基于GO 法的汽车EPS 系统可靠性分析
2013-07-19 09:26游专,何仁
实验室研究与探索 2013年1期
游 专,何 仁
(1.淮安信息职业技术学院 汽车工程系,江苏 淮安223003;2.江苏大学 汽车与交通工程学院,江苏 镇江212013)
0 引 言
汽车电控电动助力转向(Electric Power Steering,EPS)和以往助力转向系统相比具有效率高、能耗少,路感可以通过软件调节,对环境几乎没有污染,可以独立于发动机工作,装配性好等优点,自从1988 年在日本商业化以来,相继得到了国外各大汽车企业和汽车零部件公司的重视,不仅用于微型汽车和小型汽车上,还广泛应用于轻型货车及普通型轿车上。汽车转向系统可靠性直接影响到汽车的操纵稳定性,它对于确保车辆的安全行驶、减少交通事故以及保护驾驶员的人身安全起着重要的作用。目前,汽车EPS 可靠性评估方法大致可分为可靠性试验法[1]和FMEA、FTA 法[2]2类。汽车可靠性试验是完成汽车产品可靠性检验的有效途径,但是它往往是具有破坏性或严重损耗的试验,因此在实际使用中难以避免试验周期长、费用高、费时等问题;FTA 分析是一种图形演绎分析法,其缺点是大型的故障树不易理解,且往往非单一解,包含复杂的逻辑关系[3]。FMEA 分析的特点是通过系统的全面分析,找出危害度较大的零部件,但一般不能考虑失效的综合效应,随着系统的扩大,状态组合变得十分复杂庞大,相应的计算处理速度也很慢[4-5]。
而GO 法(Goal Oriented Methodology)由美国Kaman 科学公司在20 世纪60 年代提出,是一种以成功为导向的系统概率分析技术,对于有多状态、有时序系统,尤其是有实际物流如气流、液流、电流的生产过程的安全性分析更为合适,目前,这种分析方法在西方国家已经基本成熟并得到推广应用,而在我国起步较晚。本文将首次应用GO 法对汽车EPS 系统,一个非常复杂的机电一体化系统进行可靠性分析,阐述汽车EPS 系统GO 法的具体分析步骤,采用信号流和操作符建立GO 图模型,并进行精确的定量分析和定性分析。
1 GO 法分析原理
