无人机航测技术在输电线路中的应用实践
2013-08-06 15:26:02杨永平段学云段德磊徐春陈鸿兴
城市勘测 2013年1期
杨永平,段学云,段德磊,徐春,陈鸿兴
(云南省电力设计院,云南 昆明 650051)
1 引言
随着我国现代化建设进程加快,工业与民用电量不断增加,电力工程建设力度也随之加强。除超高压、特高压和跨区电网等大型工程快速建设外,一些局部改线、π接或T接线路工程也越来越多,此类工程规模虽小、路径较短、但工期要求特紧。如采用常规工测技术,不仅劳动强度大、作业周期长、生态环境破坏大,而且无法满足整体电网工程的信息化建设及智能电网建设的长远要求;如采用传统航测技术,由于空域管制办理手续繁琐、机动性差,导致周期较长、成本较高,特别像云南这样的高山省份地区:海拔一般在2000 m以上,高差较大,天气多变,交通不便,无疑难以满足工程要求。然而,近年来随着无人机、数码相机技术及无人机航测数据处理软件的快速发展,无人机航测技术已基本成熟,正好符合了这一要求,因此该摄影测量技术应用已成必然趋势。本文叙述无人机航测技术具体应用于输电线路工程,并取得了良好效果。
2 无人机航测技术
2.1 无人机航测系统
如图1所示,无人机航测系统主要由无人机飞行平台、飞行控制系统、影像获取设备、通信设备、遥控设备和地面信息接收与处理设备组成。其中,飞行控制系统主要包括:稳定飞行姿态的垂直陀螺,获取飞行平台位置信息的GPS接收天线以及控制飞机自主飞行的微处理器。地面配套设备主要包括:实时影像的接收与显示的数据接收终端,数码相机获取的地面高清影像的数据处理终端以及控制飞机起降、飞行和拍摄的遥控设备。
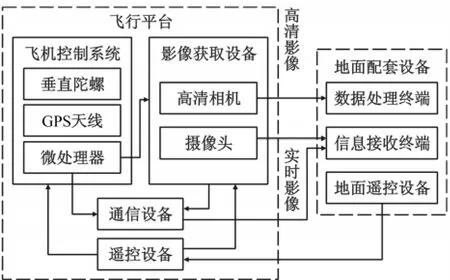
图1 无人机航测系统
2.2 无人机航测技术特点
无人机航测技术,以获取高分辨率数字影像为应用目标,以自动驾驶飞机为飞行平台,以高分辨率数码相机为传感器,通过3S技术在系统中集成应用,最终获取小面积、真彩色、大比例尺、现势性强的航测遥感数据。其技术特点主要有如下:
(1)无人机数据处理流程与传统航测相比,具有以下特点:①采用非量测数码相机,镜头畸变较传统航摄仪大;②低空宽视角,因视点变化的原因,影像四周地物几何变形大,特征匹配难度大,有效匹配率低;③低空、宽像幅且高重叠度,影像数据量大;④虽采取了一定防范措施,但仍免不了出现大的旋偏角,常有超出±15°规范要求的情况。
(2)升降灵活,环境要求低,野外作业方便。目前国内使用的超轻型飞机中均不必使用专门的机场和跑道,在100 m~200 m长的周围较空旷的公路或硬草地即可起降。
(3)一般作业区域航高低于1000 m,属于低空、超低空,除机场附近、边境附近等特殊区域外,可避免办理空域申请,机动性强,受约束少,作业简便,可在云层下实施航拍,快速获取高分辨率数码影像。
(4)安全可靠,无人驾驶自动飞行,多项控制措施保障系统安全,具备滑翔能力和弹射、伞降保护功能。
(5)地域适应性强。对于丘陵及山地,无人机具有相当大的优势,受云雾干扰影响较小,随气候变化可及时调整飞行方案,避免因气候变化的影响带来的不必要损失。
(6)成本较低。系统集成度高,运输方便,转场作业只需地面小型货车运输即可完成;无人机系统的置建费用较低,运营成本、维护成本和操作手的成本远远低于载人机系统,具有低投入、高回报的优势。
(7)考虑到无人机航测系统的续航时间短、地面监控范围小以及相片像幅小等特点,因此单架次的航摄面积不能过大,只能小区域作业。
总之,无人机航测相对于传统航测,具有快速机动、低成本、能云下摄影、受天气影响小、分辨率高等特点;无人机航摄资料存在像幅小、像对多、基线短、相对传统航摄影像旋偏较大、重叠度不规则等问题,需要采取特殊方式处理。
3 应用实践
近两年人们主要将无人机航测技术集中在大比例尺地形图数字测绘的可行性和适用性研究方面,而对输电线路勘测设计应用方面研究甚少,因此,无人机应用于输电线路工程进行路径优化及平断面测绘现在几乎没有成功先例参考。本次拟在220 kV缅甸伊江上游电站输电线路工程(国内部分)进行试验,主要原因为具有云南地区线路工程一定的典型性特征,该线路长约70 km,涉及跨江的大高差、保护区、风景区以及影响传统航拍的机场、军事区、边境等因素。因此,该线路工程作为试点可使试验的作用最大化,优化效果结论更易获取。
