3PRS-f并联机器人工作空间的建模与仿真
2013-08-10 12:46:26熊志勇胡亚波
湖北工业大学学报 2013年1期
熊志勇,胡亚波
(1宁波敏实汽车零部件技术研发公司,浙江 宁波315800;2湖北交通职业技术学院,湖北 武汉430079)
机器人工作空间又称为可达工作空间或总工作空间,是指机器人输出机构参考点在空间所能达到的区域,目前有关串联机器人工作空间的研究已经相当成熟,但对于并联机器人,由于其本身结构比较复杂,工作空间的求解难度较大[1].并联机器人的工作空间都是三维空间区域,其边界都是空间曲面.对于空间区域的描述,可以认为是经由许多平行的平面截取而得到一组二维曲线的组合;对于空间曲面,可以用一些离散的点来描述[1-2].并联机器人工作空间的求解大多都采用数值解法,本文基于一种3PRS-f并联机器人,拟定一种空间搜索方式,利用位置反解来对工作空间进行描述,并进行仿真.
1 3PRS-f机器人结构
3PRS-f机器人(图1)由三角动平台a1a2a3及其拓展点P、3个支撑杆Li以及由步进电机与丝杆螺母副组成的三个移动装置(移动副P)组成.点P为机器人的末端执行器,它到三角动平台的垂直距离为f,随着动平台一起运动.三角动平台的端点分别用3个球铰与3个等长的支撑杆连接(球副S).3个支撑杆的另一端分别通过销轴和螺母相连(转动副R),其中销轴的方向分别垂直于对应的支撑杆.机器人的底座上垂直安装有3个立柱,3个移动装置分别固定在这3个立柱上,其丝杆的轴线方向垂直于底板.立柱上3个滑块位移的起点构成了三角静平台.O-XYZ为静坐标系;c-xyz为动坐标系,固定在动平台上.
机器人中的f参数,在实际应用中是很有意义的.对于并联加工机床而言,P为刀具加工点,f即为加工点到动平台的距离;对于医疗机器人而言,P可能为激光治疗点或是超声聚焦点,f即为能量聚焦点到到动平台的距离.
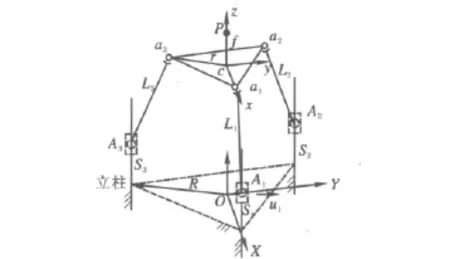
图1 3PRS-f并联机器人结构简图
2 影响工作空间的要素
3PRS-f机器人中,对工作空间影响比较大的要素表现为滑块的位移范围、定长杆的长度、球铰的转角和杆间干涉等.而且只有通过求出这些约束条件,才能和机构的位置反解一起求出工作空间.
2.1 滑块位移的限制
根据滑块在轨道上的行程,其位移S必须满足

这里的Smin与Smax表示滑块位移的最小值和最大值,本机构中的Smin取0,Smax为275mm.
2.2 定长杆的长度约束
本机构中的三个杆均为定长杆,当杆长选定后,则工作空间的大小也就决定了,只能是杆的运动能够达到的范围.本机构中的定长杆杆长Li=L=290mm (i=1,2,3).
2.3 球铰转角的约束
球铰连接着动平台和定长杆,其转角φ对工作空间的影响非常大.本机器人中,球铰竖着安装在动平台下端,转角φ=50°.图2是机构处于初始状态时的状况.
根据本机构的几何尺寸,可得出初始状况是定长杆与动平台的反向法矢的夹角φ0=10.77°;另外定长杆与静平台的夹角θ0=79.23°,定长杆与立柱(即丝杠)的夹角γ0=10.77°.设定长杆与动平台的反向法矢的夹角(即向量li和τ的夹角)为φi(i=1,2,3),则