GO 法的发展是基于决策树理论,它的基本思想是把系统原理图、流程图或工程图直接按一定规则翻译成GO 图。主要步骤是建立GO 图和进行GO 运算[6]。而GO 图和GO 运算的2 大要素是操作符和信号流组成,GO 操作符表示具体的部件(如转向轴、减速机构等)或逻辑关系;信号流用来连接GO 操作符,表示系统具体的能量流向或逻辑上的进程。
1.1 GO 法操作符
系统中零件、部件或子系统可统称为单元,GO 操作符用来代表系统中功能单元和功能单元输入、输出信号之间的逻辑关系。操作符的属性有类型、数据和运算规则,类型是操作符的主要属性,操作符类型反映了操作符所代表的单元功能和特征。GO 法定义了17种标准操作符[7],涉及到的操作符如图1 所示,它们也是汽车EPS 系统可靠性分析中常用的典型操作符。其中:S 表示系统输入;R 表示系统输出。
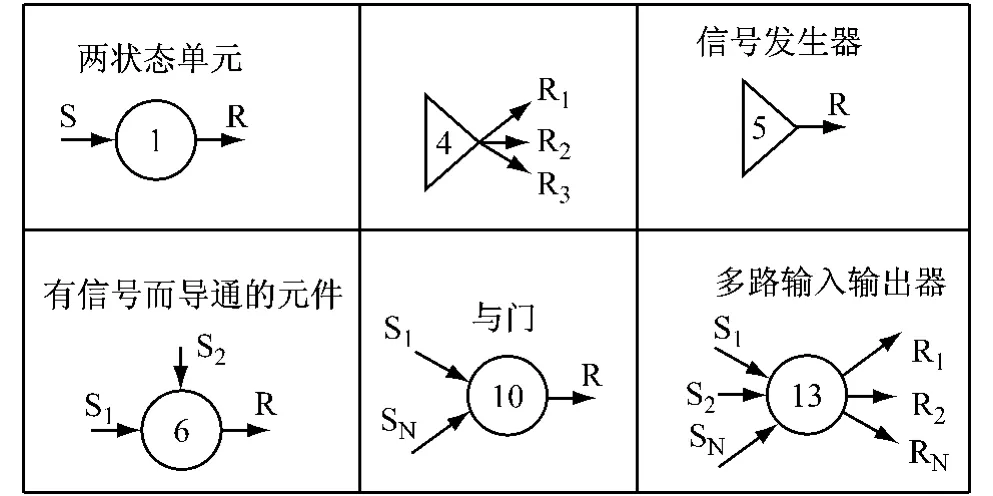
图1 GO 法操作符符号示意图
(1)类型1 操作符。2 状态单元(可模拟转向轴、各类传感器等仅用正常和失效2 个状态就可描述的一些零件)。
(2)类型4 操作符。多信号发生器(没有输入信号,只有输出信号,它产生2 个或多个不独立的信号,作为系统的输入)。
(3)类型5 操作符。信号发生器(可模拟转向盘、点火开关信号等系统的输入信号)。
(4)类型6 操作符。有信号而导通的元件(可模拟点火开关等除了要有主输入信号,还要有此输入信号(动作信号)使元件动作接通,才能允许主输入信号通过的元件)。
(5)类型10 操作符。与门(表示输入输出信号间的逻辑关系,输出信号状态值是输入信号中的最大状态值)。
(6)类型13 操作符。多路输入输出器(可模拟ECU 的多路输入输出)。
1.2 GO 法信号流
信号流表示系统功能单元的输入和输出信号及功能单元之间的关联,信号流连接GO 图操作符生成GO图。信号流的属性是状态值和状态概率,在简单的2状态系统中,状态值1 代表成功,状态值2 代表故障,处于成功和故障状态的概率是P(1)和P(2),有P(1)+ P(2)= 1。GO 法可用于多状态系统,用0,1,…,N 整数状态值代表个N + 1 状态。状态值0 代表提前状态,如过早发出的信号或信号来到前发生的动作等,状态值1,…,N-1 表示多种成功状态,最大状态值N 表示故障状态[7]。相应状态值的概率为P(0),P(1),…,P(N)且满足式(1):

