
基于面向对象图像分析技术的围填海用海工程遥感监测
2013-08-14 01:20:44鞠明明汪闽张东谢伟军崔丹丹吕林朱瑞
海洋通报 2013年6期
鞠明明,汪闽,张东,谢伟军,崔丹丹,吕林,朱瑞
(1.南京师范大学 地理科学学院,江苏 南京 210046;2.江苏省海域使用动态监视监测中心,江苏 南京 210003)
江苏省是海洋大省,海岸带自然资源丰富。人类开发利用海岸带资源使当地的经济迅速增长。沿海地区人多地少,围填海成为缓解土地资源紧缺问题的重要途径,也是我国海岸开发利用的主要形式。大规模围填海工程改变了海岸带的自然属性,必然会引发海洋生态环境问题,这关系到当地社会经济的可持续发展,因此对围填海工程进行有效的监测与管理非常必要。
传统的对海岸带和海洋资源进行调查的方法是现场勘测,其缺点是耗费大量的人力和物力,且时效性差。遥感技术具有信息量丰富、效率高、范围广、多时相等特点,为此其已成为大范围海岸带调查的有力手段 (吴曙亮等,2003;陈书全,2009;许勇等,2010;张明慧等,2012)。例如,吴曙亮等(2003)使用遥感手段对江苏沿海滩涂资源进行了调查和解析,为开发滩涂资源给出合理化建议。吴泉源等(2006)利用多期遥感数据,提取了多时相龙口市海岸带土地利用信息,并分析了其动态变化情况。韩福伟等(2008)利用人机交互式解译方法,对辽宁省沿海海域多时相遥感影像进行了海域使用动态信息的提取,获取了该海域使用情况,等等。
近年来,高分辨率遥感在国土资源调查、环境监测与保护、军事及交通等各行业得到广泛应用。高分辨率遥感影像上所表达的地物信息更为丰富,地物的边界、形状、内部结构、表面纹理更为清晰,这为地表信息的精确提取提供了可能。问题在于过多的细节也带来了更为严重的光谱混淆现象,这对传统的基于像元光谱分析为基础的遥感信息提取技术提出了严峻挑战。
面向对象的遥感信息提取技术与基于像元的图像分析技术不同,它首先对遥感影像进行分割,得到同质影像对象(也称为特征基元,即提取特征,用于图像分析的基本单元)(Baatzetal,2000),并将基元光谱、形状、纹理,以及空间关系等众多特征纳入分析流程,最终实现对地物的信息提取。其技术优势在于,分割避免了基于像元图像分析方法的“椒盐效应”;且特征极为丰富,可有效提高后续分类的准确度(Zhang et al,2010;Li et al,2012)。面向对象图像分析技术的一个成功代表是美国天宝公司的eCognition软件系统,目前其最新版本号已发展到8.8(Trimble Inc.,2012)。
