PID参数性能分析及改进
2013-08-10 12:46:40刘光亚彭维娜
湖北工业大学学报 2013年1期
刘光亚,彭维娜
(湖北工业大学 电气与电子工程学院,湖北 武汉430068)
PID控制器因其结构简单,适应性好,稳定性强在工业控制中被普遍使用,尽管传统的PID控制器可以满足常规的控制过程,但在工业控制过程中经常会碰到大滞后、时变的、非线性的复杂系统,如果系统中的参数未知或缓慢变化或带有延时和随机干扰,很有可能无法获得较精确的数学模型或模型的构造很复杂.对于这种情况若使用常规的PID控制器,可能较难整定PID参数,而使系统难以达到满意的结果.PID控制器参数整定好坏常常是以在系统中能不能达到期望的效果为标准的.为了解决这些问题,出现了很多整定PID参数的方法,但不是太不理想就是过于复杂,而采用Fuzzy-PID控制器,M-PID控制器等复合型控制器,可以达到相对理想的控制效果,它对各种被控对象、不同的控制指标均能实现PID最佳调整.
1 PID控制器参数对控制性能的影响
1.1 比例系数对控制性能的影响
比例增益的应用是为了减小稳态误差,提高响应速度.但是如果比例系数过大也可能降低系统的稳定性.
1.2 积分系数对控制性能的影响
常数Ti的大小,Ti越小,积分作用越强,反之则积分作用弱.但它的相位角为-900,这将会减小相位的相对裕度导致系统稳定性大大的下降.
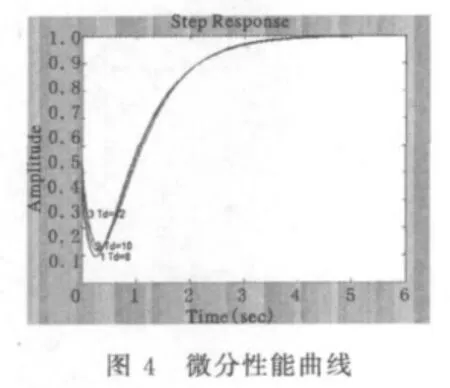
1.3 微分系数对控制性能的影响

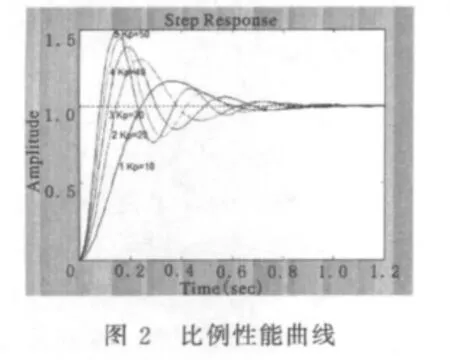
以2阶线性函数为被控对象,进行PID控制器(图1)的仿真,其传递函数

微分系数的作用主要是为了加快响应速度、降低超调量,改善动态性能.并且能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而提高系统的稳定性,减少调节时间.
PID的传递函数为
图1 PID原理图
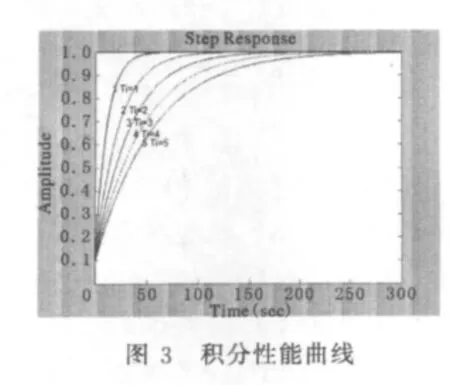
分别分析比例(proportional),积分(integral),微分(derivative)在系统中起的作用,得到响应曲线见图2、图3、图4.
积分作用的引入可以提高系统的型别和使稳态误差变小.积分作用影响力的大小取决于积分时间
2 模糊控制仿真设计
模糊控制建立的基础是模糊逻辑,与传统的逻辑系统相比,其更接近于人类的思维和语言表达方式,对于一些较难建立精确数学模型或者控制过程复杂的控制系统,使用模糊控制能较好的解决这一问题.模糊自适应PID控制根据PID控制器的三个参数与偏差e和偏差的变化ec之间的模糊关系,在运行时不断检测e及ec,通过事先确定的关系,利用模糊推理的方法,在线修改PID控制器的三个参数,让PID参数可自整定.
模糊自适应PID控制器以误差e和误差变化ec作为输入,可以满足不同时刻PID控制器的参数自整定要求.其结构见图5.对传递函数为

的系统分别运用传统PID控制器和Fuzzy-PID控制器进行仿真.取采样周期为1ms.对常规PID控制器与采用模糊自整定PID控制器的系统响应曲线进行比较.
2.1 传统PID控制器
其参数为Kp=1.5,Ki=2.0,Kd=0.05,仿真所得的结果见图6.

