
重型车辆侧翻预警算法研究
2013-07-20 02:34:52和好孙涛王岩松
计算机工程与应用 2013年24期
和好,孙涛,王岩松
1.上海理工大学机械工程学院,汽车工程研究所,上海 200093
2.上海工程技术大学汽车工程学院,上海 201620
重型车辆侧翻预警算法研究
和好1,孙涛1,王岩松2
1.上海理工大学机械工程学院,汽车工程研究所,上海 200093
2.上海工程技术大学汽车工程学院,上海 201620
1 引言
重型车辆具有质心位置高、整车质量和体积大、前后轮距相对于整车高度过窄等特点,因此侧翻稳定阈值较小,容易发生侧翻事故。一般情况下,在发生侧翻事故时,驾驶员很难察觉到事故的发生。据美国高速公路交通安全管理局(NHTSA)统计,在非碰撞交通事故中,有90%是由汽车侧翻造成的,而其导致的死亡率也达到了75%,在这些侧翻事故中,重型车辆占到了将近70%左右[1]。重型车辆的侧翻已经成为影响交通安全的重要问题。因此,重型车辆的行驶安全性,尤其是行驶中的侧翻稳定性问题一直以来是国内外学者的研究重点。
车辆侧翻大体上可分为两大类,一类是绊倒型侧翻,另一类则是由车辆曲线运动引起的非绊倒型侧翻[2]。值得注意的是,绝大多数的非绊倒型侧翻发生在重型车辆上,一般主要发生在高速避障的工况,由于驾驶员精力不集中或躲避紧急状况(如行人、障碍物)时,过度转动方向盘,引起车辆的失控,从而发生侧翻。本文重点研究的重型车辆侧翻问题主要集中在非绊倒型侧翻。
近年来,侧翻预警系统在重型车辆稳定性控制中的应用大大提高了车辆的侧倾稳定性,进而有效避免了重型车辆侧翻事故的发生。1998年,美国密歇根大学交通研究所开发了侧翻稳定性警告系统(Rollover Stability Advisorsystem,RSA),通过实时测量车辆状态来确定侧翻加速度门限值[3]。2001年,Chen等[4]提出了一种基于预测模型的侧翻时间(Time-To-Rollover,TTR)预警算法,该算法具有超实时性,可以提前让驾驶员感知侧翻危险,同时便于与主动防侧翻系统进行连接。2007—2009年,吉林大学对重型车辆侧倾稳定性控制进行了研究,在ADAMS、Matlab等软件中建立了重型车辆侧倾动力学模型,探索车辆结构参数、运动参数对重型车辆侧倾动力学的影响[5-6]。但以上这些研究并没有考虑一些参数在车辆行驶过程中难以直接测取的问题,从而导致作为侧翻危险判据的动态门限值不能准确获得。
本文针对重型车辆非绊倒型侧翻的特点,首先建立可实时计算的重型车辆简化动力学模型,然后利用该简化动力学模型,结合经典Kalman滤波状态估计技术实时准确估计重型车辆在行驶过程中车身侧倾角的大小,并由此计算出车辆侧翻预警控制的动态门限值。在此基础上,设计基于侧翻时间(TTR)的重型车辆侧翻预警算法,最后利用Matlab/Simulink与Trucksim软件联合仿真对设计的侧翻预警算法进行验证。
2 重型车辆侧翻预测模型
本文采用三自由度车辆线性高斯模型来设计重型车辆侧翻预警系统。如图1所示,该线性模型的三个自由度分别为侧向运动,横摆运动和侧倾运动。图中m为整车质量;h为质心到侧倾中心的距离;δ为前轮转角;ϕ为侧倾角;ψ˙为横摆角速度;α12、α34分别为前、后轮侧偏角;β为质心侧偏角;lv、lh分别为质心至前、后轴距离;Vx、Vy分别为纵向、侧向速度;F12、F34分别为前、后轮总侧向力;ay为质心处侧向加速度。

图1 重型车辆模型示意图
为简化模型,作如下假设:
(1)忽略转向系影响,模型以前轮转向角输入。
(2)不考虑车辆的俯仰运动。
(3)忽略空气阻力的作用。
(4)假设车辆在水平路面行驶,忽略车辆的垂向运动。
(5)假设车辆质心处的纵向速度为一常数。
(6)忽略车辆左、右轮胎由于载荷的变化而引起的轮胎特性的变化以及轮胎回正力矩的作用。
(7)忽略轮胎和悬架的非线性影响,简化悬架刚度和阻尼为等效侧倾刚度和等效侧倾阻尼。
(8)非簧载质量相对于簧载质量而言较小。
(9)簧载质量绕X、Z轴的惯性积很小,不予考虑。
由此重型车辆模型,据达朗贝尔原理,可列出下列三个平衡方程:
(1)绕Z轴的力矩平衡方程为:

式中,Ixx是整车质量绕车身质心的纵轴的转动惯量;Ix是整车质量绕侧倾轴的转动惯量;Cv、Ch分别为前、后轮胎的总侧偏刚度;k为悬架等效侧倾刚度;c为悬架等效侧倾阻尼系数。
3 基于侧倾角估计的TTR侧翻预警算法
本章研究基于侧倾角估计的TTR侧翻预警算法。具体的算法如下:首先选择车辆动态横向载荷转移率(Lateralload Transfer Rate,LTR)作为侧翻危险判据的预警门限值。这样的门限值选择使得预警算法更加具有普适性;其次,为了更加精确地获得动态预警门限值,在侧翻预警算法中使用基于卡尔曼滤波技术的参数估计器。
3.1 侧翻预警门限值计算
传统意义上,车辆横向载荷转移率(LTR)可以定义为车辆两侧车轮上的垂直载荷之差与垂直载荷之和的比值,即[7]

当左右轮胎载荷相等时,LTR的值为0;当发生侧翻危险时,一侧车轮离开地面,此时LTR的绝对值为1,即对于不同的车型和不同的行驶条件,侧翻预警门限值可确定为一定值,为保证车辆的行驶安全,本文将动态横向载荷转移率预警门限值设为0.9。
由于车辆在行驶过程中左右车轮垂直载荷不断变化且不易直接测量,所以难以根据定义式直接计算出动态LTR的值。本文选取一套实时计算横向载荷转移率LTR的算法,具体计算公式为[8]:

式中,hRC为车辆侧倾中心高度,dt为车辆轮距。所以,要想获得精确的动态横向载荷转移率,必须首先获得车辆侧向加速度和实际侧倾角这两个状态量。车辆侧向加速度可以通过传感器直接测出,而车辆的实际侧倾角却难以通过车载传感器直接获得,需通过Kalman滤波估计技术对其进行实时的估计,下面具体介绍通过Kalman滤波技术进行状态估计的过程。
3.2 车身侧倾角的Kalman滤波估计算法
Kalman滤波器用反馈控制的方法估计过程状态:滤波器估计过程某一时刻的状态,然后以(含噪声的)测量变量的方式获得反馈。因此Kalman滤波器可分为两部分:时间更新方程和测量更新方程。时间更新方程负责实时向前推算当前状态变量和误差协方差估计的值,以便为下一个时间状态构造先验估计。
Kalman滤波估计算法工作原理如图2所示。
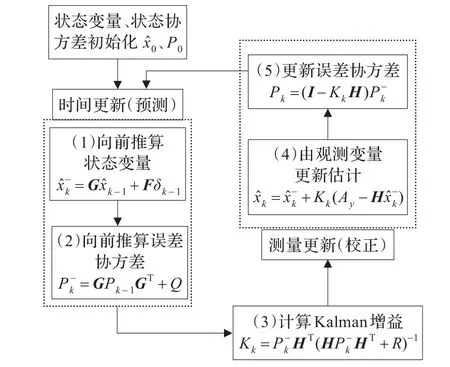
图2 Kalman滤波估计算法原理图
假定车辆的纵向速度Vx在该时刻不变,车轮的前轮转角δ作为控制输入,侧向加速度传感器实际测量的侧向加速度ay作为车辆系统的观测变量。在Kalman滤波估计器中的量测方程为:

具体车辆状态Kalman滤波估计器设计步骤为:
(1)车辆侧翻模型的初始状态变量设定为:

(2)Kalman滤波估计器系数设定为:
测量噪声协方差R=1;
过程激励噪声协方差Q=1 000×I4;
(3)Kalman滤波估计器时间更新部分为:
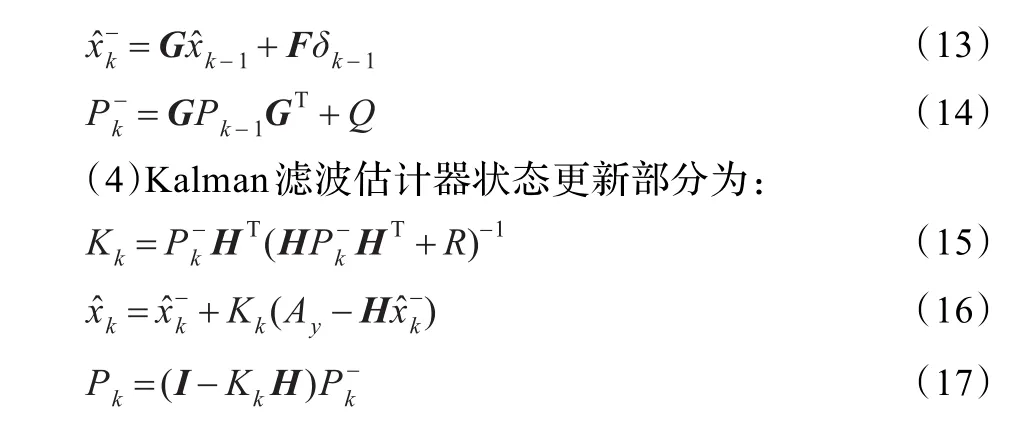
式中,Pk为误差协方差,Kk为Kalman增益系数,xˆk为状态估计量,G、F、H、A为系数矩阵。
3.3 基于侧倾角估计的重型车侧翻预警算法
基于Kalman滤波侧倾角估计的TTR侧翻预警算法逻辑结构,如图3所示。算法是基于参考模型来预测真实车辆的状态参数,利用前文所建立的车辆侧翻模型,以车辆当前时刻的运行状态为初始值,按照车辆侧翻规律以Ts为步长计算模型的侧翻指标LTR。当该指标第一次满足侧翻条件时记下计算步数N,即可以得到车辆侧翻预警时间为N×Ts。

图3 改进TTR侧翻预警算法逻辑结构图
在侧翻预警系统中,为减小计算工作量,通常预设TTR侧翻预警门限值为X秒。若X秒内侧翻指标LTR不满足侧翻条件,即未来X秒时间内车辆不会发生侧翻,则认为车辆处于安全状态,停止本周期的计算。本文设定TTR门限值X为3 s。
预警过程为一个倒计时过程,TTR的值越小,则车辆发生侧翻的风险越大,TTR的值为0时,说明车辆正在发生侧翻。
4 侧倾预警仿真分析

图4 鱼钩转向工况仿真结果

图5 正弦转向工况仿真结果
在Matlab/Simulink环境下建立基于侧倾角估计的重型车辆侧翻预警算法,并利用Trucksim软件对侧翻算法进行仿真验证。在初始车速为50 km/h时进行鱼钩转向实验,在初始车速为70 km/h时进行正弦输入转向实验,在初始车速为80 km/h时进行阶跃转向实验,在初始车速为80 km/h时进行紧急避障实验,侧翻预警算法的仿真结果如图4至图7所示。
由图4可知,在鱼钩转向工况下,Kalman滤波器估计出的车身侧倾角与Trucksim软件中实际的车身侧倾角基本吻合,均方根误差较小。而后由TTR算法计算可知侧翻预警时间为1.592 s。
由图5可知,在正弦转向工况下,Kalman滤波器估计出的车身侧倾角与Trucksim软件中实际的车身侧倾角基本吻合,均方根误差较小。而后由TTR算法计算可知侧翻预警时间为1.253 s。
由图6可知,在阶跃转向工况下,Kalman滤波器估计出的车身侧倾角与Trucksim软件中实际的车身侧倾角基本吻合,均方根误差较小。而后由TTR算法计算可知侧翻预警时间为2.979 s。