本文面向海域使用遥感监测的业务需求,以面向对象图像分析技术为技术支撑,发展了一整套围填海用海工程遥感监测的技术方法,开发了相应的软件系统,以之实现了围填海用海工程土地利用的自动分类、专题地物提取,以及工程进展的变化检测等功能。实践证明,本文所提出的技术方法充分利用了高分辨率遥感及面向对象图像分析技术的优势,具有自动化、精度高的特点,具备很强的实用性。
1 技术流程
针对江苏省围填海用海工程的实际情况,设计了图1所示的遥感信息自动提取的技术流程,其主要包括多精度图像分割及特征提取、面向对象分类及分类后变化检测3个主要步骤。首先,使用自主设计研发的多精度图像分割技术(汪闽 等,2010),对遥感图像进行多精度分割获得特征基元,并计算基元各种特征,为后面的分类提取服务。其次,采用基于样本的监督分类以及基于规则的专题地物分类技术,实现监测区域的多级专题地物分类。针对海域使用遥感动态监测的业务特点,本文设计了两级分类体系。一级分类以影像光谱为主导特征,采用监督分类区分水体、滩涂、植被、建设用地、未分类地五个类别。二级体系则是在一级体系基础上的进一步细分,通过一级分类基元的光谱、形状,以及空间关系的多特征分析,建立区分规则实现。在二级分类体系中,水体进一步细分为海域、养殖水域和其他内陆水体;建设用地则进一步细分为道路堤坝和其他建设用地。最后,对同一地区不同时相图像的多级分类结果进行叠合分析与变化检测,获取海域使用情况的多时相动态变化信息。
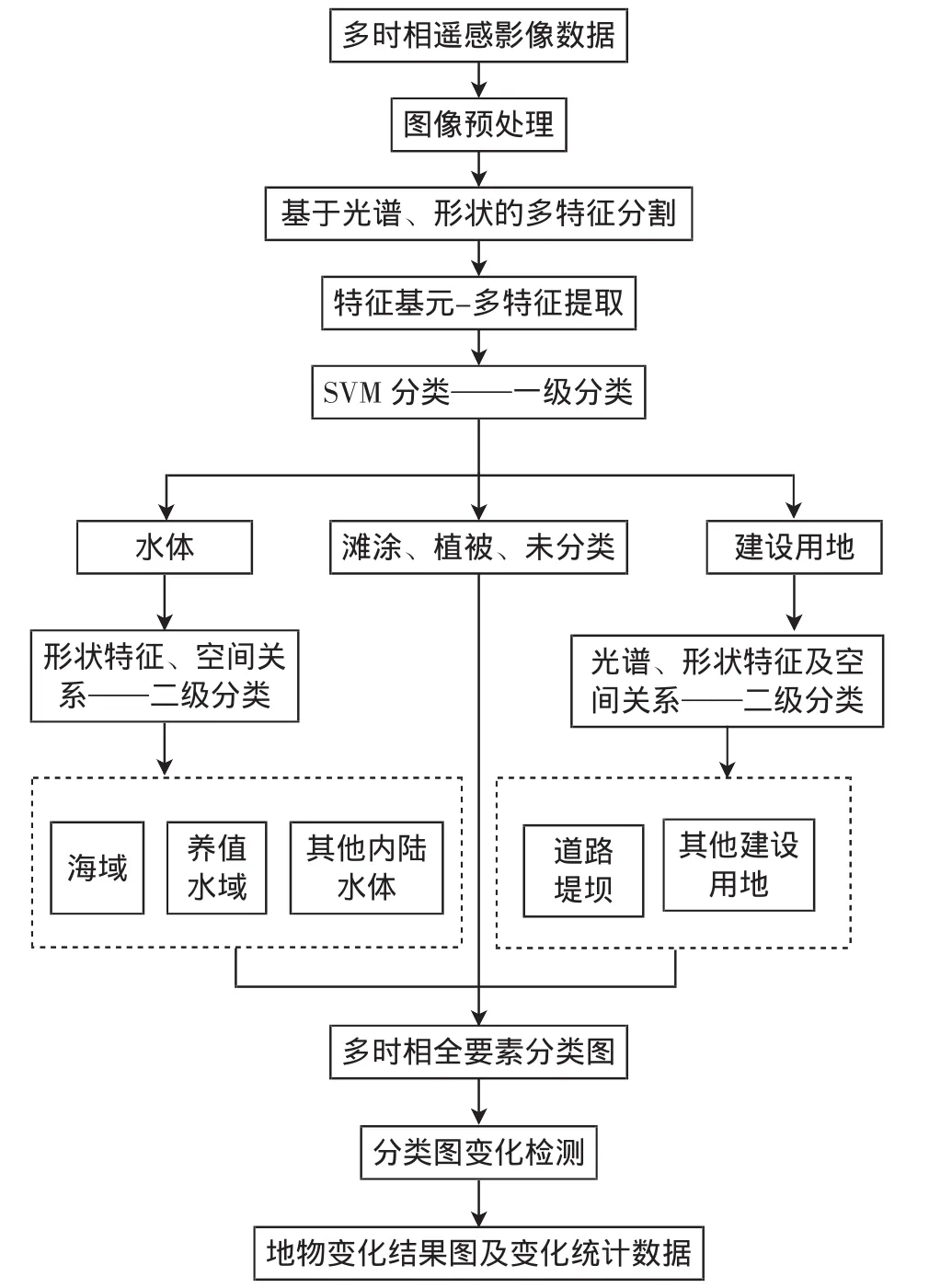
图1 技术流程
1.1 多精度图像分割与特征提取
图像分割是面向对象的图像分析的第一步且关键的一步。分割结果的好坏将极大地影响后续分析的效率与质量。本文利用光谱、形状特征结合的多精度图像分割方法对图像进行分割获取特征基元。方法的主要过程如下:首先,采用降水分水岭变换的分割方法对遥感图像进行分割,获取分割的次一级斑块,即分割亚基元;然后设计一种可重复合并的快速图斑合并方法对图像进行亚基元的层次归并,获得最终分割斑块,从而实现图斑分割(汪闽等,2010)。在合并过程中斑块之间的差异是通过它们的光谱合并代价与形状合并代价的加权和来定量体现,合并结束的标志是斑块间合并代价超过用户指定的尺度参数的平方。具体技术步骤见图2。
