多光谱手指静脉采集系统的优化设计
2013-07-31 07:35:46杨金锋吕恩春
中国民航大学学报 2013年2期
杨金锋,吕恩春
(中国民航大学天津市智能信号与图像处理重点实验室,天津 300300)
手指静脉识别凭借其特有的优越性在生物识别领域倍受关注。然而单光谱手指静脉成像模式已经无法充分利用人体不同对象生物组织的光学特性[1-2],这也会影响真实手指静脉特征信息的分析与提取。因此,对于手指静脉识别来说,探索多光谱手指静脉成像模式具有重要的理论与实际意义[3-6]。本实验室较早地提出了多光谱手指静脉成像理论并对其展开深入研究。已经初步设计出多光谱手指静脉成像与采集系统[7],为多光谱手指静脉识别奠定了数据基础和实验环境。这对促进手指静脉识别技术的发展具有重要意义。然而该系统尚欠完善,存在3个问题:①该系统LED光源控制电路较为复杂,且经常出现控制失败等故障;②系统的光源光路结构问题始终没有解决,光线不能均匀聚集在手指上方,致使静脉成像质量有较大变化;③该系统在采集的时候,LED的点亮和亮度调节还要单独用串口通信助手来完成,每次都要手动编写命令发送命令,这样造成采集步骤比较繁琐,无法实现对多光谱图像的自动采集。因此本文从这3个问题出发,设计出较为简单有效的光源控制电路,对光源结构形式进行了重新设计,并设计了新的采集装置外壳,在新硬件的基础上将光源亮度调节的串口通信过程嵌入采集软件系统,建立了新的较为完善的多光谱手指静脉采集系统。通过较为详细的比较试验,验证本文设计的有效性。
1 多光谱手指静脉成像系统
本文设计的手指静脉成像系统主要包括光源控制电路的优化和采集装置外壳的优化设计。
1.1 光源控制电路的优化设计
多光谱光源控制电路的设计要实现两个主要目的:①实现多波段光源发光的顺序控制;②实现光源发光强度的量化控制。顺序控制的目的是为了获得不同波段下的手指图像,量化控制的目的在于设定光源的发光强度以适应手指尺寸大小变化的实际情况,避免单一LED光源辐射峰值波动。因此,光源控制电路设计要围绕这两个主要目的来研究实现。
在文献[7]中,光源控制电路主要是由单片机控制数码管驱动芯片CH452A驱动LED阵列,单片机用的是PLCC封装的AT89C52,该芯片现已经停产。重要的是C52烧写程序时需把芯片从线路板上抠下来放到编程器上之后再放回去,极不方便。另外用CH452A驱动LED阵列控制程序比较复杂。
针对以上问题,设计优化策略是电路尽量简单,电路板体积尽量小。故重新设计光源控制电路:
1)用DIP封装的单片机AT89S52代替AT89C52,其好处是S52可在线编程,非常方便,并且还便宜。
2)本文设计放弃使用数码管控制芯片CH452A驱动,采用单片机直接控制驱动LED阵列,这样使得电路更为简单实用。
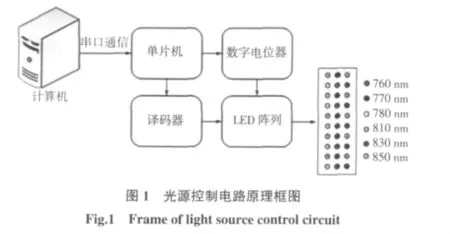
优化后本电路的实现原理如图1所示,LED发光强度的控制由数字电位器芯片限流实现,计算机对多光谱LED发光顺序和数字电位器开关量的控制通过USB总线转接芯片CH341T实现R485通信,译码器的作用是点亮共阳极的LED阵列。图2是完成的电路板。
1.2 光路结构的优化设计
手指成像效果依赖于光在手指组织介质中的传播状态,影响光传播状态的外界因素则是入射光的结构模式和照射模式。因此光源结构和光路形式设计是满足系统成像条件的一个基本研究内容。
医学研究已证明[8],波长在700~900 nm的近红外光对生物组织具有最强的穿透能力。因此设计中的手指静脉成像光谱也选择了这个范围。考虑到近红外LED输出峰值一般有动态变化,采用正常输出峰值在735~870 nm之间的LED作为近红外光源。本设计中近红外光源LED阵列由三排线阵构成,每排包含两种光谱,分别为760 nm与780 nm、770 nm与830 nm、810 nm与850 nm这3组,每排2个光谱间隔排列。
LED光源虽有指向性,但指向性并不高,不能集中穿透手指,即有较多余光发散到空间反射回来影响成像质量。如图3所示,如果3排LED阵列平行排列在平面上,那么3排LED光线是平行照在手指的不同位置上,而不是集中打在手指正上方,由图3(a)模式可知只有中间那排灯照在手指的正上方,旁边2排会打在手指边缘,这样采集出的图像会出现局部偏亮的情况,如图4(a)所示的就是原装置采集出的图像。