图6 阶跃转向工况仿真结果

图7 紧急避障工况仿真结果
由图7可知,在紧急避障工况下,Kalman滤波器估计出的车身侧倾角与Trucksim软件中实际的车身侧倾角基本吻合,均方根误差较小。而后由TTR算法计算可知侧翻预警时间为2.634 s。
5 结论
(1)针对目前重型车辆侧翻预警算法动态门限值(即横向载荷转移率)较难获得的问题,提出了Kalman滤波估计算法,并建立了车身侧倾角估计线性高斯模型,结合模型并利用此算法可以比较精确地估计出车辆行驶过程中的车身侧倾角,从而可实时得到横向载荷转移率的动态值大小。
(2)利用Matlab/Simulink与Trucksim软件联合仿真,来对基于侧倾角估计的TTR侧翻预警算法的效果进行验证。仿真结果表明,此算法可以精确进行重型车辆的侧翻预警,提醒驾驶员及时修正具有危险性的操作,从而避免侧翻事故的发生。
[1]Facts T S.A compilation of motor vehicle crash data from the fatality analysis reporting system and the general estimates system[R].National Highway Traffic Safety Administration,2003.
[2]余志生.汽车理论[M].5版.北京:机械工业出版社,2009.
[3]Ervin R D,Winkler C B,Fancher P S,et al.Cooperative agreement to foster the development of a heavy vehicle intelligent dynamic stability enhancement system[R].University of Michigan Transportation Research Institute,1992.
[4]Chen B C.Warning and control for vehicle rollover prevention[R].University of Michigan,2001.
[5]于尧.基于差动制动的半挂汽车列车稳定性仿真与控制研究[D].长春:吉林大学,2007.
[6]Zhu Tianjun.Yaw/Roll stability modeling analyses and control of heavy tractor-semitrailer,SAE Paper No.2007-01-3574[R]. 2007.
[7]Preston-Thomas J,Woodrooffe J H F.A feasibility study of a rollover warning device for heavy trucks,Transport Canada Publication No.TP10610E[R].1990.
[8]Miege A J P,Cebon D.Active roll control of an experimental articulated vehicle[J].Proceedings of the Institution of Mechanical Engineers,Part D:Journal of Automobile Engineering,2005,219(6):791-806.
HE Hao1,SUN Tao1,WANG Yansong2
1.Institute of Automotive Engineering,School of Mechanical Engineering,University of Shanghai for Science and Technology, Shanghai 200093,China
2.Automotive Engineering College,Shanghai University of Engineering Science,Shanghai 201620,China
Focusing on the issue of realizing the traveling heavy vehicle non-tripped rollover warning,a 3-DOF rollover model and a Time-To-Rollover(TTR)-based rollover algorithm are established.On this basis,Kalman filter technique is introduced to the Time-To-Rollover(TTR)algorithm,to present a TTR rollover warning algorithm based on roll angle estimation,thereby realizing the precision prediction of dynamic rollover character.This paper validates the algorithm by using Matlab/Simulink and Trucksim co-simulation platform.The results show that the rollover warning algorithm based on roll angle estimation can successfully work and provide a new design thinking to the issue of heavy vehicle non-tripped rollover warning.
heavy vehicle;Kalman filter;roll angle estimation;time-to-rollover;rollover warning algorithm
针对重型车辆在行驶过程中非绊倒型侧翻预警实现问题,建立了三自由度车辆侧翻模型并设计了以侧翻时间(TTR)为预警标准的算法。考虑到预警算法中动态门限值中某些参数难于直接测取的问题,将Kalman滤波技术融合于其中,提出了基于车身侧倾角估计的TTR侧翻预警算法,实现车辆动态侧翻特性的精确预测。而后利用Matlab/Simulink与Trucksim软件联合仿真对侧翻预警算法进行验证。结果表明,基于车身侧倾角估计的重型车辆侧翻预警算法能够顺利运行,为非绊倒型侧翻预警问题提供了一种新的设计思路。
重型车辆;卡尔曼滤波;车身侧倾角估计;侧翻时间;侧翻预警算法
A
TP391.9
10.3778/j.issn.1002-8331.1308-0013
HE Hao,SUN Tao,WANG Yansong.Rollover warning algorithm for heavy vehicles.Computer Engineering and Applications,2013,49(24):256-261.
国家自然科学基金(No.51175320);上海市科研创新项目(No.12ZZ145)。
和好(1988—),男,在读硕士,研究领域为车辆系统动力学及其控制;孙涛(1974—),男,博士,副教授,研究领域为车辆系统动力学及其控制;王岩松(1971—),男,博士,教授,研究领域为振动和噪声测控。E-mail:red_devil_hh@163.com
2013-08-02
2013-09-18
1002-8331(2013)24-0256-06
猜你喜欢
世界汽车(2022年11期)2023-01-17 09:30:50
科学大众(2021年19期)2021-10-14 08:33:10
中国临床医学影像杂志(2021年6期)2021-08-14 02:21:46
北京汽车(2021年3期)2021-07-17 08:25:42
电镀与环保(2018年4期)2018-08-20 03:08:10
环境保护与循环经济(2017年8期)2017-03-22 01:29:08
工程建设与设计(2016年1期)2016-02-27 10:50:23
汽车维修与保养(2015年7期)2015-04-17 02:12:44
汽车维护与修理(2015年6期)2015-02-28 12:17:31
汽车维护与修理(2015年2期)2015-02-28 12:15:51