针对围填海工程信息的特点,提取出特征基元的光谱(均值、方差)、形状(面积、周长、长宽比、矩形度等)和空间关系(父子关系、邻居关系)等10余种特征服务后续多级分类与信息提取过程,光谱特征主要应用于一级分类;形状特征及空间关系等主要应用于二级分类中堤坝道路和养殖水域的提取。
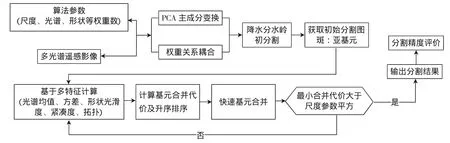
图2 多精度分割方法流程
1.2 一级分类
采用支撑向量机 (Support Vector Machine,SVM)分类器为主要分类方法实现特征基元面向对象一级分类。支撑向量机算法是由Vapnik提出的一种新的机器学习算法,与传统机器学习方法相比,SVM在解决小样本、高维度问题上具有比较大的优势 (Vapnik,1995;Bernhard et al,1997;李朝峰等,2007)等。本文一级分类过程和常规监督分类过程类似,即通过选择5个类别的代表样本,以光谱特征(波段均值)为分类特征进行分类器的训练和测试,并对未知样本进行分类以完成整个一级分类过程。
1.3 二级分类
如图3所示,在一级分类的基础上,以建设用地为父类约束,利用光谱、形状、邻近海域等特征,建立知识规则,将道路、堤坝等线状地物和其他建设用地区分开来;以水体为父类约束,利用光谱、形状,以及邻居图斑类别约束等特征将养殖水域和其他水域,如河流、沟渠等区分开来。

图3 二级分类流程
1.3.1 道路堤坝提取
道路与堤坝作为人工地物,一般形状规则,边缘清晰,具有线性特征;且呈现较亮色调,与其相邻的海滩、植被、水体等光谱响应有着较为明显的差异。图像分割之后,其图斑的光谱特征一般集中在某一光谱范围内,而且图斑的长度、长宽比数值较高。为此,首先选取合适波段,设定合适的光谱阈值进行图斑的初筛;其次,引入长宽比和长度特征,设定阈值规则,滤除非堤坝图斑。此外,还可进一步引入空间关系,即是否与海域或滩涂相邻接来对道路和堤坝进一步细分。
1.3.2 养殖水域提取
养殖水域一般为人工修筑而成多具较为规则的形状。其提取是在一级水体类中,通过剔除非养殖面状水域和线状水域的方式实现(谢玉林 等,2009)。具体分为两个步骤:1)面状水域的剔除。面状水域主要由灰度值较低、面积较大的图斑组成(主要对应海域和湖泊等地物)。为此首先在已提取的水体背景下,设定面积值,初步提取面状水域图斑集合。然后,在水体一级分类结果中,利用相邻关系进行面状水域的扩展,获取所有面状水域,而后将其剔除。2)线状水域(主要为河流、沟渠等)的剔除。线状水域往往形状上细长且不太规则,为此可根据图斑的长宽比和矩形度将其从一级水体中剔除。剔除面状水域和线状水域后,一级水体中的剩余部分为所需的养殖水域。