这里φi的约束条件是0≤φi≤φmax.其中,φmax=的自由度为3,故已知动平台的位姿中相关的3个参数,即可求出输入端参数和一些过程参数.由于本文的研究重点在于工作空间,故这里不再赘述.
本文对工作空间的搜索方式如图3所示,其中P与c分别是超声聚焦点和动平台中心点,动平台的法矢τ(也就是cP方向的方向向量)与Z轴的夹角为α,P3D与X轴的交角为β.于是有
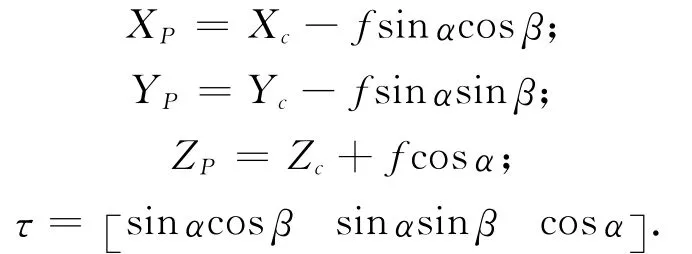

图3 工作空间求解方法
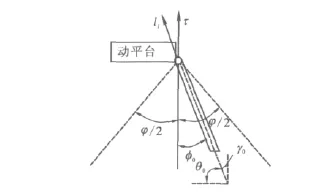
图2 球铰的约束
给定参数Zc、α、β3个参数的值,来求解末端执行点P的位置,该位置的集合即为3PRS-f的工作空间.搜索方式从外到内分3层来理解,先给定一个动平台中心c的纵坐标步距ΔZc,使Zc从Zc,min到Zc,max变化(Zc,min和Zc,max,的值可由3PRS运动反解方程求出)每增加一个步距,并依次用Z=Zc(ΔZc)的水平面切割空间一次;在某一水平面内,β值都将以步距Δβ来一个从0到360°的扫描,如图4所示(工作空间的各截面的俯视图),并依次使每一个竖直平面Y=(tanβ)X切割空间一次;某一竖直平面内,给定α一个步距Δα,让α从0到αmax扫描,同时考查上文的约束条件,从而可以上文的方程得出P点的运动轨迹.
2.4 杆间干涉
在3PRS-f并联机器人中,由于转动副分布的限制,不会出现杆间干涉的情况.
3 工作空间的建模
机器人工作空间的求取,实际上就是按照一定方式在空间扫描,求取末端执行器所能到达的的集合.本文将3PRS-f机器人的工作空间进行分层次地搜索,并基于机器人的反解方法以及约束条件,求取末端执行器所能达到的一些离散点,这些点的集合就是所求的工作空间.文献[3-5]研究了3PRS并联机构的运动反解方程的求法,即根据PRS并联机构

图4 在步长Δβ下工作空间的切割图
3PRS-f机器人的工作空间具体的算法框图如图5所示.

图5 工作空间求解算法流程图
4 工作空间的仿真
根据上文的算法模型,利用Matlab软件求出工作空间所有离散的点,这些点的集合就是3PRS并联平台机构工作空间.下面给出一组求工作空间的参数:

