
波浪能、潮流能海上试验场现场监测系统设计
2013-08-06 10:58王项南
海洋技术学报 2013年2期
杨 磊,王项南,王 鑫,李 彦,吴 迪,路 宽,周 达
(国家海洋技术中心,天津 300112)
在海洋能装置实海况试验的前期,需对试验海域的海洋能资源状况、水文气象环境以及海底底质等进行较长时间的调查,这将耗费大量的人力物力,大大增加了海洋能装置实海况试验的实验成本与试验周期。因此,在试验场设计并安放一套系统的现场监测设备是解决这一问题的最有效途径。
目前,国内外开展了许多不同目的、不同环境的观测网络技术研究,例如加拿大的“海王星”海底观测网[1],通过海底光缆连接安装在海底的仪器设备,进行实时、连续的观测,并通过光电缆将观测信息传回陆地实验室;日本伊豆半岛海域铺设的实时海底观测网[2],即地震-海啸观测监测系统(DONET),由20个观测点密集展布,各观测点都设置有宽频带地震仪、强震仪、高精度水压仪、压差仪、水中地震检波器、温度计等传感器,对日本东南海域地震源区进行测量;美国海洋研究领导委员会制定建立的永久性海洋观测系统(IOOS),计划将分属各涉海部门的现有观测系统集成为一个面向全美的综合性海洋观测系统[3]。我国在渤海、东海和南海也开展了立体监测系统的示范试验[4-5],并制定了研究方法[6]。
在海洋可再生能源专项的支持下,国家海洋技术中心开展了全国首个波浪能、潮流能海上试验场的选址论证及设计建设,根据试验场需求和场区环境条件开展了试验场监测系统的设计和研制。本文提出的波浪能、潮流能海上试验场现场监测系统,将极大方便海洋能发电装置的海上试验。
1 系统总体设计
1.1 需求分析
国内大部分波浪能、潮流能发电装置要求试验场区海面开阔,无岛礁与大型海上构筑物的遮挡,底质平坦少岩石,同时波浪能、潮流能资源储量丰富。针对这些装置的要求,确定了成山头波浪能、潮流能试验场,场区位于成山头至龙须岛离岸1.5 km,面积约7.0 km2的区域。该区域地质结构稳定,海底相对平缓,沉积物以粉砂为主。表1列出了波浪能和潮流能发电装置对环境的要求与备选场区环境条件对比。

表1 波浪能、潮流能装置对环境要求和备选场区环境条件对比
