
改进的高斯背景建模在车辆检测中的应用
2013-07-24 05:08熊金艳
电子测试 2013年1期
李 鸿 熊金艳
(长沙理工大学电气与信息工程学院 长沙 410114)
0 引 言
运动检测是智能交通的关键问题,主要的车辆检测方法有背景差分法、路面标记法、基于边缘信息的车辆检测算法、帧差法。背景差分法的缺点是在实际情况下,环境光线的变化和阴影的变化具有随时性,使得理想背景很难一次得到。路面标记法的缺点是需要在路面上画上标记,而道路上的标记并不允许随意添加的,所以在系统的安装上有很大的局限性。基于边缘信息的车辆检测算法的缺点是需要提取阶跃状或屋顶状的边缘,阶跃状边缘两边像素的灰度值显得不同,屋顶状边缘处于灰度值由小到大再到小的变化转折点,而实际图像比较复杂,并且存在噪声,这些给边缘检测带来很多困难。帧差法可以通过连续帧图像之间变化确定图像序列有无运动,考虑到本文检测的是实时情况下运动车辆,因此采用此方法与高斯背景建模相结合来获取背景图像,对于场景内的每一个像素点进行判断。
本文主要针对实时情况下运动车辆,由于受到天气、道路环境等各方面的影响,要实现对运动车辆的精确检测,其算法要满足以下要求:
(1)能适应环境中光线的变化,如太阳光光照的变化和道路两旁路灯开关的变化
(2)能排除场景中一些背景像素的轻微扰动,如树叶的摆动、摄像头的轻微颤抖等。
(3)能适应场景中物体的变化,如车辆的移入移出。
1 初始背景帧的获取
1.1 基于统计直方图法和多帧图像平均值法的背景提取算法
背景图像是固定摄像机情况下非常重要的信息数据,所以在车辆检测中需要对背景图像进行提取。目前常用的背景提取的方法有:统计直方图法和多帧图像平均值法。
(1)统计直方图法
统计直方图法是考虑到路面上同一点被相同亮度的车辆长时间覆盖的可能性很小,所形成的亮度不一样的可能性较大,通过统计一段时间内各个像素点上不同亮度出现的次数,其中出现次数最多的即直方图中最大值就是路面本身的亮度值,该算法的缺点是计算量较大,且随着统计帧数的增加,得到的背景效果并不显著。
(2)多帧图像平均法
多帧图像平均值法是利用车辆运行一段时间的序列图像进行平均而得到道路背景图像,该表达式为:

式中:Background(x,y)表示背景图像,imagei(x,y)表示第i 帧序列图像,N 表示平均帧数。该算法的特点是模型简单,计算方便。
1.2 基于高斯建模的背景提取算法
由于本文所研究的场景环境具有背景随车辆移动而改变、摄像头固定、光照等引起的背景变化比较明显的特点,使用高斯背景建模的方法来获取初始背景帧,即假设像素值服从某种分布模型对每一个像素利用高斯模板建模,并认为其服从均值μ 和标准方差δ 的独立高斯分布。通过一段时间的训练获得其参数并不断更新,据此更新背景图像来获得初始背景帧。
在高斯模型中对于一个背景图像,其特定像素亮度的分布满足高斯分布,即背景图像IB(x,y)点的亮度满足:

其中参数μ 和δ 分别为背景模型的每个像素的平均值和方差。
建立背景模型算法的步骤:
(1)初始化背景模型
用第一帧的该像素点的灰度值作为均值μ,将标准方差设为0.
(2)背景模型的更新

用如下公式进行判断:

T 为阈值,当F 小于T 时,则该点被判定为运动前景点,否则认为该点与高斯分布相匹配,为场景背景像素点。
(3)像素点参数的更新
随着时间的变化,背景图像也会发生缓慢的变化,这时要不断更新每个像素点的参数。更新的算法可以表示为:
式中:α 是更新系数,0 <α <1。
图1 为采用MATLAB 编程的方法得到的背景图像。
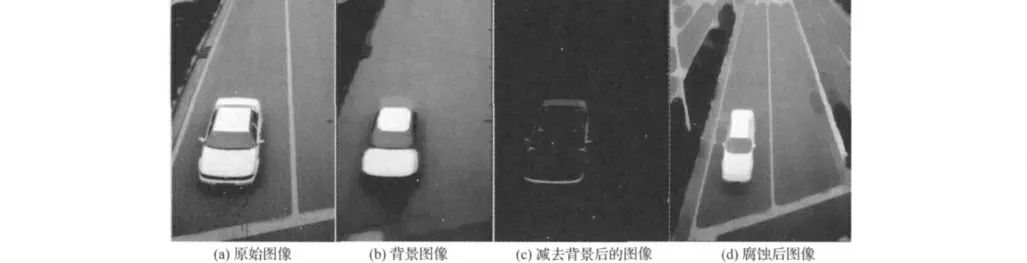
图1 背景图像的获取
2 车辆检测中所采用的图像去噪技术
通过实验可以发现,仅仅通过上述算法还不能得到非常理想的结果,必须在此基础上对数字图像进行必要的合适的平滑去噪。此过程主要是要选择合适的滤波器以及在数学形态学处理中选择合适的结构元素。
2.1 滤波器的选择
图像常会受到噪声的污染,常见的噪声有椒盐噪声、脉冲噪声、高斯噪声等。椒盐噪声含有随机出现的黑白强度值;脉冲噪声只含有随机的白强度值(正脉冲噪声)或黑强度值(负脉冲噪声);与前两者不同,高斯噪声含有强度服从高斯或正太分布的噪声。
线性滤波器去除高斯噪声的效果很好,且在大多数情况下,对其他类型的噪声也有很好的效果。线性滤波器使用连续窗函数内像素加权和来实现滤波。高斯滤波器是一类根据高斯函数的形状来选择权值的线性平滑滤波器,其用途是信号的平滑处理。数字图像在后期应用中,噪声是最大的问题,使用高斯滤波器可以得到信噪比较高的图像。由于误差是会累计传递的,因此需要先对图像做高斯平滑滤波、剔除噪声。
其编程运算实际上就是一个模板运算,使用图像的N连通区域,是一种领域运算,即输出图像中任何像素的值都是通过采用一定的算法,根据输入图像中使用像素周围一定领域内像素的值得来的。
经过高斯滤波器处理,结果如图2 所示。

