应用人工神经网络于飞控系统故障检测研究
2013-08-14 01:20:28王进才
电子产品可靠性与环境试验 2013年3期
王进才
(陆军航空兵学院航电和兵器工程系,北京 101123)
0 引言
随着航空领域信息化技术装备的快速发展,各类传感器在系统中被广泛地采用,在大幅提高智能化的同时,也给维护维修提出更多的挑战。比如,设备一旦发生故障或失常,其所产生的错误就将直接导致系统功能的丧失。因此,及时地对测量系统故障进行检测,准确地识别感测部件的故障程度,不仅可减少系统检测时间,更重要的在于能确保系统安全。
系统诊断检测一般分3个阶段:故障检测(Fault detection)、故障定位与故障隔离(Isolation)以及系统部件值偏差程度的判定(Identification)。由于在系统中,部件与传感器可能因为异常而产生超出容许范围的偏离,使得感测性能降低,也就是所谓软故障(Soft fault)或称为参数故障,此类故障是由于失常部件参数值的偏差引起的。而硬件故障(Hard fault),可能会造成部件与系统间的短路、开路或是传感器的严重损坏,将会影响系统的整体性能与输出特性。
传统的传感器检错主要是以残差(Residuals)来作为判断的依据。残差信号的产生能用来估计传感器的状态,并检测实际的故障情形,以排除由于不稳定失效或信号失真所引起的错误告警(False alarms)。当残差产生后,借助设定的临界值(Threshold)进行检错分析,其限制的范围越严格,故障诊断的灵敏度就越高,但出现不正确告警的风险就越大。过去已有一些方法[1],原理上可分为硬件冗余 (Physical redundancy) 和解析冗余(Analytical redundancy)等方式。在硬件冗余中,就是设置多个平行并列的传感器于控制系统中,并以其输出信号作为故障判定的基准,但硬件冗余方法会增加系统成本和占用更大的空间,并且也会增加系统的复杂性,因此也就会降低系统可靠性。
面对日益复杂的装备系统,如何以最小的维护代价,得到最佳的维护效果,同时满足系统的使用安全,解析冗余提供了系统失效检测的另一个方法。而一个成功的解析冗余方法,需要模型对不确定性(Uncertainty)有好的鲁棒性(Robust),及对失效检测有高的敏感性(Sensitivity),所以如何建构良好的失效检测系统,是本文的目的。因此,本文运用人工神经网络感测系统失效,估计测量残差,将其与设定临界值进行比较,以达到检测系统失效的目的。
1 运用人工神经网络进行故障检测
本文系运用人工神经网络解析冗余的方法,以系统正常状况下传感器实际量测值当作训练数据实施训练,将人工神经网络训练与受控对象(Plant)传感器数据交联后,借助人工神经网络估计值与失效传感器产生残差予以评估,达到失效检测的目的,检测模式如图1所示。主人工神经网络(MNN)和3个分布式人工神经网络(DNN)皆为前馈式人工神经网络(FNN),将利用人工神经网络快速学习的特性,计算传感器输出值与人工神经网络估计值的残差,并进行评估。
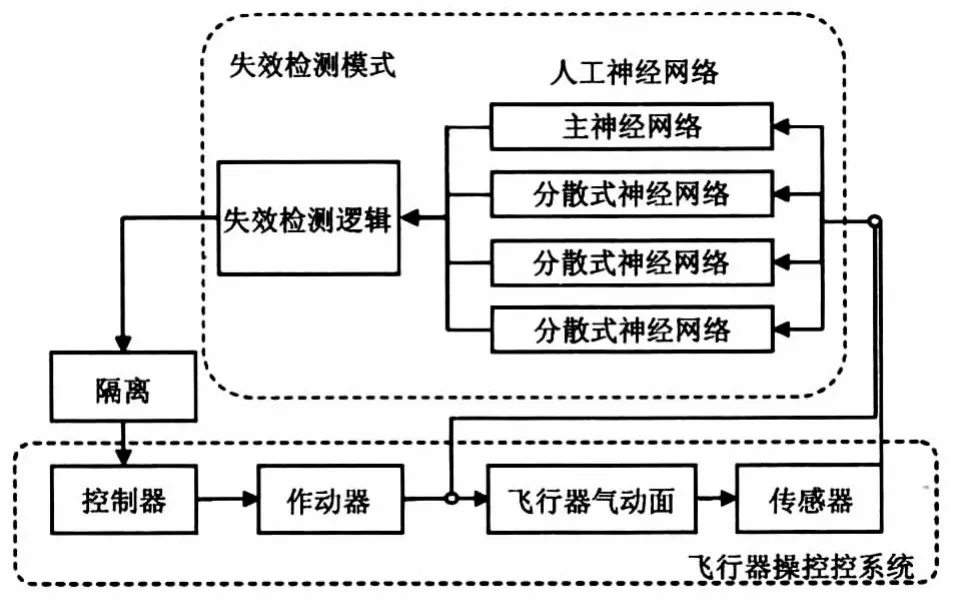
图1 人工神经网络应用于残差评估示意图