本文提出的现场监测系统可测量波浪、表层流、剖面流等能量相关参数,同时其测量的风、温湿、潮位等参数也直接影响发电装置的运行环境。
1.2 系统组成
根据试验场的环境条件和发电装置对监测要素的需求,设计试验场现场监测系统的总体结构包括岸站水文气象观测系统、波浪骑士、中型多参数监测浮标和大型海洋资料浮标,各子系统的测量数据由岸上的数据库统一存储管理,并可通过电信专线远程访问。
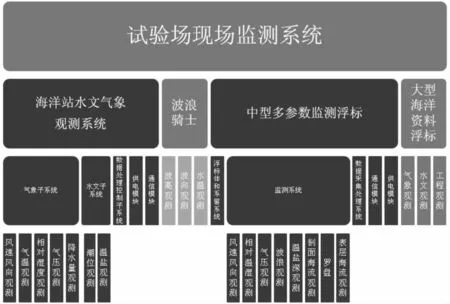
图1 试验场现场监测系统组成图
2 岸站水文气象观测系统设计
岸站观测系统可长期监测试验场区的潮汐、温盐、风速、风向、气温、气压、温度、相对湿度等参数。该系统依托海洋站,采用最新型的XZY3型自动观测系统,对数据的采集、处理和存储完全符合《海滨观测规范》(GB/T 14914-2006)的要求。岸站系统由气象子系统、水文子系统和数据处理控制子系统三部分组成,还包括通信模块与供电模块,如图2。
2.1 主要功能及技术指标
2.1.1 气象子系统子系统自动采集、处理和存储风速、风向、气温、气压和降水量数据,向数据处理控制子系统传输数据。
2.1.2 水文子系统
子系统自动采集、处理和存储表层水温、表层盐度和潮汐数据,向数据处理控制子系统传输数据。
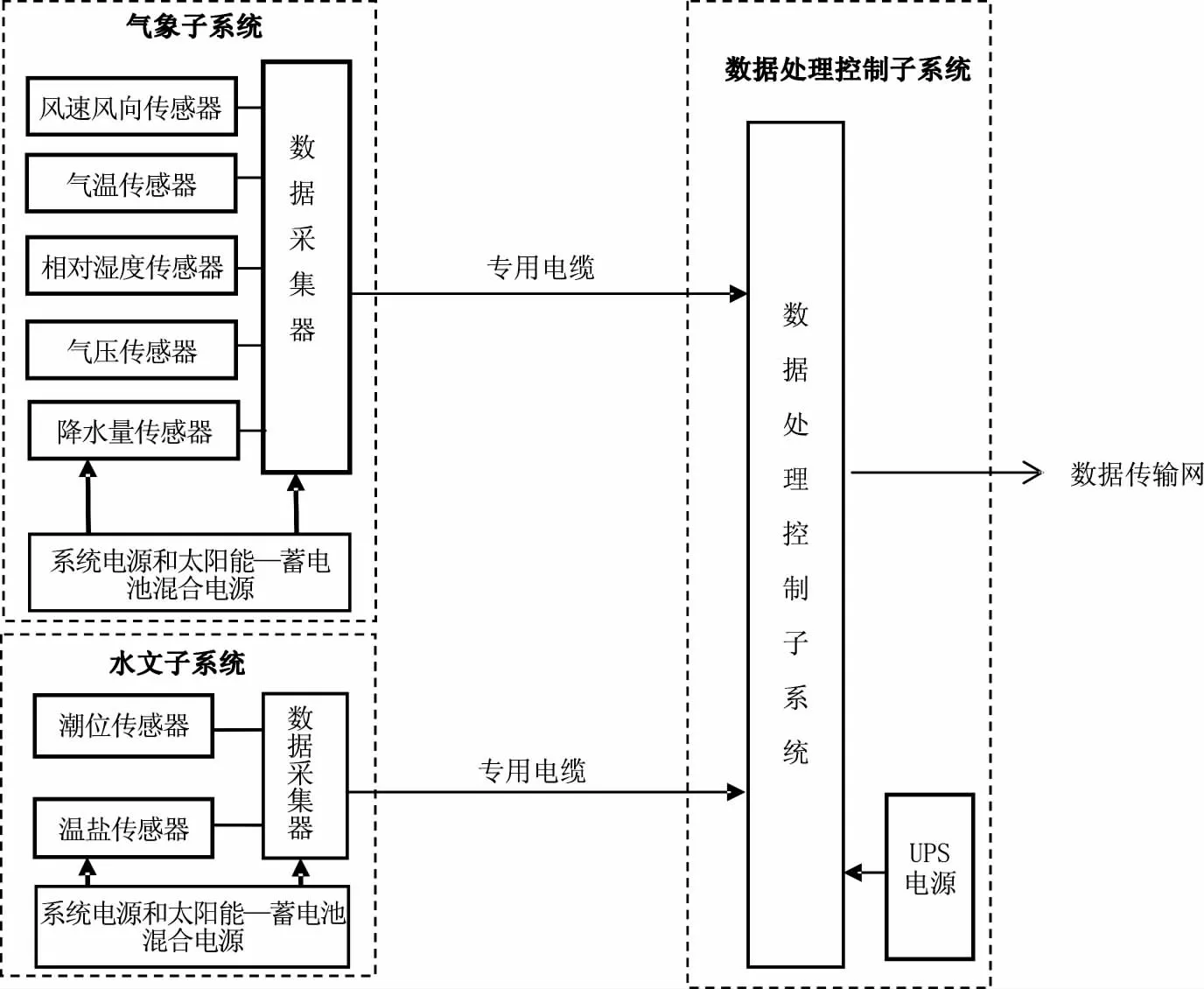
图2 岸站系统框图
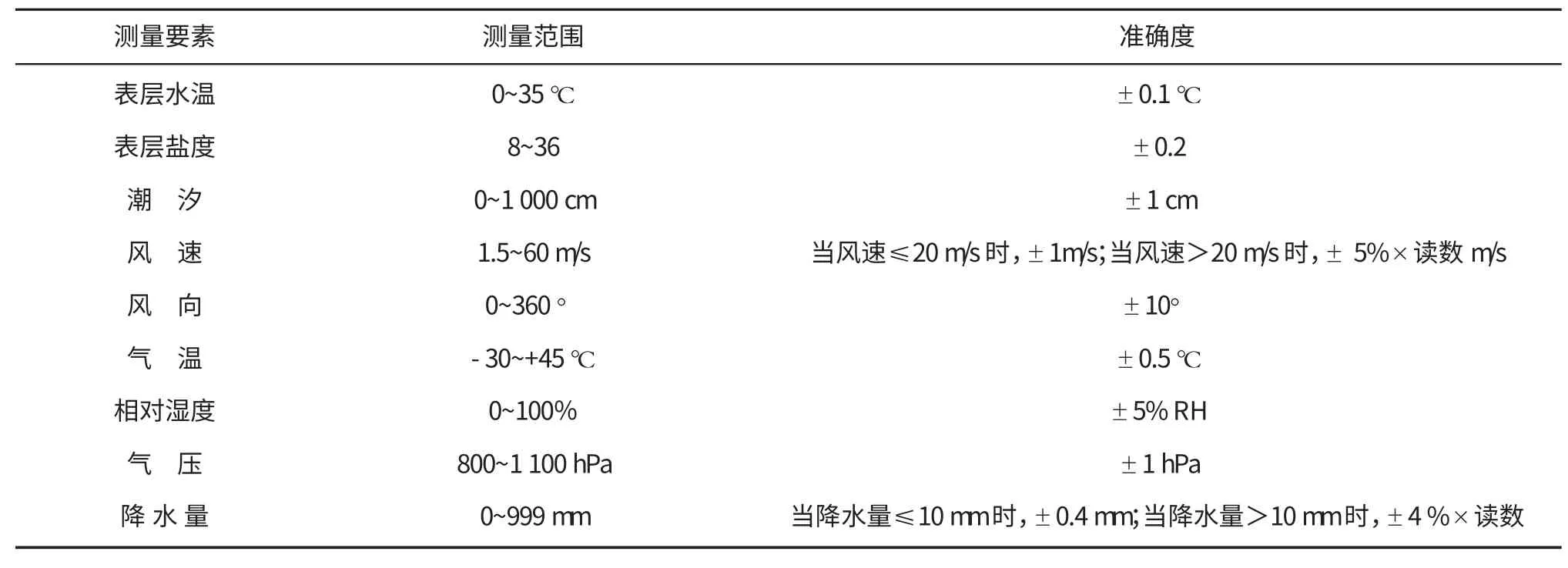
表2 系统测量要素、范围和准确度
2.1.3 数据处理控制子系统
子系统自动接收、处理、存储、显示各子系统传来的数据;自动生成报文、月报表等文件,并将数据传入数据传输网。
2.1.4 测量要素、范围和准确度
测量参数技术指标如表2所示。
2.2 监测系统设计
气象参数通过设立在岸站上的高性能传感器进行测量,潮位和表层温盐等水文参数通过岸站配置的“验潮井”和“温盐井”测量。测得数据通过数据采集器分类,传输给数据中心,其集成方式是由安装在值班室的工控机采用专线方式连接各子系统。
风速传感器采用WS425A型超声风传感器,其加热功率可达到150 W,保证在室外寒冷环境不出现凝露、冻结等情况;三变换探头避免了风向变换对数据精度的影响;数据通信采用专用光缆,保证数据传输可靠。