图2 高斯滤波后图像
2.2 结构元素的选择
在使用形态学处理时,结构元素的选择是其中的关键,不同的结构元素对于同一幅图像会得到截然不同的效果。因此,需要根据所需要处理的图像特点来选择相应的结构元素。
形态学运算的目的在于提取图像的相关结构,结构元素的形态和尺寸决定了形态学处理的效果。任何形状都可以作为结构元素,但在实际应用中,只有一定数量的结构元素可用,通常结构元素的形状和尺寸必须适合待处理目标图像的几何性质,首先,形态学变换通常是利用对称结构元素进行运算的。当结构元素非对称时,运算的结果一般会产生偏移。例如线段结构元素,若它的原点在中点则为对称结构,若原点在端头则为非对称结构。其次,需要选择合适的结构元素形状。结构元素可以为圆盘形、长方形、多边形、线段形等。圆盘形结构元素是各向同性的,因此可以得到与方向无关的运算结果,长方形、多边形可以看作是圆盘形的变异。线段形结构元素可以用来去除或提取较长的图像结构。不同形状的结构元素运算结果会有差异,应针对待处理图像的几何形状进行选择。当确定了结构元素的形状后,结构元素的尺寸是至关重要的。当结构元素尺寸太小时,闭运算不能实现裂口较大的断裂边缘连接,作开运算时不能实现较大凸起与粘连的去除;当结构元素尺寸太大时,闭运算时目标之间会互相干扰,造成过度粘连,开运算时会造成假断裂。
利用数字形态学对所得检测结果进行去噪处理,滤波方式与结构元素不同,所得到的效果也不同。因此在试验中要通过分析与计算来确定最终的选择方式。
3 结 论
本文提出了基于实时环境背景下运动车辆检测的算法,根据视频监控的实际场景条件,选择帧差法对高斯背景建模进行改进,来检测车辆的运动情况,并采用高斯滤波器和形态学运算对含有噪声的原始背景图像进行处理,得到平滑的背景图像。将采用高斯背景建模法所得的实验效果与常用的统计直方图法和多帧平均法进行了对比,证明了其优越性和有效性。
[1]刘亚,艾海舟,徐光佑.一种基于背景模型的运动目标检测与跟踪算法[J].信息与控制,2002,31(4):315-319.
[2]Z.Sun,R.Miller,G.Bebis,et al.real-time precrash vehicle detection system[C].Proceedings of the Sixth IEEE Workshop on Applications of Computer Vision,2002:101-106.
[3]杨帆.数字图像处理与分析[M].北京:北京航空航天大学出版社,2007.
[4]罗小兰.视频跟踪中的背景建模[D].长沙:国防科技大学,2007.
[5]贾云得.计算机视觉[M].北京:科学出版社,2000.
[6]杨超,刘建伟,曹泉,等.基于高斯背景模型的视频车辆跟踪方法[J].微计算机信息,2009,25(5-3):271-272.
[7]周兵.运动目标检测及其在视频监控中的应用[D].北京:北京航空航天大学,2003.
[8]张阳,陈小惠.基于K-粒子滤波和边缘检测的图像目标跟踪研究[J].光学与光电技术,2007,5(5):85-90.
猜你喜欢
中学生数理化(高中版.高考数学)(2022年1期)2022-04-26
汽车工程师(2021年12期)2022-01-17
当代陕西(2020年14期)2021-01-08
数学小灵通(1-2年级)(2020年6期)2020-06-24
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
中学生数理化·八年级数学人教版(2017年2期)2017-03-25
贵州师范学院学报(2016年4期)2016-12-01
电影故事(2015年16期)2015-07-14