失效检测网络模式的各种功能如下:
a)主人工神经网络(MNN)
为反向传递神经网络架构,利用均方根失效指数作为指针,及变量输入、输出多对应能力,对飞行器的滚转角速率、俯仰角速率及侧滑角速率的耦合参数进行估计。
b)分布式人工神经网络(DNN)
辅助主人工神经网络检测工作,利用各参数间所存在的物理关系,分别对滚转角速率、俯仰角速率及侧滑角速率的解偶合参数进行单独的估计,以验证各参数是否已将不稳定失效及其它偏移量滤除。
依据飞机模式检查输入测量参数、输入的数目、隐藏层的数目及隐藏层的神经元数目、输出值及学习效率,相关参数如表1所示。分别训练MNN、DNNp、DNNq及DNNr 4个人工神经网络,供系统检错用。MNN人工神经网络系对飞行器滚转角速率、俯仰角速率及侧滑角速率的耦合参数进行估计,而DNNp、DNNq及DNNr则分别为滚转角速率、俯仰角速率及侧滑角速率的解偶合参数做个别估计[2]。

1.1 检测逻辑
系统在故障检测与隔离(Fault Detection and Isolation-FDI)模式中,利用实际量测值及利用数学模型估算值所产生的残差(Residual)来设定阈值(Threshold)执行检错工作。传感器的失效检测,是利用实际量测值对数学模型运算估算值残差来比对临界值以完成检错的工作。当残差产生时,由检测逻辑及设定的临界值来进行检测分析,其限制的范围越严谨,失效检测的灵敏度就越高,但出现错误警示(False alarms)的风险也就越大。因此,在本文中利用检测逻辑,将检测失效状态区分为正常(Normal)、 怀疑(Suspect)及失效(Failure)等3种状况,增强鲁棒(强健)性:
a)正常状况。指传感器工作正常,传感器一般运作保持在此状态。
b)怀疑状况。指传感器轻微地超出容许误差值。
c)失效状况。指传感器超出容许误差值很多。研究中利用FNN所训练的MQEE、OQEE和DQEE[3]来执行检错,而其方程式为:

其中:x=p,q,r。
1.2 临界值检测
共有3种分辨的临界值用来检测传感器的状况,其阈值为:
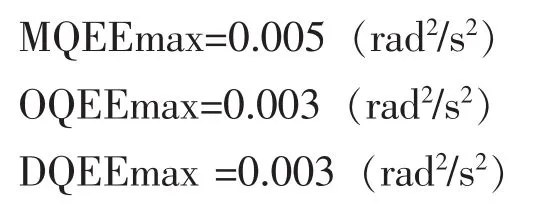
a)主二次型估计误差MQEE(Main quadratic estimation error)。此值为MNN与滚转角速率、俯仰角速率及偏航角速率传感器实际测量值的二项式失效估算值,阈值MQEEmax代表MQEE的最大值。
b)输出二次型估计误差 OQEE(Output quadratic estimation error)。此值为MNN与DNN的二项式估算值,临界值OQEEmax是OQEE的最大值。
c)分散二次型估计误差DQEEx(Decentralized quadratic estimation error)。此值为DNN分别与滚转角速率、俯仰角速率及偏航角速率传感器实际测量值的二项式失效估算值,临界值DQEExmax是DQEEx的最大值。
1.3 判定传感器的状况
在检测逻辑中,起初对传感器的状况在正常或其它状况下进行判定及转换的条件是:
a)正常状况。MQEE和OQEE两者的测量值均低于临界值MQEEmax和OQEEmax时,归类为正常状况,所以MQEE及OQEE在检测逻辑中属主要残差;如任一量测值过临界值,则利用DQEE继续判断。