温度、相对湿度传感器采用HMP155A型传感器,该传感器外壳为聚碳酸酯材料,外壳防护等级为IP66,可有效防止灰尘进入传感器内部,并具有良好的防溅水性能。内部相对湿度传感器为HUMICAP 180R,这种聚合电容薄膜传感器测量准确度高,使用寿命长。
降水量由VRG101型雨量计测量,可在全天候条件下使用,在传统雨量计效果不佳的最恶劣的气象环境下,也能有效测量降水情况。
气压传感器采用PTB210气压传感器,外壳采用IP65保护,防水溅。
水位计选用VE211254雷达水位计,表层温盐仪选用ACTW-RS型温盐仪。
2.3 数据采集通信与处理系统设计
由测量仪器、气象子系统数据采集器、水文子系统数据采集器和数据处理控制子系统构成了岸站系统数据实时传输链路,数据通信采用专用电缆形式,保证了数据传输的可靠性。气象子系统和水文子系统每隔1 h采集一组数据并通过数据实时传输链路将最新数据传送回值班室的数据处理控制子系统。
各子系统的数据采集器可对各个测量仪器测得数据进行存储,同时数据处理控制子系统存储并处理各子系统传输的数据。这种在采集端和终端均进行数据存储,互为备份的方式可保证测量数据的完整性。
数据处理控制子系统由ASC-2428P工控机实现实时测量仪器控制与数据处理,并通过监测系统软件实时显示当前全部测量数据的时间序列图,同时对接收的数据进行初步质量控制,内容包括剔除粗大误差、测量值上下限检查、时间连续性检查、传感器不变性检查等。这种方式可提高测量数据的质量,保证分析结果的有效性。
2.4 供电模块设计
岸站系统的供电采用系统供电和太阳能供电双备份的供电方式,辅以一定容量的蓄电池组,保证采集系统的正常工作和采集数据的完整性。选用的ZYG4型电源由蓄电池、充电控制器、太阳能电池板和机箱组成,电池容量100 Ah。
3 波浪骑士
波浪骑士是波高和波向测量的世界标准。它具有精确的稳定平台传感器,采用一个加速度计测量波高。在波向方面,直接测量纵横摇而不需积分。
3.1 系统组成
系统的基本组成包括:浮标体、Datawell稳定平台传感器、3D磁通量罗经、X/Y加速度计、温度传感器、512 MB闪存盘、LED闪光灯、GPS、高频发射器、太阳能供电系统、雷达反射器和电池。