1.3 GO 法分析流程
GO 法一般的分析过程为:系统分析、根据系统结构建立GO 图、输入数据、进行GO 运算。首先定义所分析的系统,规定系统的范围,确定系统所包含的单元以及单元组成系统的结构,分析其功能,确定系统的成功准则,确定系统的输入和输出边界[8]。GO 图建立并输入操作符的可靠性数据后,进行GO 运算。从输入操作符的输出信号开始,按操作符规定的算法,逐步运算至系统的输出信号,得到系统所有信号流的可靠性特征量[9]。通过GO 运算完成系统可靠性分析,系统输出信号的可靠性特征量代表了包括输入单元所代表的前一级系统的整个系统稳定运行时的平均可靠性特性,以此可对系统做出评价,提出改进设计,提高系统运行的可靠性[10-11]。
2 EPS 系统工作原理及GO 法建模
2.1 工作原理
由图2 可知,EPS 系统主要包括机械式转向机构、转向助力装置和电子控制系统3 大部分组成。其工作原理是:驾驶员在操纵方向盘进行转向时,转矩传感器检测到转向盘的转向以及转矩的大小,将电压信号输送到电子控制单元,电子控制单元根据转矩传感器检测到的转矩电压信号、转动方向和车速信号等,向电动机控制器发出指令,使电动机输出相应大小和方向的转向助力转矩,从而产生辅助动力。汽车不转向时,电子控制单元不向电动机控制器发出指令,电动机不工作[12-14],EPS 系统控制框图如图3 所示。

图2 EPS 系统组成图
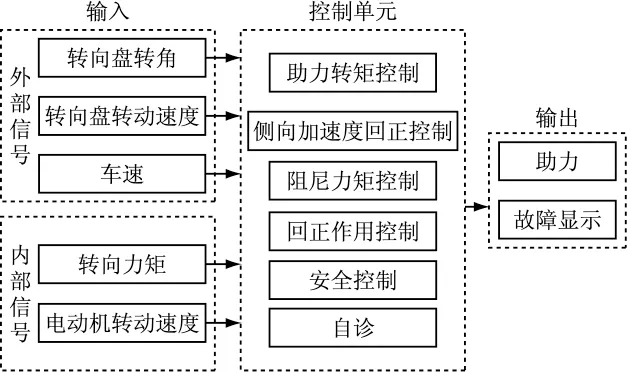
图3 EPS 系统控制框图
2.2 GO 图模型建立
GO 法中系统分析和运算都以成功为准则,如果成功准则不同,那么系统分析和计算结果也不同,汽车EPS 系统,其成功准则就是转向时各元件工作正常,保证转向成功。基于图2、3 建立EPS 系统的GO 图模型。GO 图中操作符内前一数字表示操作符的类型,后一数字表示操作符的编号,信号流上的数字表示信号流编号。

图4 EPS 系统GO 图
