
激光枪自动射击系统的研究
2013-08-14 05:42黄丽华
河南科技 2013年14期
黄丽华 高 越
(南京农业大学 工学院,江苏 南京 210031)
1 系统方案
1.1 基本方案描述
本装置由两部分构成:激光打靶部分和图像采集部分。
激光打靶:利用ULN2003驱动步进电机,通过单片机控制两个步进电机转动带动激光笔上下,左右移动打靶。靶面图像由数字摄像头OV7620采集后经单片机处理,将结果显示在1602上。同时采用红外线遥控装置(代替了键盘)进行打靶控制和模式转换。

图一 激光打靶示意图
图像采集:靶面图像由数字摄像头OV7620采集后经另一片MSP430F149处理,将结果显示在1602上。
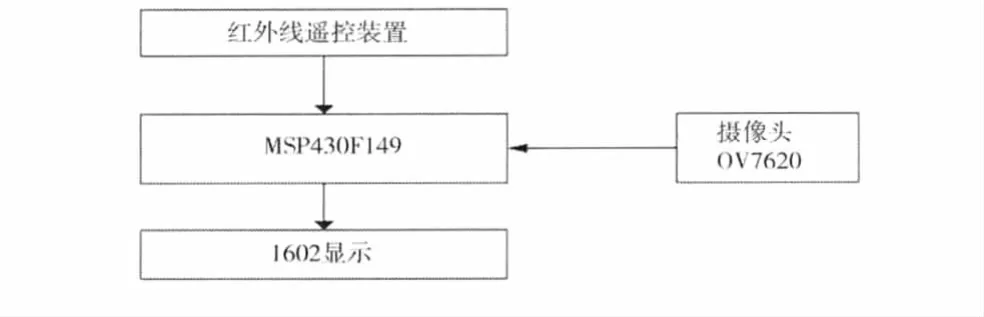
图二 图像采集示意图
1.2 各模块方案的比较与选择
(1)控制模块。采用TI公司的MSP430F149单片机为主控制芯片,该芯片有非常丰富的资源:6个8位并行口,其中两个有中断功能,12位的ADC,强大的定时器,精密的比较器,大容量的RAM和ROM,可存储大容量的程序。
(2)电机模块。选择步进电机作为驱动模块,步进电机是一种将电脉冲信号转换成相应的角位移(或线位移)的机电组件,它的转角与转速分别取决于脉冲信号的数量和频率。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点,使使得它可以达到很高的控制精度,且控制难度要比直流电机小得多。
(3)电机驱动模块。选择ULN2003作为电机驱动模块,ULN2003为极电极开路驱动芯片,配合步进电机使用。并且ULN2003的价格与常用的L298H相比较低。
(4)红外线接收及LCD交互模块。显示模块采用液晶1602,采用并口方式传输,简化软件设计,同时价格低廉。红外线接收装置采用VS1838,通过遥控器操控进行功能选择和激光笔的打靶控制。
(5)摄像头选择。摄像头选用OV7620,OV7620的是一个高度集成的高分辨率(640x480)的隔行/逐行扫描CMOS数码彩色/黑白摄像机芯片。数字视频端口支持60HZ的YCrCb4:2:2,16位/8位格式,ZV端口输出格式,RGB原始数据16Bit/8Bit输出格式和CCIR601/CCIR656格式。内置串行相机控制总线(SCCB的)接口提供了一种简单的方法控制内置摄像头功能。
2 理论分析与计算
2.1 射击位控制电路分析、计算