图6 常规PID的输入输出曲线output curve
2.2 运用模糊自适应PID控制
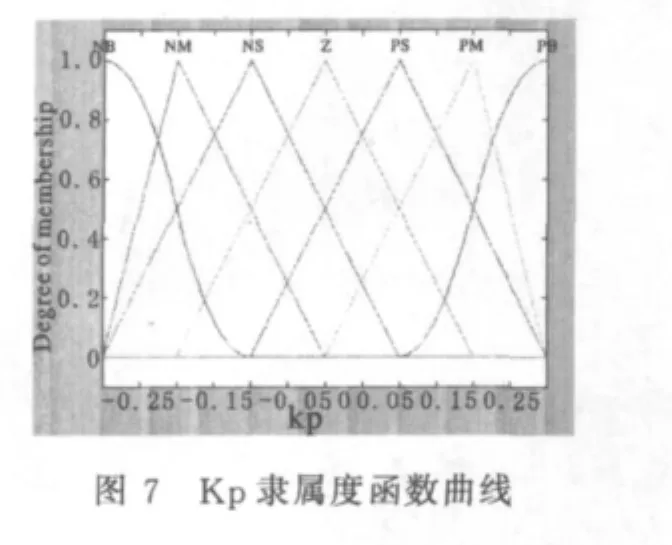
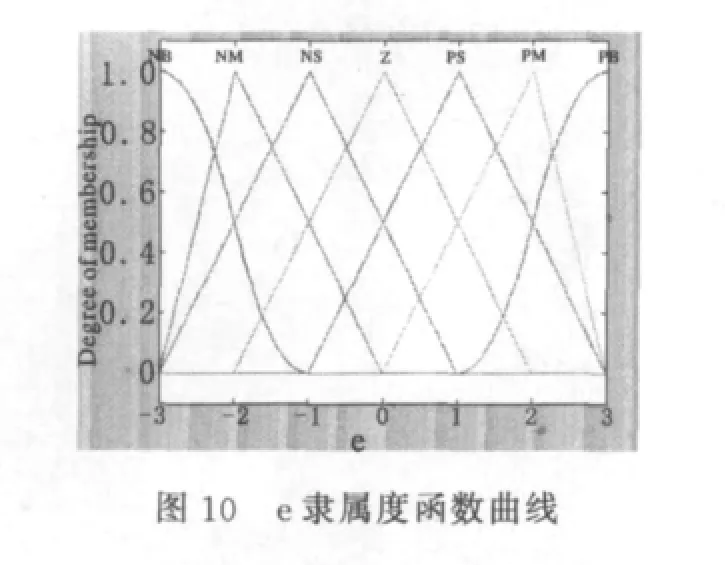
模糊控制器中Kp,Ki,Kd为输出量,e(系统误差),ec(误差变化律)为输入量.将e和ec的变化范围定义为模糊集上的论域.

其模糊子集为e,ec= {NB,NM,NS,O,PS,PM,PB},设e,ec,Kp,Ki,Kd均服从正态分布,因此可得出各模糊子集的隶属度(图7~图10).模糊自整定PID控制的响应曲线见图11,其中1为输入曲线,2为输出曲线.