3.2 主要功能及技术指标
(1)实时波高测量,每0.5 h向岸站输出波高和波向谱数据;
(2)高频通信范围高达50 km,可覆盖整个试验场区;
(3)配有GPS,可实时测定浮标位置,并通过远程控制软件观测;
(4)大容量电池可在所有波浪条件和天气环境下安全可靠地连续工作1 a,无需更换;

表3 波浪骑士测量参数分辨率及精度
(5)原电池系统结合太阳能板,可以使工作时间延长至少100%;
(6)测量参数技术指标如表3所示。
4 中型多参数监测浮标设计
中型浮标系统通过搭载的传感器进行各种环境参数的测量,由浮标数据采集处理控制系统完成数据采集、处理、存储、传输和过程控制,数据由通信系统发射到岸站接收,以完成海洋环境参数的现场测量和实时数据传输。
4.1 系统组成
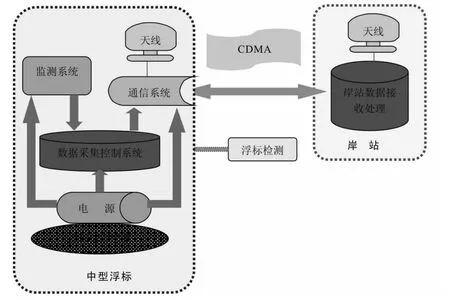
图3 浮标系统的组成框图
浮标系统的基本组成:浮标体及系留系统、监测系统、数据采集处理控制系统、通信系统、供电系统和岸站的数据接收处理部分如图3所示。
4.2 主要功能及技术指标
(1)标体直径:2.4 m;
(2)水表仪器安装井:4个;
(3)最大摇摆角≤35°;
(4)锚系方式:单点系留;

表4 中型多参数综合监测浮标使用环境
(5)数据通信:CDMA通信,北京时间正点采集;
(6)数据接受率:正常情况下(指布放站位具备良好的通信信号),全年数据平均有效接收率≥95%;
(7)海上连续工作时间:1 a;
(8)浮标使用的环境参数如表4所示。
4.3 浮标体及系留系统设计
标体采用圆盘型泡沫材料,既具备圆盘形浮标随波性好、储备浮力大、抗恶劣环境能力强的特点,同时下部的收缩圆台保证了浮标能较好地保持垂直姿态和稳性,减少摇摆对数据传输和参数测量的影响。
标体主要由上压板、仪器舱、浮体和支撑座组成。上压板为圆形高强度铝板,其四周设有4个圆孔。仪器舱为一个密封圆筒,底部设有蓄电池固定装置,其上部设有波浪传感器安装基座;仪器舱两侧设有电源控制系统和数据采集控制系统的固定座,顶端设有舱盖。浮体由不吸水闭胞弹性泡沫材料制造,外表面喷涂聚脲弹性材料,内有合金骨架,增强浮体的强度,使浮体具有良好的抗挤压和撞击能力,重量轻,便于安装及维护。为增加浮标的稳性,在浮标体下方设计一个支撑座,由钢质材料的圆管连接组成一个支架来支撑浮标。