本设计中采用的是两个同种型号的四相步进电机,分别控制检测模块在水平方向和竖直方向上的旋转。由于步进电机应用于低速场合,需要加上减速装置来细分步数以提高定位精度并减少噪声。电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系,因此要想控制旋转的位置和速度必须先算出步进电机的步距角。步距角的算法如下:
当函数参数为2040时步进电机转4圈,则参数为1时步距角为
2.2 靶位检测电路分析、计算
由于MSP430F149的RAM过小,加之其主频最多8M,最终选择提取12*12的图像,首先通过串口调试摄像头。测得距靶的最优距离大约40厘米左右。同时测得红外线点的灰度值为所有点的最大值,中心的黑胶带灰度值为最小值。然后根据此灰度值计算出两点在数组中的位置,再根据40厘米的比例即可推算出环数及方位信息。
3 电路与程序设计
该部分主要由胸环靶的检测方法与程序设计及射击位的控制方法与程序设计组成,利用标准C编程,简单易懂。
4 测试结果及误差分析
4.1 弹着点检测
测试方法:通过摄像头识别激光枪投射在胸环靶上的弹着点光斑,并显示弹着点的环数与方位信息。
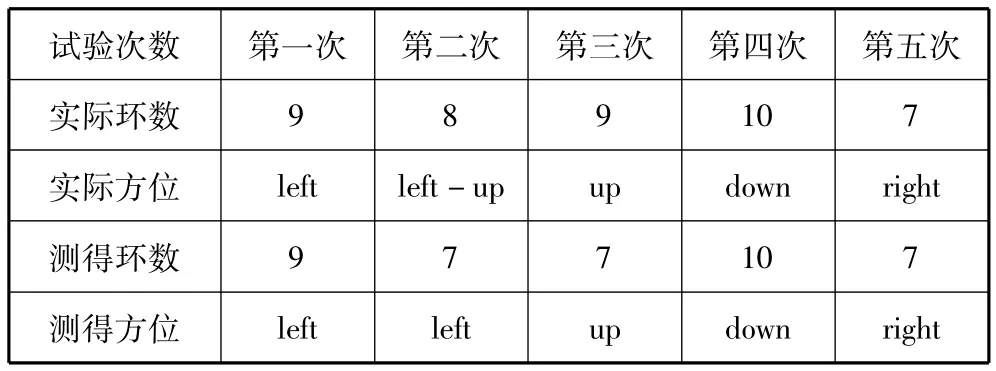
误差分析:外界光线及距离误差干扰。
4.2 10环打靶
测试方法:自动控制激光枪,在15秒内将激光束光斑从胸环靶上的指定位置迅速瞄准击中靶心(即10环区域)。
4.3 任意环数打靶
测试方法:可根据任意设定的环数,控制激光枪瞄准击中胸环靶上相应位置。
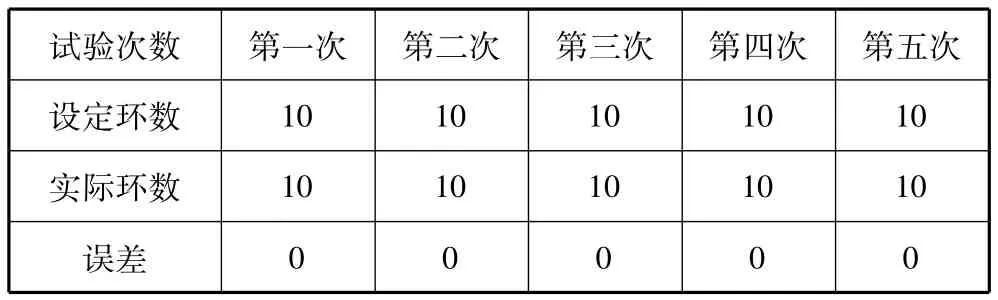
实验结果:由于内建坐标系,做到了精确置位。

?

实验结果:由于内建虚拟坐标,做到了超精确定位。
[1]董磊.基于MSP430F169的步进电机控制系统.吉林大学学报[J](信息科学版),2011.06
[2]华成英.《模拟电子技术基本教程》.清华大学出版社.2006
[3]谢楷.《MSP430系列单片机系统工程设计与实践》.机械工业出版社[J]2009.7
[4]OV7620数据手册
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
昆明医科大学学报(2021年6期)2021-07-31
锻压装备与制造技术(2021年2期)2021-07-19
科学(2020年5期)2020-11-26
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
小哥白尼(趣味科学)(2019年2期)2019-04-17
汽车维修与保养(2015年8期)2015-04-17