b)怀疑状况。不符合正常状况检测逻辑条件时,则停止DNN学习,传感器则被归类为怀疑状况。
c)失效状况。不符合上述两种状况检测逻辑条件时,当DQEE超过DQEEmax,传感器则宣告为失效状况;故DQEE属辅助残差,借以判断怀疑或失效状况。
当传感器处在怀疑状况时,下一次测量值其DQEE低于DQEEmax,则传感器重新归类为正常状况;此时,DNN重新开始学习,当DQEE超过DQEEmax,传感器则被宣告失效。总之,在怀疑状况下,传感器DQEE需维持在DQEEmax之下;在失效状况下,传感器不是保持在失效状况,就是转换成正常状况,传感器若想从失效状况转换成正常状况,则DQEE必须降至DQEEmax以下,传感器被宣告成正常状况,且DNN学习重新开始。
2 系统仿真
本仿真分别按步阶失效(Step Failure)、漂移失效 (Drift Failure) 和不稳定失效 (Erratic Failure)3种不同特性的失效类型[4],分别加入滚转角速率、俯仰角速率及偏航角速率传感器信号中,共9组检测分析数据,每组均为独立传感器及环境,以分析失效检测模式对不同类型失效的检测情况。
检测状态设定某机型为正常飞行,模拟飞行50 s,飞行高度15000 ft、速度500 ft/s、失效时间设定第20 s(t=20)、检错临界值为:
各种失效类型的设定如表2所示。
2.1 滚转角速率传感器失效测试
2.1.1 步阶失效
1)如图2(a)、 (b)所示,当时间约20 s时主要残差立即检测出传感器突然的偏移值,并超出临界值,依传感器检测逻辑流程,进入怀疑状态;2)再由辅助残差图2(c)判断传感器失效;3)因此模式能检测出滚转角速率传感器步阶失效。

图2 滚转角速率传感器步阶失效检测
2.1.2 漂浮失效
1)如图3(a)所示,滚转角速率传感器漂浮失效检测,主要残差于模拟时间50 s内未超越临界值,表示MQEE对漂浮失效检测的反应较慢;2)主要残差 OQEE(图 3(b))于 34.5 s时超过临界值,进入怀疑状况;3)再经由辅助残差图3(c)图判断34.5 s时宣告传感器失效;4)显示失效检测模式对滚转角速率传感器缓慢性的漂浮失效具检测能力,惟检测出失效的反应时间,需视传感器衰退程度而定。

图3 滚转角速率传感器漂浮失效检测
2.1.3 不稳定失效
a)滚转角速率传感器不稳定失效检测
1)经仿真,主要残差显示时间0~20.5 s,检测结果判断传感器为正常状况;
2)当时间为20.5 s时,检测结果判断传感器为怀疑状况,再由辅助残差判断未失效;
3)当时间进行至时间26 s时检测结果判断传感器进入怀疑状况,再由辅助残差判断宣告失效。
b)证明失效检测模式对滚转角速率传感器不稳定失效具检错能力
本文设计俯仰角速率与侧滑角速率传感器失效测试,同样以步进阶跃失效、漂移失效及不稳定失效等3种不同类型进行失效仿真分析,其结果显示,模式对俯仰角速率传感器漂移及不稳定失效,未能判定,其它均能检测出传感器失效状况。未能判定原因,系受临界值设定及传感器失效程度的大小所影响。
3 结论