在图4 中,点火开关启动信号和车速传感器信号属于EPS 系统范围之外,连同蓄电池,转向轴均作为EPS 系统的输入,都用单信号发生器代表;点火开关要有启动信号作为条件信号来启动,本身有正常和故障2 个状态,用有信号而导通的元件代表;转向轴、转角传感器、转矩传感器、电流信号、电动机、减速机构、转向器和转向横拉杆分别由其他信号介入而启动,本身有正常和故障2 个状态,因此可用2 状态单元代表;电磁离合器的信号来自于电动机和ECU 发出的电磁离合器控制信号,因此用与门代表其间的逻辑关系;ECU接受车速传感器信号、转矩传感器检测到的转距电压信号、转向盘转向传感器信号,同时输出电流信号给电动机和电磁离合器控制信号给电磁离合器,输出相应大小和方向的转向助力转矩,从而产生辅助动力。
给定各单元的成功概率,就可计算出整个系统的成功概率。输入EPS 系统GO 图各操作符的可靠性数据,各操作符的类型、代表的单元名称以及失效概率按编号列于表1。
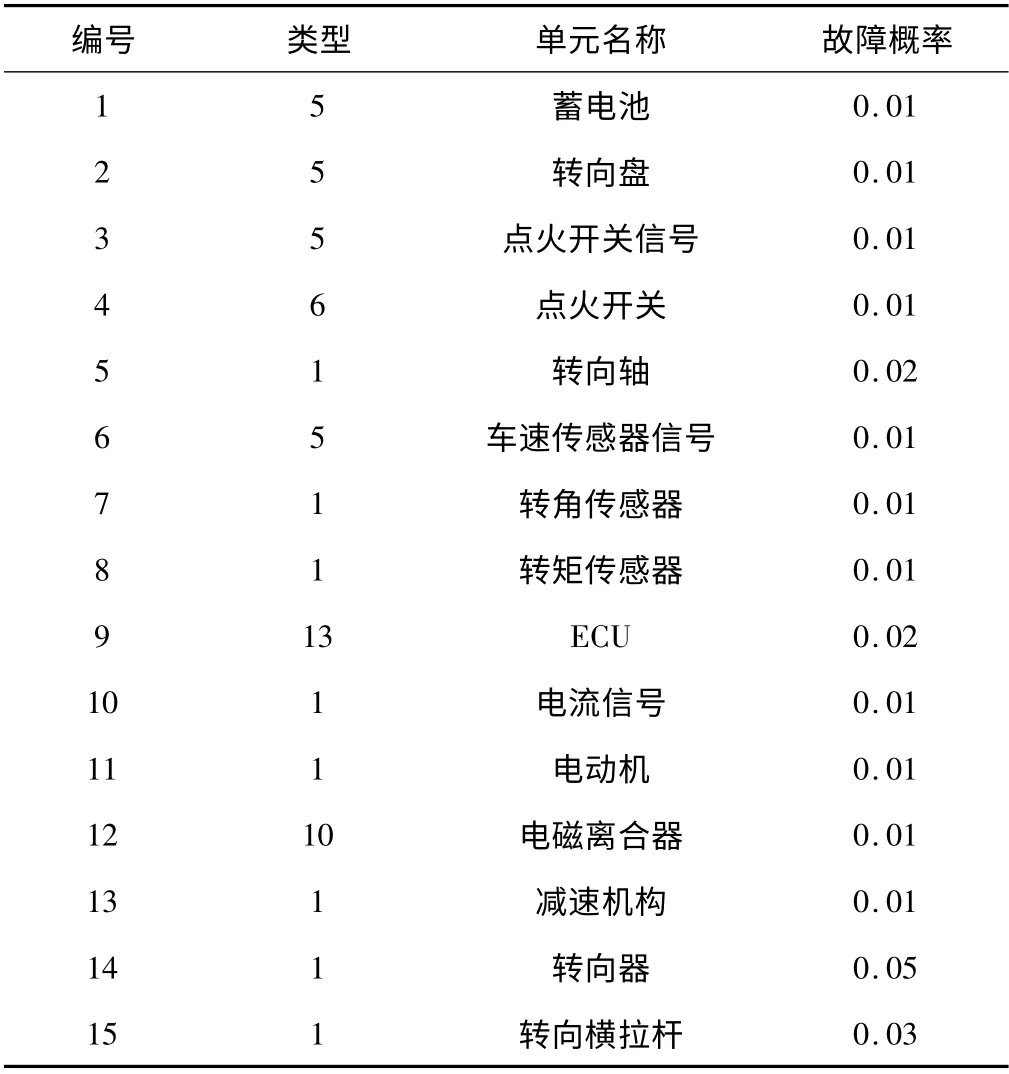
表1 EPS 系统中的单元及特征数据
3 EPS 系统GO 法分析
3.1 定性分析
假设系统GO 图中除了逻辑操作符以外有M 个操作符,分别代表系统的功能部件。求一阶割集时,只要假设M 个操作符中某个操作符处于故障状态,其成功概率为零,其他操作符状态概率不变,直接计算系统的成功概率,如果系统成功概率为零,则该操作符的故障状态即为系统的1 个一阶割集。M 个操作符依次计算即可求得系统所有的一阶割集。M 个操作符中在一阶割集以外取2 个操作符,用同样的方法可得到所有2 阶最小割集。依此类推,可得到系统的各阶割集。求高阶割集时,高阶组合中如果已包含某低阶的割集,则不必进行系统成功概率计算,这样求得的割集才是最小割集。
最小割集中操作符故障状态的组合代表系统功能部件故障事件的组合,这些部件故障概率的乘积代表了最小割集的发生概率。最小割集的发生概率可用于评价最小割集的重要度,进行系统的定性分析。用此方法对图4 所示GO 图模型进行定性分析,如表2 所示。
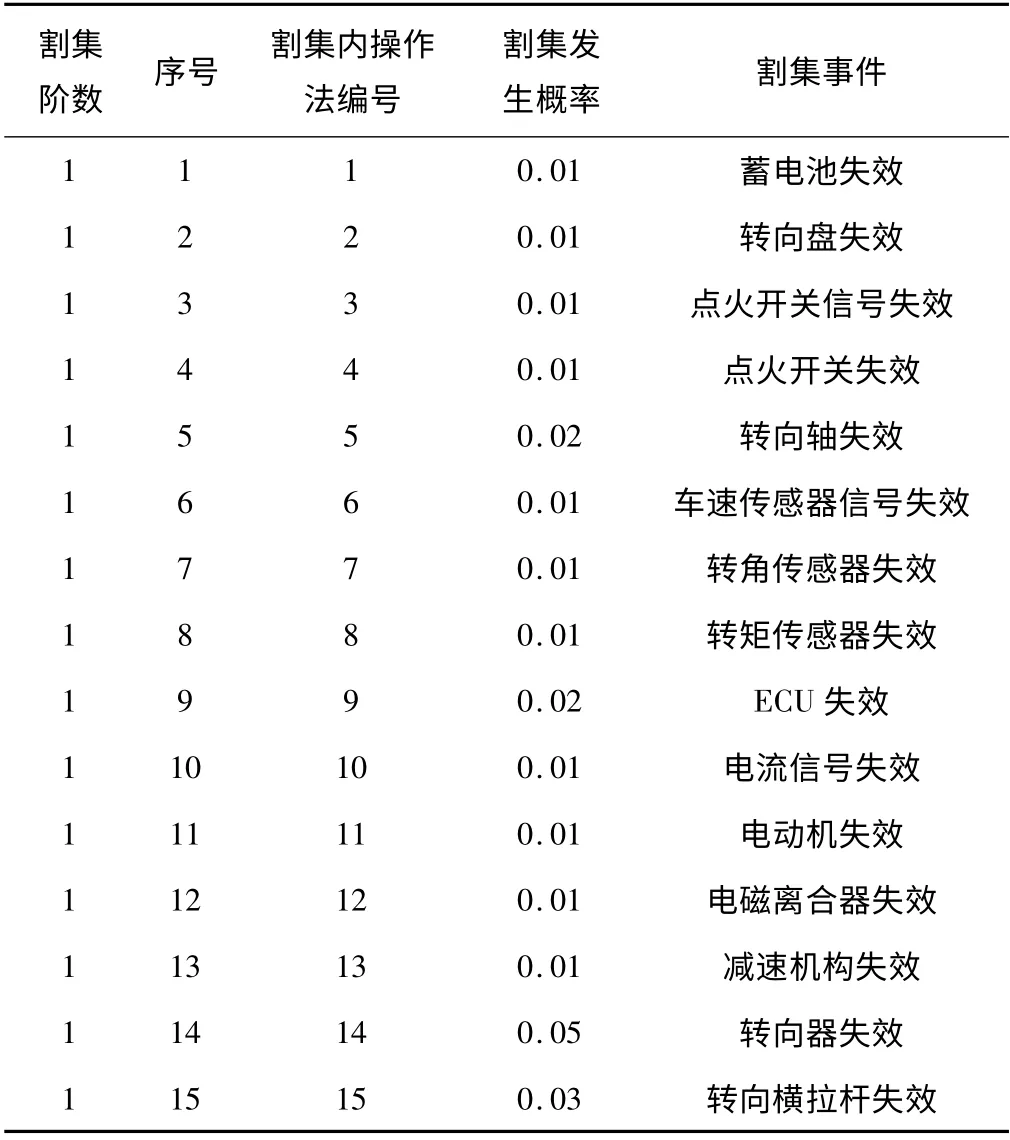
表2 EPS 系统最小割集分析结果