本次无人机航测在输电线路的优化试验实施过程按工作内容划分,主要分为无人机航空摄影、外业控制、空三加密、优化选线、平断面测绘、外业高程拟合及校测6大部分,详细作业流程如图2所示。在优化选线过程中要完成施工图设计前期工作,包括转角及塔位坐标成果、影像路径图、跨越及拆迁统计、杆塔规划等工作。

图2 无人机航测优化作业流程
3.1 航空摄影
无人机航拍单航带覆盖带宽与精度有着直接的关系,航高越低,带宽越小,精度越高。而为保证线路选线的需求,又要求带宽越宽越好。虽然可通过航拍多条航线形成区域网的形式来增加带宽,但此方法将增加大量的内外业工作量,延误工期。因此,依据220 kV缅甸伊江上游电站输电线路工程初步设计路径图,试验中将尽可能采用单航线航拍的方法进行,个别线路经过困难区域考虑双航线。结合Google Earth卫星影像在1∶25000地形图上共设计了16条航带,在地形图上图解出每一条航带中心线起终点经纬度值,分2个架次进行航飞拍摄,摄影比例尺为1∶5000。
本次试验飞行平台采用Quickeye(快眼)-Ⅲ型无人飞机,机长2.3 m,翼展3 m,机高0.49 m,具有起降容易、机舱容量大、续航时间长(3 h~4 h)等特点,为优越的航拍摄影飞行平台。
无人机所用的数码相机一般属于非量测相机,镜头畸变差较大,需要建立试验场或到专门的检校机构进行严格的专业检校,从而获取相应的畸变改正参数。因此,数码相机检校是数码航测的基础性工作之一。本次摄影相机采用性能优越的Canon EOS 5D MarkⅡ(36 mm×24 mm)数码相机,信息采集精度一般在0.1 m~0.4 m高分辨率。为了保证航测成果精度,在开展本试验项目前对5D MarkⅡ相机进行了严格检校,其相关参数如表1所示。

相机相关参数 表1
3.2 外控与调绘
根据无人机像幅小、重叠面积大、像对多、基线短等特点,在220 kV缅甸伊江上游电站输电线路工程试验中,共完成16条航带的像控点测量和终勘定位所需的基准点测量,布设133个控制点(包括像控点120个,基准点13个),相邻像对点间的基线间隔数限制为8条。
外业采用GPS快速静态作业模式,网型采用图型强度较高的边连式,起算点采用6个稳定可靠的GPS C 级点(YB05、M002、M003、M006、M015、M021)。坐标系统采用1954年北京坐标系,中央子午线为99°,高程系统采用1985国家高程基准。并完成相应线路路径的调绘工作。
由于无人机影像数据分辨率较高,内外业判读准确,因此很大程度上减小了像控刺点、内业辨视的误差,提高了后期成图的数学精度。
3.3 内业处理
适普软件与武汉大学最新研发的VirtuoZo TM低空小数码数据处理软件作为低空影像数据处理软件,已在国内测绘行业得到广泛应用。本试验工程采用全数字摄影测量系统VirtuoZo软件进行内业处理,空三加密软件采用PixelGrid无人机空三加密系统,主要过程为:建立工程、空三加密、数字高程模型(DEM)生成、外业调绘资料录入、正摄影像图制作。
3.4 优化选线
目前国内在电力方面的应用航测系统有海拉瓦优化平台、适普VirtuoZo EPIGS电力优化平台以及JX4平断面联机测图系统。由于武汉适普软件VirtuoZo EPIGS电力版优化选线平台已开发完善多年,具备较成熟的主体框架,选取该优化选线平台进行内业优化选线。
无人机航测优化,以缩短线路长度、避让障碍、减少耐张塔数量为基础,最终以减少工程投资、提高线路运行安全稳定性为目的。在将航测数据应用于电力线路设计方面,各专业设计人员可采用立体浏览方式,实现立体像对快速漫游甚至无间隙漫游进行优化选线。通过优化选线平台仔细观察路径两旁的地物和地貌,利用架空送电线路平断面自动量测软件EpMapper进行量测对线路有影响的地物到路径的距离以及陡峭地貌的坡度,及时了解局部地段立塔条件是否具备,能否跨越电力线等,从而确立路径的成立与否达到局部最优。通过计算机自动排位优化软件对全线进行优化排位和投资估算,以达到整体优化。
由于立体影像可按设计人员要求放大或缩小进行漫游,目标清晰,视眼开阔,这样便可以“瞻前顾后”、“左顾右盼”,做到“线中有位”,“以位正线”,达到“室内终勘”的深度。
3.5 精度分析
