污染气团扫描式FTIR被动遥测系统
2013-08-17 10:47高闽光童晶晶魏秀丽
激光与红外 2013年9期
焦 洋,徐 亮,高闽光,金 岭,童晶晶,李 胜,魏秀丽
(中国科学院安徽光学精密机械研究所,中国科学院环境光学与技术重点实验室,安徽合肥230031)
1 引言
傅里叶变换红外光谱遥测技术(FTIR)是近年来迅速发展起来的一种综合性探测技术,因其无需采集样品、高灵敏度和高分辨率而广泛应用在污染气体远程定量探测中[1]。随着突发性污染事故的危害日趋增大,为了提高应对能力,对污染气团的分布和扩散态势探测的需求日趋增强。但目前FTIR被动遥测多见于点探测应用[2],采集范围仅限于探测器固定视场大小,无法对区域性污染气团的分布情况进行有效探测。因此将FTIR被动遥测装置与可见光采集装置和二维扫描装置相结合,期望通过将被动遥测装置获取的浓度数据与二维扫描装置的位置分布参数结合生成污染气团的浓度二维分布数据,并最终获得浓度分布伪彩色图与可见光背景的融合图。该系统主要应用于污染事故的应急监测,所以要求系统运行稳定,结果输出迅速准确,便于为后续应对决策部分提供依据。
2 FTIR被动扫描遥测原理
在使用FTIR技术对污染气团进行被动扫描遥测时,首先要进行点探测,反演出浓度结果,才能通过扫描获取二维浓度分布。在进行点探测时,可建立三层辐射模型,模型示意图如图1。
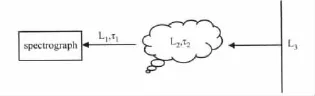
图1 被动遥测三层模型Fig.1 three layer model of passive remote sensing
第一层为污染气团到探测器之间的大气辐射,第二层为污染气团的辐射,第三层为背景(大地、植被、建筑物)的辐射。如果用L表示各层对下一层的辐射亮度贡献,用B表示各层自身温度对应的黑体辐射亮度,τ表示各层透过率,珋ν为对应的波数,下标数字表示层数。在该模型中,假设第二层中污染气团与周边大气环境处于热平衡时有B=B1=B2,待测气体浓度反演波段内第一层大气的透过率τ1≈1,可将三层大气模型简化为两层模型,则根据辐射传输原理,探测器通过第一层大气获取的总的辐射贡献可表示为:

根据式(1)可推导出污染气团透过率谱的表达式:

在式(2)中,L1(珋ν)可直接测得,要计算透过率谱,还需要获取背景辐射亮度L3)和等效于目标气体层温度的黑体辐射亮度B2)。常用的方法是用热电偶等温度探测器探测背景及目标气体层温度或对无污染气体区域背景层进行单独扫描,但这些方法无法满足系统应急响应的需求。本文采用了一种光谱实时提取算法,根据800~1200 cm-1波段自然背景的辐射特性和650~690 cm-1波段CO2的吸收累积效应,从测量光谱L1)中实时提取背景辐射亮度光谱和待测气体层辐射亮度光谱[3],利用一次遥测光谱生成透过率光谱,简化了测量步骤,提高了系统的响应速度。
获得透过率光谱后,可以使用Beer-Lambert定律对其进行反演获取污染气体的浓度。反演的基本原理是通过多次迭代运算,使得透过率光谱与通过标准数据库计算出的光谱之间有最小的均方差,表达式为:

为了将每个扫描点的浓度数据准确呈现在可见光背景图对应位置,可在远场放置特征目标,通过图像识别的方法检测特征目标随扫描装置角位移在图像中移动的像素数,从而建立二者的映射关系。
3 系统硬件构成和软件实现
3.1 系统硬件构成
遥测系统硬件如图3所示,由被动遥测装置、可见光装置、扫描装置与主控计算机相连接构成。被动遥测装置的望远镜口径230 mm,视场角为8 mrad,FTIR光谱仪分辨率1 cm-1,采集波段设置为4000~600 cm-1,系统噪声等效辐射通量密度NESR 为 5.3 ×10-9W/cm2·Sr·cm-1。可见光装置采用1/3 in感光面、15倍光学变焦的彩色CCD摄像机,装配时通过扫描远场高温黑体的方法与红外视场实现光轴平行校准。扫描装置的水平和竖直方向角分辨率分别为2.7×10-6rad和3.2×10-6rad,扫描范围为水平360°、俯仰±15°,可实时提供两个方向的角位移参数。经特征目标识别测试结果,扫描装置水平或竖直移动8 mrad,在1024×768像素的可见光图像中对应同方向上85个像素点的位移。

图2 (a)扫描成像式红外被动遥测系统;(b)系统结构图1-卡塞格伦式望远镜;2-CCD摄像头;3-FTIR光谱仪;4-扫描机构Fig.2 (a)scanning imaging passive remote sensing infrared system;(b)block diagram of the system 1-Cassegrain telescope;2-CCD camera;3-FTIR spectrometer;4-scan system
3.2 系统软件实现
遥测系统软件由自检模块、参数设置模块、数据采集模块,数据处理和保存模块组成。软件在Lab-VIEW环境下进行开发,利用LabVIEW特有的状态机技术结合队列技术构建了系统软件运行框架,各个功能模块功能独立开发,接口互通,设置了错误响应机制[4],实现了运行后不管功能,可用于无人值守或远程值守的检测系统。