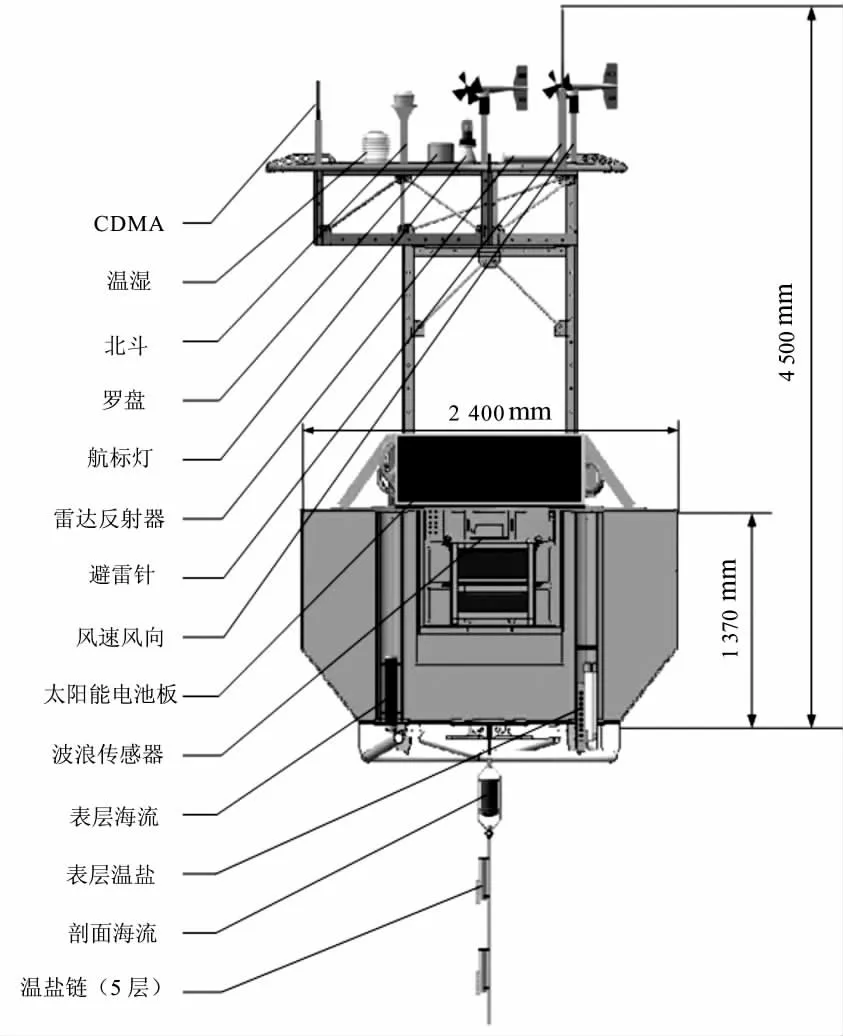
图4 2.4 m 浮标体结构示意图
标体上部的塔架由高强防锈铝合金型材构成,基架上部配有仪器安装平台,可用于安装风传感器、通信天线、航标灯、避雷针等。太阳能电池板紧贴标体甲板安装,减小了风阻力对浮标垂直向上姿态的影响。具体的结构示意图如图4所示。
系留系统为单点系泊,锚系结构为半拉紧式。系留系统由包塑钢丝绳、转环、连接件、锚链、锚等组成。它的作用是提供一个稳定的系泊力,使系统能够在恶劣的海洋环境中长期系泊定位,不走锚,不断缆。
整个浮标采用模块设计,塔架、仪器舱、浮体、支撑座和锚系各自独立,为浮标的运输、布放和后期维护提供了便利。
4.4 监测系统设计
监测系统由3部分组成:
(1)搭载在浮标上部塔架的气象子系统用于测量海上风速、风向、气温、相对湿度、气压等数据。风速风向传感器采用我中心生产的XFY3-1B型传感器,其风速测量用螺旋桨带动六磁极转动,感应出交流正弦波信号,频率与风速成正比,风向测量用精密导电塑料电位器,尾翼转动时,电位器输出与风向对应的直流电压。相对湿度、温度测量使用41382型传感器,其相对湿度采用高精度的电容式传感器,温度采用RTD铂电阻传感器。气压传感器采用61202型传感器。
(2)仪器舱以及锚系上安装的波浪传感器、温盐传感器和海流计用于测量表层温盐、表层海流、波浪、剖面温盐和剖面海流等水文参数。波浪测量采用SBY1-1型波浪传感器,该仪器使用先进的三轴加速度计与数字积分算法,精度高、可靠性高、稳定性好、功耗低。海流表层测量采用Nortek“小阔龙”声学多普勒流速仪,海流剖面测量采用声学多谱勒剖面海流计RDCP600。表层温盐和剖面温盐的测量采用国家海洋技术中心生产的SZC15-2IM感应传输式温盐深传感器,传感器由温度探头、三电极电导池、数据采集板、感应耦合数据传输模块组成。
(3)塔架上安装的TCM2.5倾斜补偿式3轴罗盘可用于测定浮标方位。
具体测量参数技术指标如表5所示。
4.5 数据采集处理与控制系统设计