由于自动化系统的广泛运用,也促使传感器大量被使用,如何及时检测失效并获得有用的信息、采取适当、有效的控制策略,避免装备损坏及造成事故,这是值得重视的问题。本文应用人工神经网络理论架构,采用传感器失效检测模式,以某机型为研究对象,并仿真了传感器3种失效类型,验证了设计失效检测模式,使人工神经网络失效检测的理论及方法获得验证。此传感器检测模式有如下贡献:
a)所使用的检测方法,不需复杂及昂贵的量测设备,只需使用模式计算与实体量测来产生残差值评估;毋须硬件作备份,即可达到失效检测的目的。
b)因飞行计算数据庞大且繁杂,运用人工神经网络独特的分析、归纳和适应特性,于离线阶段进行网络训练与权重调整,训练网络通过回想过程以实现实时(Real time)失效检测的目的。此模式可以广泛地应用于复杂控制系统上。
c)本文检测模式的人工神经网络设计,包括1个主人工神经网络及3个分布式人工神经网络,借助各种不同的残差值设计及计算,增加模式对不同类型失效的检测能力及敏感度。
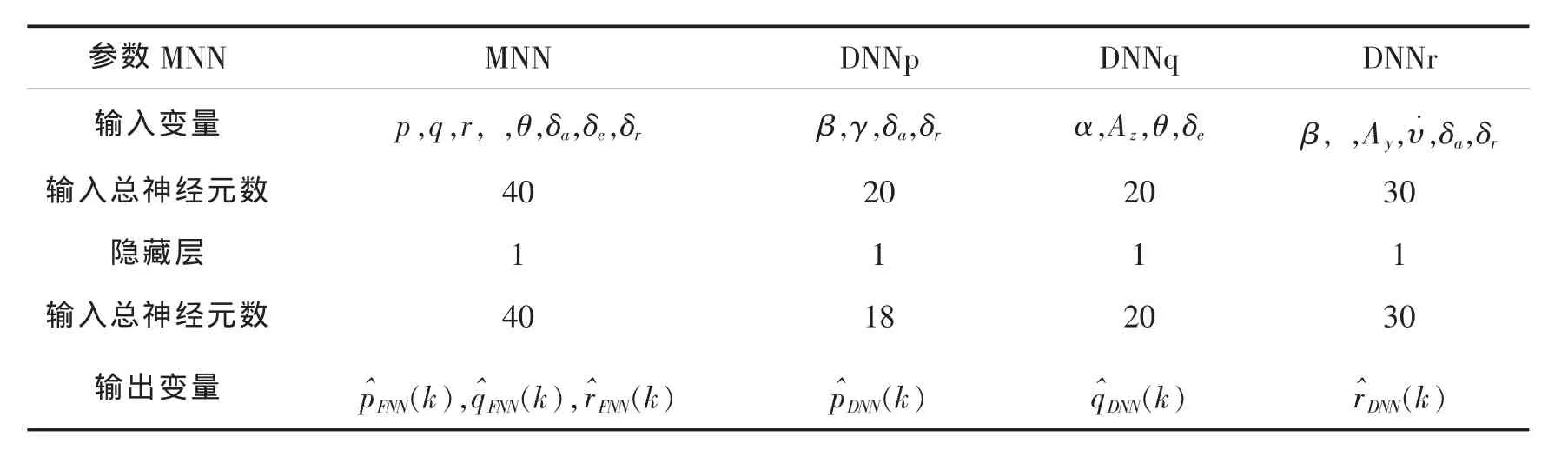
表1 失效检测模式中人工神经网络结构

表2 不同失效类型对某机型角速率失效设定值
[1]KORBICZ J.Advances in fault diagnosis systems[C]//Proc.10thIEEE Int.Conf.on Methods and Models Inautomation and Robotics MMAR.2004:725-733.
[2]WILLSKY A S.A survey of design methods for failure detection in dynamic system[J].Automatica,1996,32:601-611.
[3]FRAZER D G,NAPOLITANO M R,FAMOURI P.A neural network-based sensor validation scheme within aircraft control laws[R].USA:West Virginia University,2007:213-218.
[4]房方,魏乐.传感器故障的神经网络信息融合诊断方法[J].传感技术学报,2000,13(4):35-37.
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23 13:26:48
中学生数理化·七年级数学人教版(2021年9期)2021-11-20 06:11:52
北京航空航天大学学报(2020年10期)2020-11-14 09:26:02
空间科学学报(2020年4期)2020-04-22 01:17:12
自动化学报(2019年6期)2019-07-23 01:18:32
电子制作(2019年10期)2019-06-17 11:45:10
解放军健康(2017年5期)2017-08-01 06:27:42
知识经济·中国直销(2016年2期)2016-11-07 09:33:42
交通建设与管理(2015年13期)2015-03-20 15:18:48
河南科技(2015年8期)2015-03-11 16:23:52