图3 系统软件流程图Fig.3 block diagram of system
软件工作流程如图3所示:(1)对三部分装置进行自检;(2)设置FTIR光谱仪和可见光摄像机的采集参数,并在可见光图像界面中框选扫描范围,程序以扫描视场不重叠为原则自动规划扫描装置运行参数;(3)扫描装置带动系统运行至预定扫描点时采集光谱数据和可见光图像和位置参数;(4)根据采集到的数据生成气体浓度伪彩色分布融合图,同时将图片数据、浓度分布数据和位置信息以文件的方式存储。步骤(3)和(4)由队列技术控制运行[5],实现了扫描过程中浓度数据同步输出和伪彩色融合图动态更新。
系统采用的光谱仪在现有文献报道中只能通过OPUS软件来控制,这对于系统集成来说,是无法满足自定义控制和采集需求的。本系统通过在Lab-VIEW中调用了OPUS的动态链接库,获取其定义方式,实现了脱离OPUS运行环境对光谱仪进行控制。
4 实验及结果分析
系统集成后的人机界面如图4所示,所有设备通过统一界面进行控制。其中a部分为可见光摄像头实时显示界面,可在其中框选扫描范围;b部分为浓度伪彩色图与背景叠加显示界面;c部分为气体组分选择界面;d部分为运行参数设置界面;e部分为扫描点实时光谱图显示区域;f部分为浓度数据实时显示区域,为伪彩色图提供精确的数据参考值。
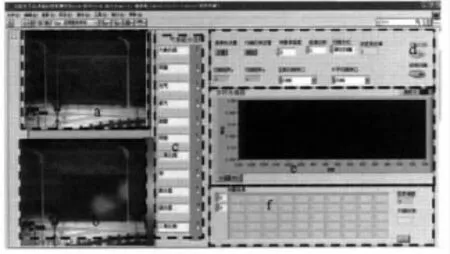
图4 系统的人机界面Fig.4 human machine interface of system
实验通过在距系统285m远处释放六氟化硫气体模拟污染气体突发泄露事件,视场背景中包含建筑物和植被。图5为软件界面中a部分截图,方框为手动选取的测量区域,系统自动规划扫描点数为9×4共36个,圆框为气体释放口位置。气体释放17 s后在扫描视场中检出六氟化硫成分。