针对光照不集中的问题,本文的设计策略是将3排LED阵列排列在凹面上,如图3(b)所示,图3(b)的原理是,假设 3 个 LED 的发光角分别为 θ1、θ2、θ3(其中θ1≈θ2≈θ3),距离为 △d。若使 3 个 LED 发出的光能聚集在中间LED下方的中心位置上,根据三角形和圆的有关知识,它们应该位于半径为h(其中h为LED的指向距离)的圆周上。先将右侧LED的位置在中点处向下倾斜 θ角,计算得 θ=(θ2+ θ3)/2 ≈ θ2,左侧同理。这样如果把手指放在图中的中心位置上,光就可集中打在手指上。本文就是基于这样一个原理来设计的。
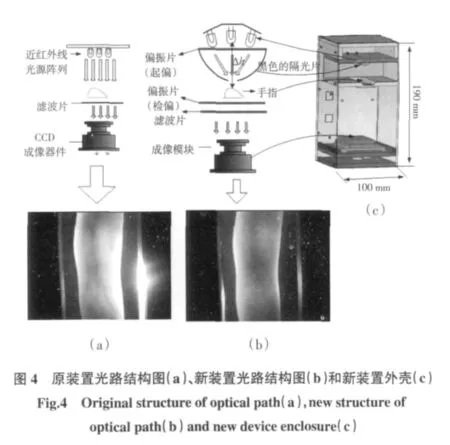
最后给出本文设计的采集装置基本构造,如图4所示。图中给出了原装置的光路结构图、新装置的外壳以及内部光路结构示意图,原装置的光源光路结构是平行排列在平面上,缺点上文已陈述,现重点介绍本文设计的外壳内部构造,如图4(b)所示,根据外壳图4(c)可以看出这是个纵切面,上面3个LED代表排列在凹面上的三排LED阵列,手指就放在距离中间排LED为Δh的位置上,在光源的下方,为了能够保证光线更好的聚集照射,用两片对称的隔光片将光挡住,中间留出一条缝隙,这条缝隙的大小设计成了可调方式,这样保证了光从这个缝隙中集中射出。从图4(b)中可以看到,还使用了滤光片和偏振片,滤光片的作用是滤除700 nm以下的杂光。
偏振片对入射光具有遮蔽和透过的功能,可使纵向光或横向光一种透过,一种遮蔽。一般成对使用,自然光通过偏振片后成为线偏振光,线偏振光的振动方向与偏振片的偏振化方向一致,在这里偏振片起着起偏器的作用,故称为起偏片;偏振光通过偏振片后在转动偏振片的过程中,透射光强度发生变化,在这里偏振片起着检偏器的作用,称为检偏片。这里用它是为了抑制光的散射。
另外,由图4(c)看到,在装置的最低端有两个旋钮,可以微调镜头位置,达到理想位置之后再将其固定,这样做的目的是使镜头调节更加方便、准确。
2 多光谱手指静脉采集系统完善
采集系统软件平台是在VC++环境下编写而成,具有手指静脉图像采集、存储建立数据库、注册、识别用户等基本功能(本文现在只关注采集部分)。
原有采集系统的工作方式如图5所示。

1)打开采集界面,并初始化;
2)打开串口调试界面,发送指令点亮760 nm的LED(如果亮度不好,需再发送指令调节);
3)转到采集界面输入用户信息,进行采集。
上面所述的是单个光谱的采集过程,6个波段都要重复采集需求响应的过程,因此重复的工作太多,采集效率相当低。针对这样的问题,本文给出的解决策略是,将串口调试助手完成的过程用C++编写成一个小的LED光源控制界面,然后嵌入到采集界面里,并且完成6个波段自动顺序采集。采集过程如图6所示,将点亮LED和亮度调节的过程转化成一个个单选按钮来完成,这样如果想点亮LED和亮度调节时,只需点击相应单选按钮即可,比较方便。

综上,经过优化后的采集界面单独就可完成整个软件功能。可以完成单个波段手动采集。另外设置6个波段间隔一定时间点亮,就可完成自动采集了。
3 结果与分析
上面已对控制电路、装置外壳、采集系统界面给出优化设计。这里给出设计好的整个采集系统如图7所示,其中LED点亮和亮度调节就是由上述的串口通信完成的,当手指放入采集装置中,采集界面中的橙色框就开始对手指轮廓进行跟踪,在手指放置恰当的时候会显示一个绿框(绿框为感兴趣区域[9-10]),此时点击图像采集按钮便可对6个波段的图像进行手动或自动采集了。
最后运用经过本文改进的多光谱手指静脉采集系统手指静脉图像采集实验,采集了一定数目的样本,抽选了一个手指的6个波段,跟原有装置的同一手指采集结果进行比较,如图8所示。

通过比较可以看出,原来的图像两侧一亮一暗的问题得到了解决,光路结构也得到了有效的改善,而且现在采集的图像质量也比原来的好许多。另外在采集的过程中,本系统的使用更加的方便快捷,采集效率得到了显著提高。因此可以认为本文的设计已显成效,达到了预期的目标。
4 结语