1.4 地物变化检测
变化检测是通过分析同一地区不同时期拍摄的遥感图像间差异得到感兴趣地物类型的转变或内部条件和状态的变化的过程(Singh etal,1989)。本文利用变化检测技术实现围填海工程修建情况的动态监测。其基本过程是:1)通过对原图像进行裁剪、校正与配准,保证两时相遥感图像分类图精确配准;2)分类图空间叠置分析,检测出地物的变化信息及变化方向;3)生成地物变化的图形和统计数据,实现变化检测成果的可视化表达。
2 技术实施
2.1 软件系统
采用Microsoft公司的Visual C++2005、SQL Server 2008为主要开发环境对以上技术进行了实现,开发了相应的软件系统并已在江苏省海域使用动态监视监测中心投入业务运行。该系统采用矢栅一体化数据模型,C/S、B/S混合的系统架构,是一个集常规图像处理与面向对象专题信息提取技术于一体的软件平台。如图4所示,整个系统包含图像处理子系统、图像分割与特征分析子系统、专题信息提取子系统、面向对象分类子系统、变化检测子系统及成果输出与管理等主要模块,较为完整地覆盖了从低端图像处理到高端图像分析、成果输出等遥感信息处理的业务环节。

图4 系统构成

图5 典型案例
2.2 实施案例
依托本文所提出的信息提取技术与软件平台,江苏省海域使用动态监视监测中心对2009-2012年以来的江苏沿海重点工程项目进行了遥感动态监测,编制了年度遥感动态监测报告。以下给出江苏省海门市滨海新区建设用海的一个实际案例。
案例采用法国SPOT-5 10m分辨率的多光谱高分遥感影像为数据源进行地物分类和围填海工程的变化检测。获取时间分别为2009年4月22日和2011年4月14日。对图像校正配准和裁剪得到如图a和b的工程区域。
采用多精度分割方法对图像进行分割。分割尺度设置为10,光谱异质性0.9,形状异质性0.1,紧凑度和光滑度均为0.5。分割结果如图c和d所示。分割出图斑后,计算其光谱、形状和空间关系等一系列特征。