线路平断面的最终精度受内业测图、外业高程拟合、关键点校测三方面的因素影响,最终得到的平断面图才是满足施工图设计要求的平断面。
本次试验外业共采用GPS RTK实测转角和塔位桩32个,断面点234个,合计266个点参与高程误差数据分析。分3次获取高程差值,第1次为不进行任何拟合时的高程差值,第2次为仅转角和塔位桩参与高程拟合以后的高程差值,第3次加入约140个实测断面点进行拟合后的高程差值。由于北京洛斯达公司研发的《架空送电线路设计软件》(简称TL软件)高程拟合功能较为成熟,此次平断面高程拟合处理软件采用TL软件。经分析汇总,得到精度统计如表2所示。

精度统计 表2
由表2可知,采用无人机航测技术,经选取一定的高程实测点进行拟合后的线路平断面图完全满足线路勘测设计要求。对照路径正摄影像图和实地情况发现,无人机航测技术类同传统航测技术,在植被稀少或裸露地面,断面点高程精度容易符合电力行业航测规程要求;植被覆盖较密的地段桩位误差较大,甚至出现严重错误。因此在森林覆盖厚密的地方,采用无人机航测技术必须在野外校测和补测,经拟合处理后才能确保航测平断面图的质量。
经对测图数据的分析与校对可知,0.2 m~0.25 m分辨率已经足够平断面测图的精度,甚至局部可达到1∶2000地形图测图精度。因此,在云南一些高山地区实施的线路工程设计,可将分辨率进一步降低至0.3 m左右,从而使得所加载大像幅相机单航覆盖进一步增大,可达到1800 m~1900 m带宽。因此,无人机航测技术在输电线路应用上已无障碍,但需在应用过程中逐步完善。
4 结语
通过以上无人机航测技术在220 kV缅甸伊江上游电站输电线路工程中的应用实践,可得如下主要结论:
(1)无人机航测系统,具有“三高一低”的重要特性(高机动性、高分辨率、高度集成、低成本),无人机航测技术用于电力线路勘测工程,从技术上来说,具有可行性。
(2)由于非量测相机镜头畸变大、影像像幅小、内外业工作量成倍增加等不足,其应用上也有一定的局限性,只可作为传统摄影测量手段在输电线路工程应用中的一个较好补充。但相对于电力线路勘测中的常规作业方法具有较大优势,有利于数字化电网三维基础数据的积累。
(3)由于无人机航测技术的发展既继承了传统航测的诸多优点,同时弥补了传统航测在输电线路工程建设方面的不足。在电力工程建设快速发展,小型输电线路工程工期紧迫的情况下优势更为明显。
(4)现阶段无人机航测技术正处于从研究开发阶段向推广应用阶段过渡,如能进一步解决加载大像幅(如飞思P45或P60等相机)/多镜头数码相机、高精度定位与控制系统(DGPS/IMU)的问题。无疑随着系统配套软硬件的加强与完善,其安全性和实用性将得到进一步提高,其美好而宽广的应用前景将不言而喻。
[1]张祖勋,张剑清.数字摄影测量学[M].武汉:武汉大学出版社,1997.
[2]胡开全,谢征海.基于低空遥感数码影像制作山地区域1∶500地形图的探索[J].城市勘测,2008(3).
[3]王佩军,徐亚明.摄影测量学[M].武汉:武汉大学出版社,2010.
[4]郑彦春,彭丹青,贾高毅等.无人机摄影测量技术用于电力勘测工程中的试验研究[J].电力勘测设计,2010(S1).
[5]刘奇志.低空摄影测量与三维建模[D].山东科技大学硕士学位论文,2005.
[6]段学云.电力工程勘测设计无人机航测优化辅助系统试验研究报告[R].昆明:云南省电力设计院,2011.
猜你喜欢
韩国语教学与研究(2022年3期)2022-02-08 06:04:52
当代陕西(2020年23期)2021-01-07 09:24:44
测控技术(2018年6期)2018-11-25 09:50:12
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
通信电源技术(2016年5期)2016-03-22 01:09:55
电力自动化设备(2015年4期)2015-09-28 02:43:02
电测与仪表(2015年12期)2015-04-09 11:44:44
电测与仪表(2015年12期)2015-04-09 11:44:20
全球定位系统(2015年4期)2015-02-28 12:38:13
浙江国土资源(2014年5期)2014-04-28 09:04:19