
基于MEMS的GPS/SINS舰船组合导航系统设计
2013-08-11 01:48:26薇廖林炜
船舶 2013年1期
郭 薇廖林炜
(1.海军驻武汉438厂军事代表室 武汉430064;2.海军驻中南地区光电系统军事代表室 武汉430073)
0 引 言
GPS/SINS组合导航系统是组合式惯性导航系统中的一种重要类型,它包括捷联惯性导航系统(Strap-down Inertial Navigation System,SINS)和全球定位系统(Globe Position System,GPS)两个部分。其中,GPS易受地形地物的影响而导致定位中断,并且受制于人;SINS导航精度高、自主性强、隐蔽性好,但定位误差随时间积累。GPS和SINS这种互补的特点使得两者的组合有很好的效果,并且可以广泛应用于舰载导航、机载导航和提高反舰导弹的精确制导效率等场合[1-2]。
MEMS(Micro Electro Mechanical System)即微机电系统,是指可以批量制造的,集微型结构、微型传感器、微型执行器以及信号处理电路、接口、通讯和电源于一体的微型器件或系统。它以硅半导体材料为加工对象,采取专用集成电路制造技术把功能强大、复杂可靠的系统置于一个小小的硅片上,从而极大地拓宽了其设计及运用空间。自上世纪80年代MEMS概念被提出以来,MEMS技术在汽车工业、生物医学、航空航天等领域得到了广泛应用。随着MEMS技术的不断发展,微型惯性导航器件体积越来越小,精度越来越高。这就使得加速度计和陀螺仪安装在载体上变得简单易行,从而使GPS/SINS组合导航系统的可行性大大提高。一直以来,海军舰艇对导航的要求是在海洋的任何一个区域长时间工作,这就对导航的精度和稳定性有着很高的要求。本文设计的基于MEMS的舰船惯性导航系统恰好满足了这一需求。
1 原理和结构
1.1 捷联式惯导系统
捷联式惯导系统将加速度计和陀螺仪的基座与载体直接固联,载体转动时,加速度计和陀螺仪的敏感轴指向也随之转动。系统通过陀螺仪测量载体的角运动,计算得到载体的姿态角,确定加速度计敏感轴的指向;通过坐标变换,将加速度计输出的比力信号转换到另一计算比较方便的导航坐标系上,进行导航计算。与平台式惯性导航系统相比,捷联式惯导系统没有复杂的机械式惯性平台,结构简单,体积小,成本低,容易安装与维护。捷联式系统也存在明显缺点:陀螺仪和加速度计直接安装在载体上,要承受较大的振动和冲击且工作的动态范围较大,因此需要有高精度的陀螺仪和进行捷联陀螺的误差补偿才能保证系统的稳定与可靠,同时计算量大,精度较低。
1.2 GPS/SINS组合导航系统
GPS是以人造卫星为基础的无线电导航系统,在地球的任何位置、任何时刻只要能同时观测到4颗以上的卫星,就可以得到用户的三维坐标、三维速度分量和精确定位,其精度不随时间变化而变化。因此,可以将高精度的GPS信息作为外部量测输入,在载体的运动过程中频繁修正SINS以控制其误差随时间的积累,通过此法可大幅度提高微惯性测量的精度。这就是基于MEMS的GPS/SINS组合导航的基本思想,其设计系统结构如图1所示。
该系统包括捷联惯导系统和GPS系统两部分。捷联惯导系统(SINS)是其核心部分,包含3个微激光陀螺和3个微加速度计,可将GPS部分的数据通过卡尔曼滤波器辅助系统对捷联惯导进行修正。另外将微加速度计和微陀螺仪安装在转位机构上,一方面可以隔离系统受舰船运动的影响,另一方面作为船坞对准中的一个部分,易于对单个传感器进行标定[3]。
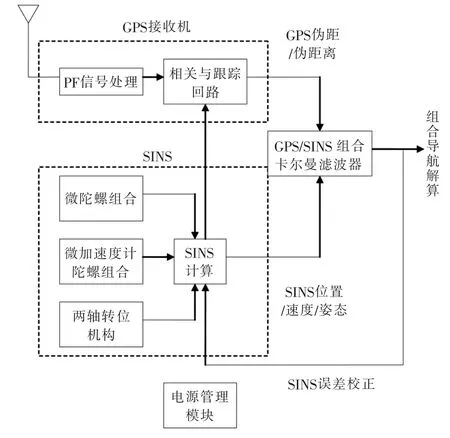
图1 基于MEMS的GPS/SINS舰船导航系统结构框图
2 设计关键技术
2.1 SINS系统的计算
为从微陀螺仪及加速运动计的测量值中提取姿态、位置、速度的信息,需对SINS系统参数进行求解,包括姿态确定、比力分解和导航方程等的解,计算框图如图2所示。其中姿态计算和导航计算是技术中较难实现的部分。
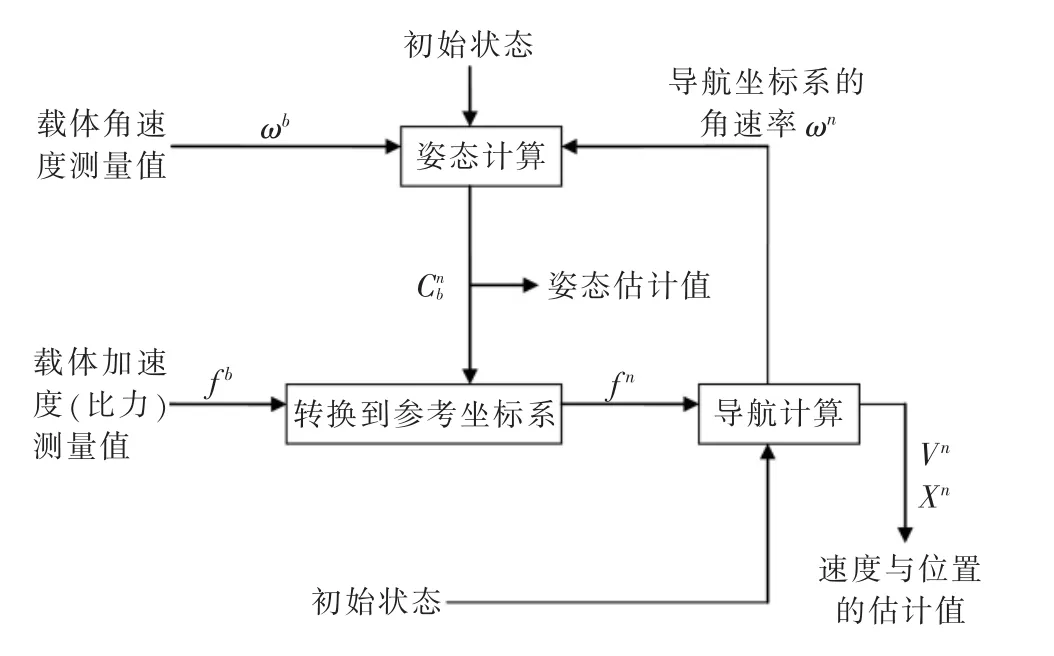
图2 SINS系统计算框图
2.1.1 姿态估计
运载体相对于一个坐标系的姿态对导航起着至关重要的作用,通过使用微陀螺仪提供的回转速率测量值,可以不断更新运载体的姿态值。姿态表达式的一般形式有方向余弦表达式、欧拉角表达式和四元数表达式。
方向余弦阵是一个3×3的矩阵,矩阵的列代表单位矢量在载体系中沿参考轴系的投影,可表示为式(1):