其次对分割图像进行分类。分类图例如图j右图例第一层次所示。按照分类体系采集相应的地物样本,一级分类以光谱特征为主导,使用支撑向量机分类器。分类器采用高斯径向基核函数,核宽标准差40,惩罚参数25。分类结果如图e和f所示。
以一级分类的建设用地为父类约束提取堤坝。堤坝提取波段选择图像的第一波段即绿光波段,光谱均值设置为129~180,长宽比大于1.6,长度大于15。对错误分类图斑进行少量修改以保证分类精度,提取结果如图g和h所示。图例如图j右图例建设用地第二层次所示。
以一级分类的水体为背景提取养殖水域。养殖水域提取是在水体中剔除面状水域(海域)和线状水域(线状河流),而后得到养殖水域。剔除面状水域,图斑面积设置为大于等于500;剔除线状水域,长宽比大于2且矩形度小于等于0.5。对错误分类图斑进行少量修改以保证分类精度,提取结果如图g和h所示,图例如图j右图例水体第二层次所示。以上分类的定量精度评价如表1所示。
将两个时相图像的分类图进行叠合,并设定“去除小图斑”参数为250个像素,滤除过为细小的变化图斑,进行变化检测操作。检测结果如图i所示,同时输出如表2所示的各种地物变化流向的统计数据,从而实现了区域内土地利用变化情况的遥感分析。
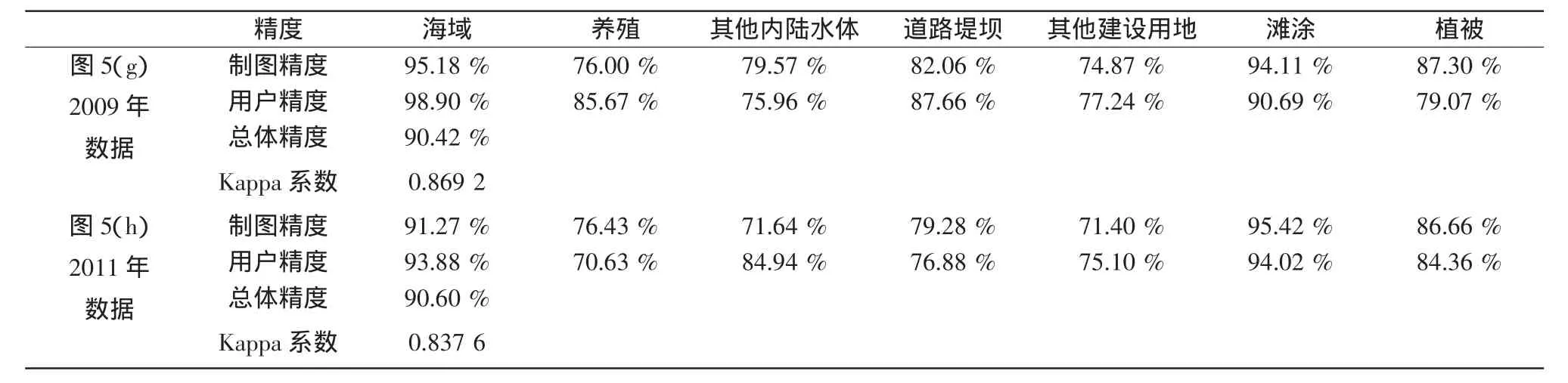
表1 分类精度评价
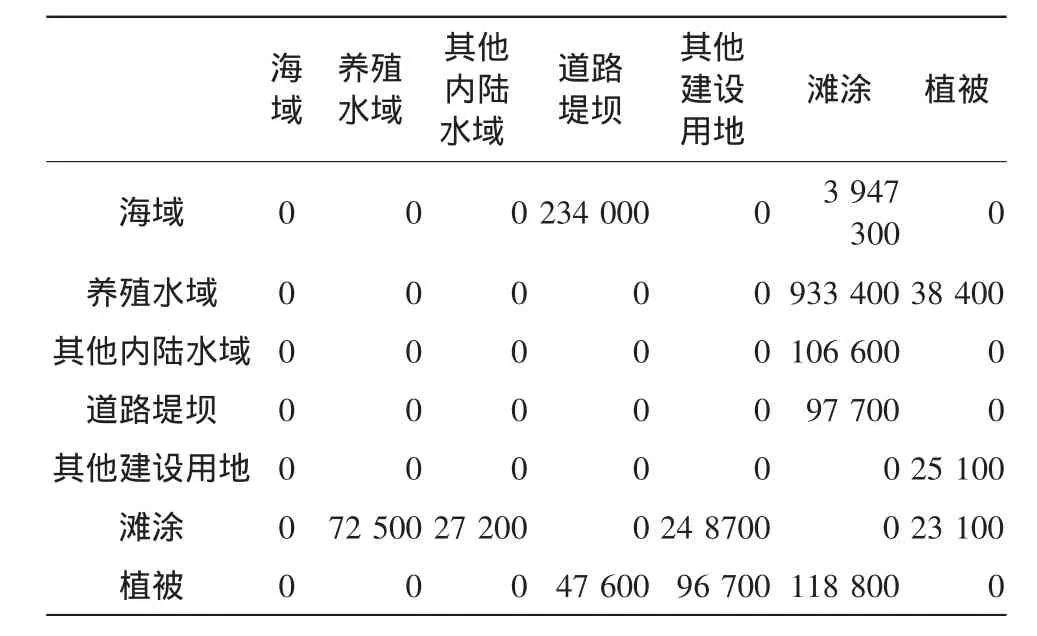
表2 变换检测结果统计(单位:m2)
3 结论
高分辨率遥感影像所表现的特征,如灰度、形状、纹理、空间结构等信息极为丰富,这使得中小尺度地物的精确提取成为可能。由于可使用特征的极大丰富,面向对象的图像分析技术对于高分辨率遥感图像具有较好的分类效果。基于面向对象图像分析的基本思路,本文针对海域使用遥感监测的业务特点,设计了面向对象遥感信息提取的技术流程,开发了相应的软件系统并在实际业务应用中检验了技术可行性与实用性,从而为江苏省的围填海工程等海域使用情况的遥感监测提供了新颖可行的解决方案。
BaatzM,Schape A,2000.Multiresolution segmentation: an optimization approach for high quality multi-scale image segmentation.In:Angewandte Geographische Information Sverarbeitung Ⅻ,Salzburg,Austria,12-23.