图5 六氟化硫气体释放位置示意图(黑色方框为测量区域;黑色圆框为气体释放口)Fig.5 location of SF6release point signed by black circle and the measurement area signed by black pane
系统完成开始一帧9×4扫描点的测试运行时间为2 min,利用LabVIEW的“性能和内存信息”工具对软件进行分析,结果显示耗时主要在于光谱仪采集光谱过程和扫描机构从一个扫描点运行至下一扫描点的过程,前者每点耗时2 s,后者每次运行耗时1.3 s,数据处理时间小于0.2 s,在扫描装置移动过程中即可完成对上一扫描点数据的处理。所以若要获取更高实时性的污染气团分布数据,主要通过降低系统分辨率或使用更高速的光谱仪和二维扫描机构来实现。系统运行性能稳定,最长测试时间为连续运行8 h。使用了队列状态机结构的系统软件确保了数据采集和处理过程中不会产生数据处理过慢带来的数据溢出的问题,也不会产生数据采集过慢带来的浪费处理器等待时间的问题。
实验中某扫描点获取的谱线如图6所示,在波数947 cm 附近的吸收峰与六氟化硫吸收特征相符。根据式(2)和实时提取背景辐射亮度光谱和待测气体层辐射亮度光谱的算法计算了目标区域六氟化硫气体的透过率谱,并根据反演算法获得目标区域六氟化硫气体的浓度,反演波段选取为900~1000 cm-1。图为某点六氟化硫透过率谱、拟合谱及残差谱,如图所见拟合效果良好,残差值较小。
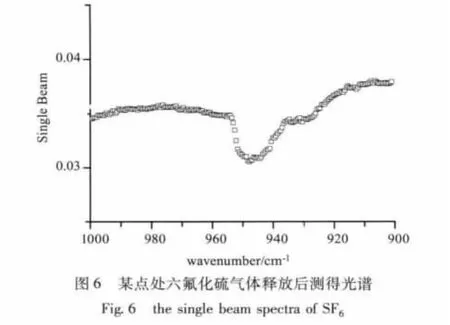
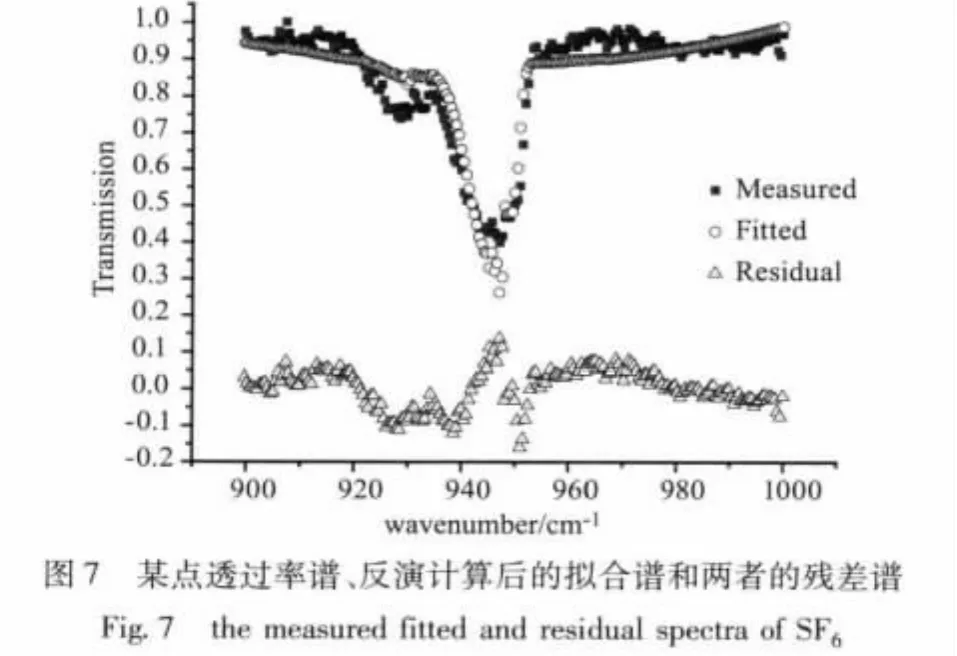
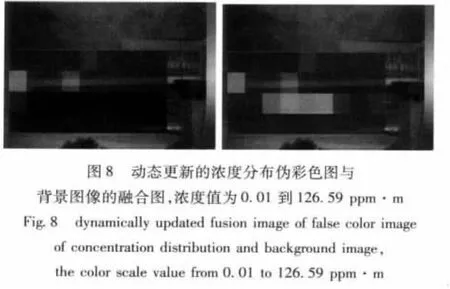
图8所示左图和右图分别为扫描过程中和一帧扫描结束后获得的浓度分布伪彩色图与背景图像的融合图,扫描过程中未扫部分以黑色半透显示,六氟化硫气团浓度范围为0.01到126.59 ppm·m。从融合图可以准确判读出六氟化硫浓度分布态势,符合气体泄露位置和现场风向,表明系统可有效应用于污染气团浓度分布检测。同时,从左右两幅图对比可见系统的动态刷新特性,该特性可提高污染气体泄漏实时检测和预警的响应速度,并为观测者提供更准确的判断依据。
5 结论
扫描式被动FTIR遥测系统通过将点探测光谱仪与二维扫描机构和可见光采集装置相结合,对系统各部分的精确控制,采集了光谱、可见光和空间位置信息,成功实现了对目标区域污染气团浓度分布态势的实时检测,并动态输出污染气团浓度分布与可见光背景伪彩色融合图。系统控制软件具有运行稳定,交互性好的特性。该系统在突发性气态污染事件快速应对方面有良好的应用前景,通过提高光谱仪和扫描机构的运行速度可进一步提高系统的运行时效。
[1] Zander R,Roland G,Delbouille L,et al.Column abundance and the long-term trend of hydrogen chloride(HC1)above the Jungfraujoch station[J].Journal of Atmospheric Chemistry,1987,5(4):395 -404.
[2] Gao Minguang,Liu Wenqing,Zhang Tianshu,et al.Passive remote sensing of VOC in atmosphere by FTIR spectrometry[J].Spectroscopy and Spectral Analysis,2005,25(7):1042 -1044.(in Chinese)高闽光,刘文清,张天舒,等.傅里叶变换红外光谱法被动遥测大气中VOC[J].光谱学与光谱分析,2005,25(7):1042-1044.
[3] Roland H,Gerhard M.Toxic cloud imaging by infrared spectrometry:a scanning FTIR system for identification and visualization[J].Analytical Chemistry and Technology,2001,5(1 -2):75 -90.
[4] Yang Leping.LabVIEW advanced programming[M].Beijing:Tsinghua University Press,2002.(in Chinese)杨乐平.LabVIEW高级程序设计[M].北京:清华大学出版社,2002.
[5] Ruan Qizhen.I and LabVIEW[M].Beijing:Beijing University of Aeronautics and Astronautics Press,2009.(in Chinese)阮奇桢.我和LabVIEW[M].北京:北京航空航天大学出版社,2009.
猜你喜欢
水利水电科技进展(2021年5期)2021-10-20
绿色环保建材(2020年10期)2020-09-28
生态环境学报(2019年4期)2019-05-31
科学与技术(2019年21期)2019-04-27
电子制作(2018年14期)2018-08-21
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年5期)2016-11-07
中国水能及电气化(2016年11期)2016-02-28
中国设备工程(2016年9期)2016-02-05
安徽工业大学学报(自然科学版)(2014年4期)2014-07-11