浮标系统可对传感器和电源设备进行检测,并利用检测器完成对数据采集处理控制系统的初始化设定。数据采集处理控制系统在预定的时间内,给传感器加电,指示传感器开始进行测量,传感器测量结束后,自动把测量数据传输给数据采集控制系统。随后,系统按规定的时序和时间给处理模块加电,处理数据,计算各平均值、特征量,并存储数据处理结果,按格式组织编排报文。最后,给发射模块加电预热,到规定的时间将处理模块组织的数据发射至岸站,完成了一次数据的采集处理与传输。工作流程如图5所示。
空闲时数据采集控制系统仅有值班电路工作,其余部分关闭,传感器每采集完一次数据就会切断电源,同样数据处理和数据发射过程结束之后也会切断相应模块的电源。这样设计可以有效降低功耗,延长系统电池使用寿命。
4.6 通信系统设计
浮标系统在数据采集处理完成后,将数据和浮标状态参数传送至岸站。监测数据采用实时存储,定时发送方式;数据采集周期为1 h,数据通信时间为每小时的正点,每小时发送一次。同时考虑浮标主要工作在近岸海域,因此在通信方式上采用目前国内比较成熟的CDMA通信网络。CDMA通信工作在800 MHz频段,可以使用较短天线,便于浮标设计,同时我国近岸和岛屿上通常建有基站,CDMA通信方式基本可以覆盖50 km海域。
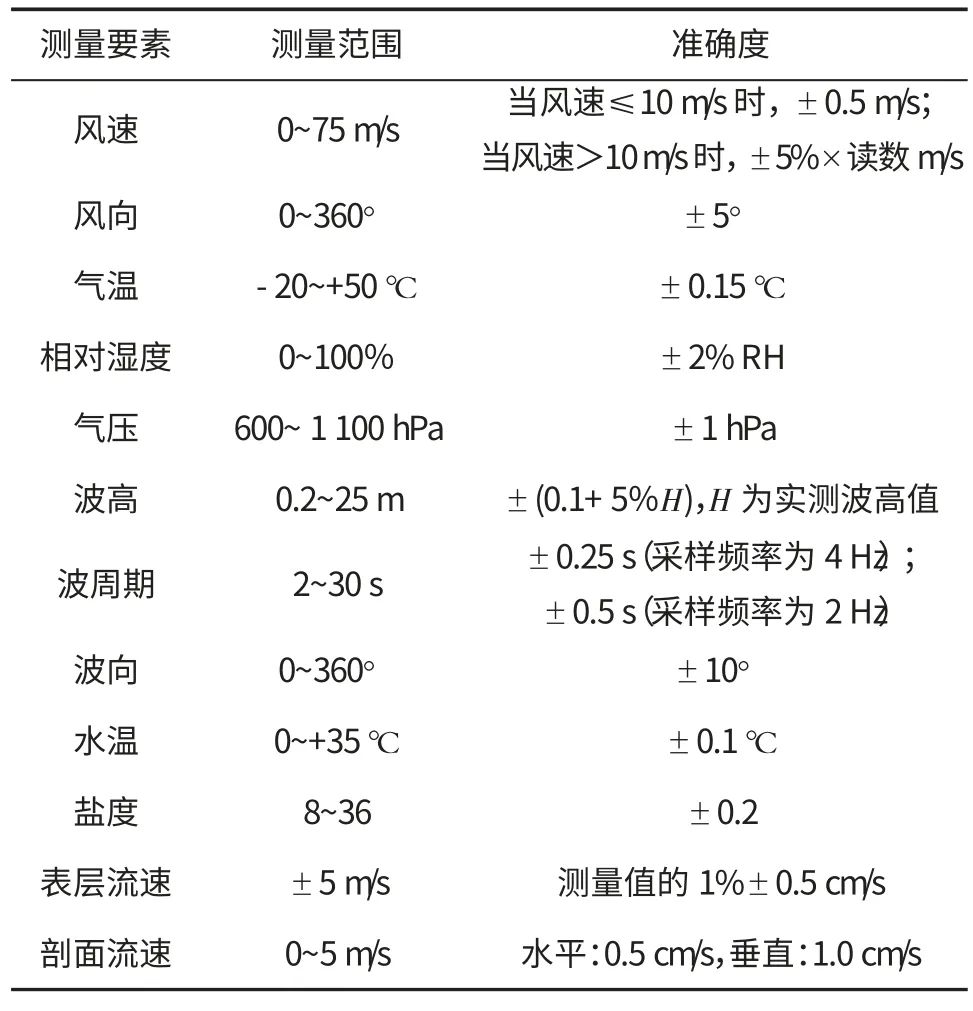
表5 中型浮标测量要素、范围和准确度
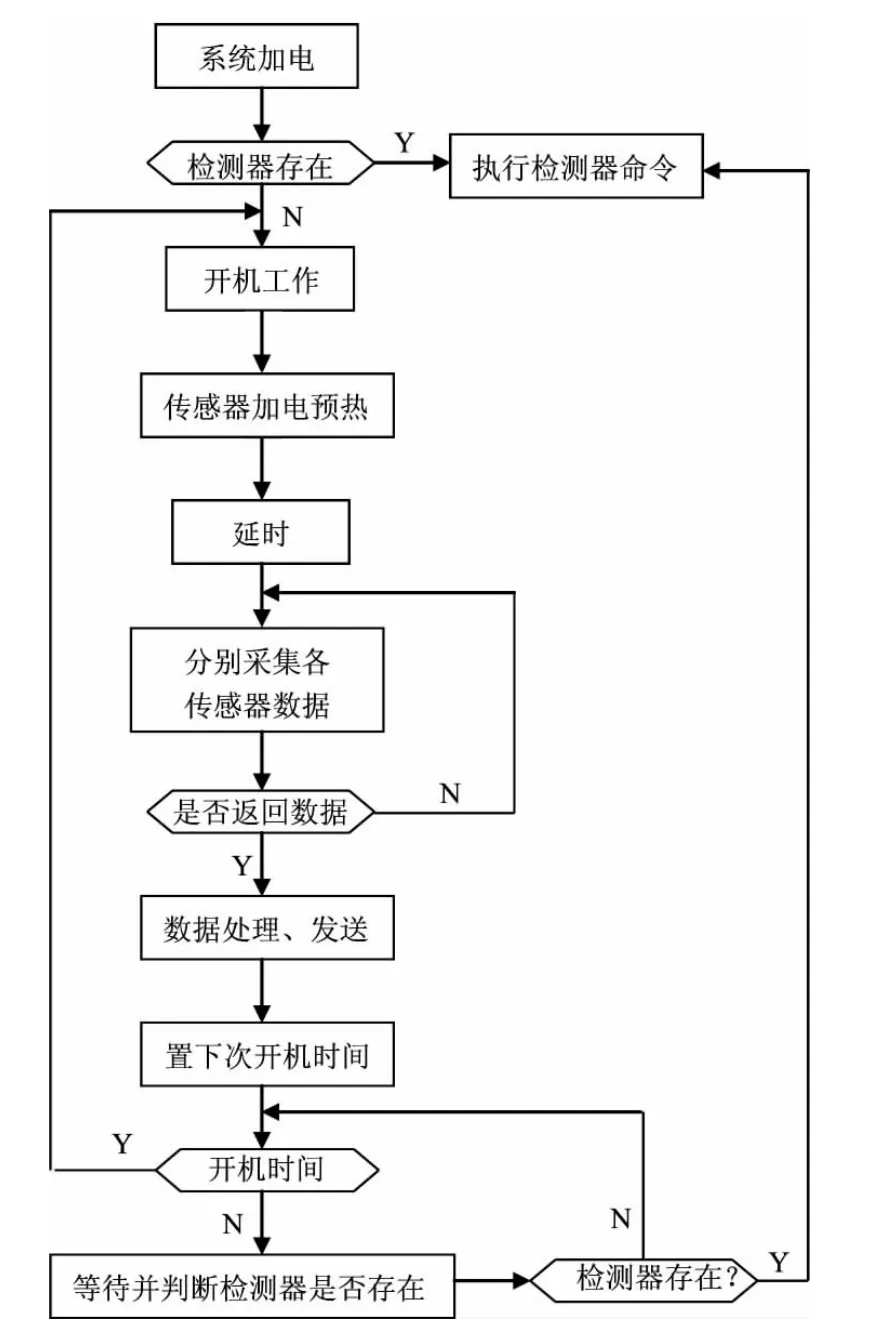
图5 数据采集处理控制系统工作流程图
4.7 供电系统设计
为确保浮标系统在较恶劣海况下能够连续、可靠地工作,供电系统由高容量、高质量、体积小、可充电的蓄电池和太阳能电池板组成。蓄电池放置在仪器舱内,太阳能电池板安装在浮标塔架周围。太阳能电池板为蓄电池充电,保证蓄电池为浮标上各种电气设备的供电。综合考虑浮标搭载仪器及数据采集通信设备的功耗,共需4块60 W太阳能电池板为4块200 Ah的蓄电池充电。供电系统组成如图6所示。
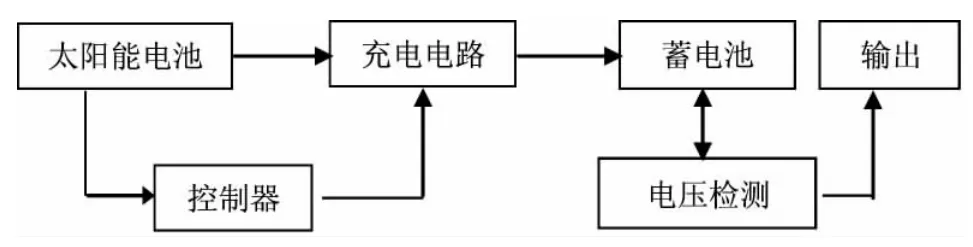
图6 供电系统组成
5 大型海洋资料浮标设计