其中第i行和第j列的元素代表参考系i轴和载体系j轴之间夹角的余弦。
欧拉角的表示法是基于坐标变换时绕轴的旋转实现的,例如从参考轴系到新坐标系的转换过程中,绕参考系z轴旋转ψ角;绕新坐标系y轴旋转θ角;绕新坐标系x轴旋转φ角。其中θ,ψ和φ为欧拉旋转角。从参考系到运载体轴系的转换可表述为式(2):

四元数姿态表达式是基于坐标转换时可以用定义在参考坐标系的一个矢量的单个旋转来实现,四元数表示为,将载体系上的矢量用四元数来表示,通过公式即可得到参考系上的表示为=C,其中

2.1.2 导航计算
以导航坐标系为基准,导航方程可表示为式(4):

通过导航计算可以实时获得运动载体的运动速度,参与SINS系统计算。
2.1.3 数据获取
通过以上计算和估计,按照图1中的步骤完成GPS与MEMS捷联系统的组合导航解算,获得定位信息,另外通过误差补偿进一步提高定位信息的精度。
2.2 误差补偿
MEMS中的微加速度计精度要求已很高,如加速度芯片ADXL250标度因数为38 mV/g,在±1g范围内灵敏度为0.0380 mV/g,线性度为0.73%,基本满足舰船系统的导航要求。事实上,陀螺仪误差才是影响系统性能和精度的重要方面,这部分误差包括系统误差和随机游走误差。其中系统误差可以通过转位程序对陀螺进行标定,这需要用到卡尔曼滤波。从图1可以看出,接收位置(纬度/经度)信息,并与惯导系统得到的精度和纬度的估计值进行比较,该差值作为卡尔曼滤波器的输入信息,通过卡尔曼滤波器后给出系统误差状态的估计值来修正系统。
3 应用前景
基于MEMS的GPS/SINS舰船惯性导航系统融合了GPS系统和惯性导航系统的优点,是一种新型的组合导航方式,可广泛应用于航空、航天、航海等方面,且整套系统具有可靠性高、实时性强、微小型等特点,在军用和民用领域具有广阔的应用前景。
4 结 论
本文所设计的基于MEMS的GPS/SINS舰船导航系统充分利用了MEMS导航设备的精度高、体积小、成本低等优良特性,实现了自主式惯性测量,且隐蔽性好、重量轻,在GPS的辅助下具有更可靠的准确性,为未来舰船导航提供了一个重要的发展方向。
[1]刘爱元,李彪,祝萌.卡尔曼滤波在某型组合导航系统模拟器中的应用[J].海军航空工程学院学报,2005,20(1):127-129.
[2]段凤阳,常丽敏.某型飞机航姿系统综合检查仪的研究与设计[J].计算机测量与控制,2006,14(5):698-700.
[3]MARLAND P.The NATO ships inertial navigation system(SINS)[J].Journal of Naval Engineering,1992,33(3):688-700.
猜你喜欢
军民两用技术与产品(2021年7期)2021-10-13 08:12:10
湖北农机化(2020年4期)2020-07-24 09:07:44
测控技术(2018年2期)2018-12-09 09:00:56
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
北京航空航天大学学报(2017年5期)2017-11-23 05:53:18
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
北京航空航天大学学报(2017年12期)2017-04-23 08:31:50
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国惯性技术学报(2015年1期)2015-12-19 13:11:49
计算机工程(2015年4期)2015-07-05 08:28:57