本文的主要目的就是设计出较为完善的多光谱手指静脉采集系统,然后采集出质量较高的静脉图像,因此本文内容主要可以分为两大块:①对多光谱手指静脉成像系统进行了优化改进,首先重新设计了光源控制电路,改进了光源光路结构,设计出了新的采集装置,建立采集系统的硬件平台;②在硬件的基础上搭建了软件平台。
本文的设计成果为手指静脉识别奠定了坚实的数据基础,为后续的手指静脉处理减轻了困难。当然本设计并非完美,也有不太理想之处,如采集系统的硬件设计LED亮度控制部分:亮度等级虽有8个等级,但等级变化不是很明显,并且未能根据需要自动改变亮度,这方面还有待于进一步改进。
[1]JAIN A K,ROSS A.Multibiometric systems[J].Communication of the ACM,2004,47(1):34-40.
[2] HALL P,QIU P.Nonparametric estimation of a point-spread function in multivariate problems[J].The Annals of Statistics,2007,35(4):1512-1534.
[3]BOYCE C,ROSS A,MONACO M,et al.Multispectral Iris Analysis:A Preliminary Study[C]//Int′l Conf on Computer Vision and Pattern Recognition Workshop,2006:51-59.
[4]ROWE R K,NIXON K A,CORCORAN S P.Multispectral Fingerprint Biometrics[C]//IEEE Workshop on Systems,Man and Cybernetics Information Assurance,2005:14-20.
[5] CHANG H,KOSCHAN A,ABIDI B,et al.Physics-based Fusion of Multispectral Data for Improved Face Recognition[C]//Int′l Conf on Patt Recog,2006:1083-1086.
[6] HAO Y,SUN Z,TAN T,et al.Multi-spectral Palm Image Fusion for Accurate Contact-free Palmprint Recognition[C]//Int′l Conf of Image Processing,2008:281-284.
[7]杨金锋,刘源山.多光谱手指静脉成像与采集系统设计[J].中国民航大学学报,2012,30(2):24-29.
[8]李 慧,戴汝为.在体生物光学成像技术的研究进展[J].自动化学报,2008,34(12):1449-1457.
[9] 杨金锋,张海金.手指静脉图像感兴趣区域提取方法研究[J].山东大学学报,2012,42(3):6-12.
[10]YANG JINFENG,SHI YIHUA,YANG JINLI,et al.A Novel Fingervein Recognition Method with Feature Combination[C]//Int′l Conf on Image Processing,2009:2709-2712.
猜你喜欢
物理实验(2023年2期)2023-02-27 09:05:08
知识就是力量(2020年4期)2020-05-20 15:08:31
汽车维护与修理(2019年3期)2019-08-08 02:29:10
火力与指挥控制(2019年4期)2019-06-14 09:26:10
摄影之友(影像视觉)(2019年3期)2019-03-30 01:36:56
汽车维护与修理(2018年5期)2018-09-29 02:41:46
汽车维护与修理(2018年23期)2018-07-03 07:10:10
汽车维护与修理(2017年5期)2017-11-17 01:54:49
小天使·六年级语数英综合(2017年5期)2017-05-27 20:14:50
现代工业经济和信息化(2016年19期)2016-05-17 05:38:10