下维修具有如下推广应用前景。
1)为船体水下维修方案的制定提供依据。利用水下维修机器人平台进行船体检测勘验,根据检测结果确定船体污底水下清洗的时机和清洗设备,确定船体水下附属装置及船体应采用的修理手段,做到维修工作有的放矢,维修设备做到“对症取材”,提高维修质量,节约维修时间和维修经费。
2)为维修方式的改革提供基础。通过水下维修机器人平台进行无损检测,掌握舰船水下部分的技术状态,有针对性地展开维修,实现由“定时维修”向“视情维修”和“以可靠性为中心的维修”转变[7]。如通过水下检测掌握船体水下部分的强度、腐蚀情况、牺牲阳极等装置的技术状态等,并根据检测结果确定是否需要修补或应该采取的维修方式等。
3)为延长进坞修理间隔时间提供保障。目前国外发达国家海军水下维修基本可以完成船体污底清洗、船体水下检测、水下部件修理更换等需要干船坞的维修工作,因此,这些国家舰船的进坞修理间隔时间就相对较长,如美军核动力航母的进坞修理间隔从以前的5年左右延长到了现在的9年左右,水下维修便是这一间隔延长的重要保障之一,随着坞修间隔的延长,其航母的在航率也相应提高,因而在其航母总数不断减少的情况下,航母仍能满足其国家战略的使用需求。所以,若在我海军大力发展水下维修,则会减少舰船全寿命周期内的厂修时间,提高舰船的在航率。
4 结束语
水下维修指在水中对舰船设备或结构进行清洗、检测和修理更换的一种维修活动,目前舰船实施水下维修主要有3种方式:水下湿式维修作业、制造水下局部干空间实施维修作业和利用水下机器人平台实施维修作业,后2种方式是未来水下维修的主要发展方向,其中水下维修舱将来会逐渐向对船体型表面适应性强的方向发展,而水下清洗装置将会逐渐向清洗与检测勘验集成的多功能水下维修机器人平台发展。
对舰船实施水下维修可以代替坞修中的许多工作,能在确保装备技术状态完好的前提下延长坞修间隔,从而提高舰船的在航率和节约维修经费,具有重要的军事和经济意义。
[1]朱志洁,朱晓军,王政.破损舰船进坞过程虚拟仿真研究 [J].船海工程,2007,36(2):87-89.
[2]郦智斌,龙彪.船舶水下清洗技术研究 [J].中国修船,2011,24(5):33-36.
[3]任达生.新型遥控船体水下清洗装置 [J].中国修船,1999(6):10.
[4]孟庆鑫,王丽慧,王立权.水下船体表面清刷机器人方案研究 [J].船舶工程,2002(1):44-46.
[5]王丽慧.水下船体表面清刷机器人及相关技术研究[D].哈尔滨:哈尔滨工程大学,2002.
[6]季东军.模块化水下机器人及其故障诊断研究 [D].哈尔滨:哈尔滨工程大学,2008.
[7]王小伟,张文瑶.无损检测技术及其在舰船水下维修中的应用 [J].中国修船,2004(1):41-42.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:10
舰船科学技术(2022年20期)2022-11-28 08:19:52
北京航空航天大学学报(2022年7期)2022-08-06 07:28:32
舰船科学技术(2021年12期)2021-03-29 01:28:44
浙江大学学报(工学版)(2016年11期)2016-06-05 09:21:07
舰船科学技术(2016年1期)2016-02-27 15:39:26
焊接(2015年9期)2015-07-18 11:03:51
海军医学杂志(2015年2期)2015-02-27 13:47:42
中国舰船研究(2014年6期)2014-05-14 06:45:17
振动工程学报(2014年4期)2014-03-01 01:15:37