大型海洋环境监测浮标标体直径为10 m、全锚链、单点系泊,用于测量试验场平均风速、平均风向、瞬时最大风速、气压、气温、相对湿度、波高、波周期、波向、多层水温、盐度、海流剖面、水质和浊度等海洋环境参数。浮标采用低功耗微机控制,对各观测项目进行数据采集、处理后,将数据通过卫星通信系统实时传输给岸站。
5.1 主要功能及技术指标
浮标每天整点工作8次,当风速或波高超过某一阀值时,则自动加密观测改为每小时工作1次,超限值可人工设置;与岸站实时通信,数据接受率≥95%;海上连续工作时间不少于2 a。
浮标体主尺寸及参数:
顶面直径:10 m;底面直径:6.5 m;排水量:约51 t;吃水:0.95 m;型深:2.2 m;稳性衡准数>1.6;自摇周期<3.0 s;拖曳速度:8 kn。
5.2 结构设计
浮标采用单点系泊方式,锚泊系统为全链式锚系。锚系在现代的锚系技术发展基础上进行了优化设计,并考虑了水下仪器的吊挂及收放。浮标体设有ADCP海流计井、温盐链投放井以及潮位传感器安装井,浮标的上层部分为适应多层气象参数观测要求进行设计,并充分考虑了浮标的稳性、强度和安全要求。浮标结构图如图7所示。
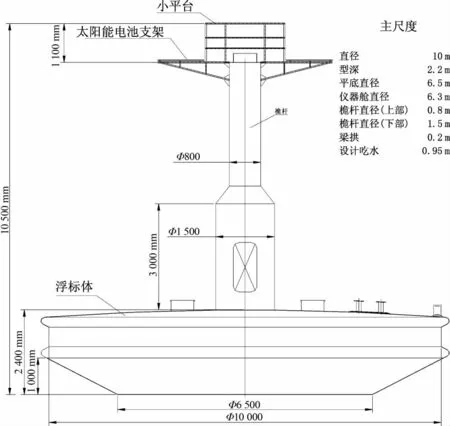
图7 浮标结构图
5.3 数据采集与通信系统设计
数据采集处理系统采用PC/104总线、INTEL CPU完成对各种传感器和通信设备的数据采集、发送、接收及加断电控制,采用PCMCIA存储卡作为浮标非实时数据的存储设备。采用Inmarsat-C卫星通信方式,保证实时资料的有效接收率可达到95%以上。数据传输内容包括有效波高、1/100最大波高、有效波周期、最大波周期、瞬时最大风速、10 min平均风速、风向气温、气压、水温、舱温、方位表层流速、流向锚灯状态、门警、水警、电池电压等要素。
5.4 供电系统设计
供电系统采用太阳能电池配合大容量免维护蓄电池的电源组合方式。单一直流供电,电压范围:14 V±2 V。设备总功耗日耗电不大于60 Ah。
6 海上应用
本文设计了一套由多个监测系统组成的多参数立体海洋环境监测系统,该系统布放于我国首个波浪能、潮流能试验场,试验场区选址在成山头海域,波浪能、潮流能资源储量丰富。