还给出3PRS-f并联机器人的其他参数:上下平台的尺寸r=106mm,R=162mm(图1);f=270 mm.
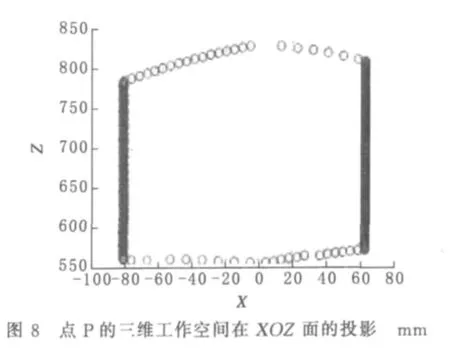
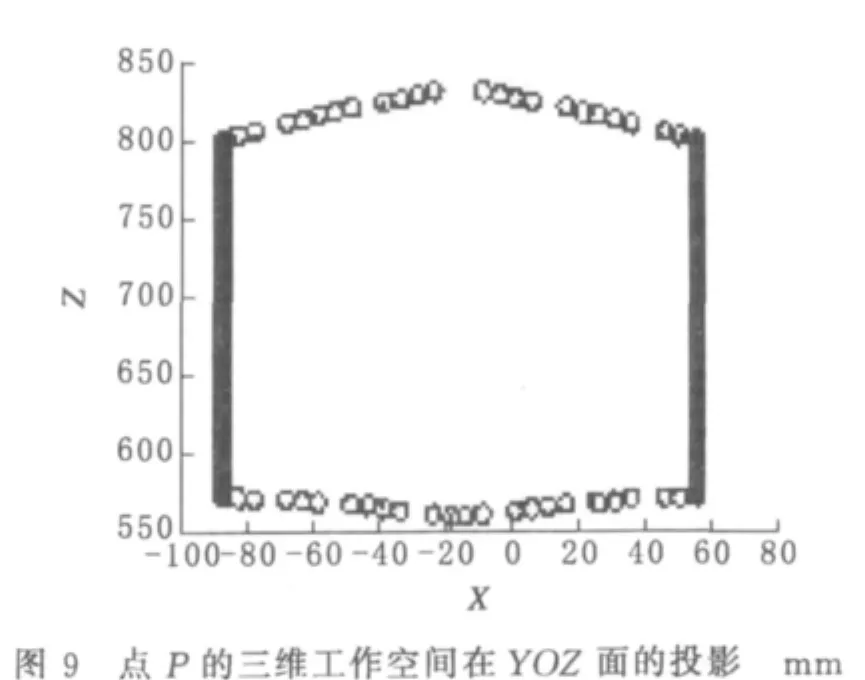
为了便于直观且使计算机更加快捷地计算,在不影响其结果的情况下,只计算出边框点.图6~图9列出了机器人末端执行器P点的三维工作空间图及其在XOY/XOZ/YOZ中的截面图(用小圆圈表示离散点).


5 结束语
本文以3PRS-f并联机器人为研究对象,从滑块位移、定长杆长度、球铰转角、杆间干涉等方面分析了影响其工作空间的约束条件.本文得出了末端执行点P与动平台中心c的关系,并在此基础上利用3PRS并联机构的运动学反解方程,提出了一种空间点的搜索方式,建立了工作空间的求取模型.最后用Matlab软件的仿真功能,对工作空间进行了仿真,生成了一些工作空间的相关图形,使工作空间更直观.
[1]黄 真,孔令富,方跃法.并联机器人机构学理论及控制[M].北京:机械工业出版社,1997.
[2]李 方,南仁东.一种分析并联机器人工作空间的解析几何法[J].机械制造,2003(3):12-14.
[3]莫 贤,陈文家,陈淑艳.一种3-PRS并联机器人的姿态空间分析[J].扬州大学学报(自然科学版),2009,12(3):60-64.
[4]刘宏伟,马质璞.3-PRS并联机构运动分析及仿真[J].机械设计与制造2012(1):216-218.
[5]李王英,徐尤南,刘治强,等.3-PRS型三足并联机器人位置逆解分析[J].机械工程师,2008(3):58-59.
猜你喜欢
爆炸与冲击(2021年3期)2021-03-22 07:19:58
兵器装备工程学报(2021年1期)2021-02-23 09:26:00
中学生数理化·七年级数学人教版(2020年12期)2021-01-18 06:57:42
语数外学习·高中版上旬(2020年8期)2020-09-10 07:22:44
东坡赤壁诗词(2019年3期)2019-07-05 06:55:54
西南石油大学学报(自然科学版)(2018年4期)2018-08-02 05:42:38
广西电力(2016年5期)2016-07-10 09:16:44
中国塑料(2015年9期)2015-10-14 01:12:35
河南科技(2015年2期)2015-02-27 14:20:28
河南科技(2014年3期)2014-02-27 14:05:55