图5 自适应模糊PID结构



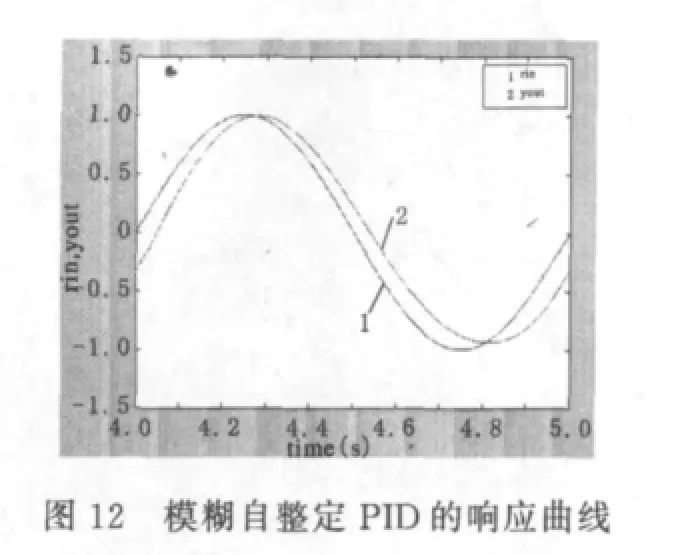
PID参数模糊自整定是找出PID的3个参数与e和ec之间的模糊关系,允许通过不断检测e和ec,依照模糊原理来对3个参数进行整定,以满足不同的e和ec对控制参数的不同要求,使被控对象有良好的动态和静态性能.
模糊PID对于被控对象参数变化的适应性强,而且响应特性和速度优于普通PID控制.特别的,就算在对象模型的结构发生较大改变的情况下也可获得较为理想的控制效果.模糊PID控制器还有待在实践中检验、发展和完善.
3 关于M-PID
忆阻器(memristor),又名记忆电阻,是一种被动电子元件.忆阻器被认为是电路的第四种基本元件,仅次于电阻器、电容器及电感元件.忆阻器可以在关掉电源后,仍能“记忆”通过的电荷.两组的忆阻器更能产生与晶体管相同的功能,但更为细小.
忆阻器的电阻会随着电压的改变而改变,所以在控制系统中可以作为一个自整定参数的器件进行运用,由于这个原因可以将忆阻器运用于PID控制控制器中,称为M-PID.PID中的参数整定是系统设计的核心内容,选取适当的PID参数是PID控制中重要的一环,但是当运行状况或参数环境改变时,传统的PID较难确定一个最佳的整定参数.
当忆阻器代替PID控制器中的一般电阻构成M-PID,其将比常规的PID控制器有更快的响应速度,更好的稳定性,忆阻器的公式

4 总结
尽管已经出现多种先进控制方法,PID控制仍然在各种工业控制技术中占据主导地位.随着技术的发展,各种各样的集成混合PID控制出现,使PID控制器的参数实现最佳的调整;本文从算法和PID结构本身改变进行分析.在PID控制中运用模糊推理可以相对精确地对参数进行最佳整定,并且具有较高的抗干扰性;而在PID的结构上利用忆阻器代替电阻则使其具有较快的响应速度和更好的稳定性.故对PID控制器的改进不仅在算法方面,也可以同时在结构方面进行调整,将会更好地提高PID的性能.
[1]Yogesh N Joglekar,Stephen J Wolf.The elusive memristor:properties of basic electrical circuits[J].Eur J Phys,2009,30:661-675.
[2]Wang Xiaoping,Zhao Yunliang,Liao Yuanqing.Dynamic performance analysis of pid controller with one memristor[J].International Conference on Information Science and Technology,March 2011,26-28:1 234-1 237.
[3]边丽华.PID控制器参数自整定方法的研究与实现[D].大连:大连理工大学图书馆,2009.
[4]姜长生,王从庆,魏海坤,等.智能控制与应用[M].北京:科学出版社,2007.
[5]吴振顺,姚建均,岳东海.模糊自整定PID控制器的设计及其应用[J].哈尔滨工业大学学报,2004,36(11):1 578-1 580.
[6]夏 玮,李朝辉,常春藤.控制系统仿真与实例详解[M].北京:人民邮电出版社,2008.
猜你喜欢
电子设计工程(2022年15期)2022-08-17 10:07:16
光通信研究(2020年2期)2020-06-15 07:42:58
科技创新与应用(2019年17期)2019-06-09 08:38:29
机电工程技术(2018年10期)2018-12-06 02:26:38
电子制作(2017年24期)2017-02-02 07:14:25
郑州大学学报(理学版)(2014年2期)2014-03-01 04:20:51
电子与信息学报(2012年5期)2012-09-19 11:32:36
大众科学(2012年6期)2012-08-30 12:06:36
电子世界(2005年6期)2005-04-29 00:44:03