系统在设计上充分考虑了试验场的水文、气象条件,可以长期有效地监测试验场区的海洋环境参数,尤其是波浪和潮流两个能源相关参数,以及会对波浪能、潮流能发电装置试验与使用产生影响的环境参数,为试验场正常运行提供保障。
7 结论与展望
本文对波浪能、潮流能海上试验场现场监测系统中各项关键技术进行了深入研究,设计了一套适用于试验场环境条件的多参数多子系统的现场监测系统。系统具有较高的可靠性和环境适应性,可以长期服务于试验场。在实际应用中,可以调整传感器配置,为特定条件的环境监测提供服务。该系统的建成将极大促进我国首个波浪能、潮流能海上试验场建设,促进我国波浪能、潮流能技术成果的转化。
[1]李建如,徐惠平.加拿大“海王星”海底观测网[J].地球科学进展,2006,26(6):86-91.
[2]金田义行.日本先进的实时海底观测网[J].国际地震动态,2011(11):5-6.
[3]Ocean.US.An Integrated and Sustained Ocean Observing System For the United States:Design and Implementation[Z].http://www.ocean.us,May,2002.
[4]国家海洋技术中心.海洋环境立体监测系统和示范试验技术总结报告[R].天津:国家海洋技术中心,2000.
[5]国家海洋技术中心.台湾海峡及毗邻海域海洋动力环境实时立体监测系统技术总结报告[R].天津:国家海洋技术中心,2005.
[6]罗续业,周智海,曹东,等.海洋环境立体监测系统的设计方法[J].海洋通报,2006,25(4):69-77.
猜你喜欢
家教世界(2023年4期)2023-03-04
石油沥青(2022年3期)2022-08-26
学苑创造·A版(2022年4期)2022-06-18
垂钓(2022年3期)2022-05-14
舰船电子工程(2021年5期)2021-06-04
当代陕西(2020年24期)2020-02-01
垂钓(2019年2期)2019-09-10
小哥白尼(趣味科学)(2018年12期)2018-12-18
测控技术(2018年10期)2018-11-25
无人机(2018年12期)2018-09-10