Bernhard S,Sung K K,Chris JC Burges,et al,1997.Comparing support vector machines with Gaussian kernels to radial basis function classifiers.IEEE Transactionson Signal Processing,45 (11):2758-2765.
Li C,Shao G,2012.Object-oriented classification of land use/cover using digital aerial orthophotography.International Journal of Remote Sensing,33(4):922-938.
Singh A,1989.Digital change detection techniques using remotelysensed data.International Journal of Remote Sensing, 10 (6):989-1003.
TrimbleChina.http://www.trimble.com/cn/.accessdate: 2012-11-14.
Vapnik V N,1995.Thenatureofstatistical learning theory.New York:Springer Verlag.
Zhang X Y,Feng X Z,Hong J,2010.Object-oriented method for urban vegetation mapping using IKONOS imagery.International Journal of Remote Sensing,31(1):177-196.
陈书全,2009.关于加强我国围填海工程环境管理的思考.海洋开发与管理,26(9):22-26.
韩富伟,苗丰民,赵建华,等,2008.3S技术在海域使用动态监测中的应用.海洋环境科学,27(Z2).
李朝锋,曾生根,许磊,2007.遥感图像智能处理.北京:电子工业出版社,27-91.
明冬萍,骆剑承,周成虎,等,2005.高分辨率遥感影像信息提取及块状基元特征提取.数据采集与处理,20(1):34-39.
汪闽,万其明,张大骞,等,2010.光谱、形状特征结合的多精度图像分割算法与应用.地球信息科学学报,12(2):261-268.
吴泉源,侯志华,于竹洲,等,2006.龙口市海岸带土地利用动态变化分析.地理研究,25(5):921-929.
吴曙亮,蔡则健,2003.江苏沿海滩涂资源及发展趋势遥感分析.海洋通报,22(2):60-68,82.
谢玉林,汪闽,张新月,2009.面向对象的海岸带养殖水域提取.遥感技术与应用,24(1):68-72.
许勇,陈洪全,周春霖,等,2010.盐城市沿海滩涂匡围与岸线变迁遥感监测研究.国土与自然资源研究,(5):10-11.
张明慧,陈昌平,索安宁,等,2012.围填海的海洋环境影响国内外研究进展.生态环境学报,21(8):1509-1513.
猜你喜欢
北京测绘(2022年9期)2022-10-11 12:25:14
绿色科技(2021年5期)2021-11-28 14:57:37
水上消防(2020年5期)2020-12-14 07:16:14
计算机技术与发展(2020年4期)2020-04-30 04:36:30
文史春秋(2019年11期)2020-01-15 00:44:36
电子测试(2018年15期)2018-09-26 06:01:34
智能城市(2018年7期)2018-07-10 08:30:00
电测与仪表(2017年24期)2017-12-19 05:15:24
现代计算机(2016年12期)2016-02-28 18:35:25
中国土地科学(2014年4期)2014-03-01 03:25:07