分析结果表明,系统无2 阶及以上割集,这是由于EPS 系统是1 个串联系统,这样系统的最小割集全为1 阶割集,15 个最小割集发生概率的总和为0.23,这是系统故障概率的近似值,即EPS 系统可靠性为0.77。系统故障概率应为所有最小割集的并集概率,由于最小割集不是完全独立的,用布尔代数计算其并集的概率是极其复杂的。通常最小割集的发生概率都很小,近似假设最小割集相互独立,用发生概率的总和作为系统故障概率的上限结果是可信的。
3.2 有共有信号系统的修正定量分析
系统GO 图中某操作符的输出信号连接到2 个或多个操作符,作为它们的输入信号,那么该输入信号定义为共有信号。该共有信号同时作为多个操作符的输入信号,这些操作符的输出信号状态概率,由这些操作符状态概率和该共有信号的状态概率按状态概率公式计算。如果某信号的状态概率表达式的所有各项都是共有信号状态概率和其他因子的乘积,那么定义为该信号完全包含此共有信号;如果有些项中没有出现此共有信号状态概率,那么定义为该信号部分包含此共有信号。包含同一共有信号流的信号流不是完全独立的,在进行定量计算时要进行修正计算[7]。
假设某个多输入操作符有M 个输入信号Sj,j= 1~M,有1 个输出信号R,该操作符的状态概率计算公式中i=0,…,N-1 表示状态值或时间点,对每个i 值计算公式是一样的,为了简化公式推导,略去i,操作符的计算公式展开后为:

式中:AR为输出信号的状态累积概率;AS1,AS2,…,ASM为M 个输入信号的状态累积概率;N ()表示多项式函数,由其变量的加、减、乘运算组成。
当输入信号只包含1 个共有信号Sa时,第j 个输入信号的状态累积概率一般可以表示为

式中,a0j、a1j与共有信号无关。如果a1j≠0,就表示第j 个输入信号与共有信号有关;当a0j= 0 时,表示完全包含共有信号;;当a0j≠0 时,表示部分包含共有信号。
考虑Sa是共有信号,将ASa的高次项用一次项替换进行修正,修正为

按照上面所述方法对图4 所示的汽车EPS 系统GO 模型进行计算,即可得到该系统的成功概率的修正值:

基于FTA 分析和FMEA 分析法对上述汽车EPS系统进行定量分析(限于篇幅,这部分内容未列出),可得系统正常作用的概率为 0. 963 2537 和0.973 826 9,所得结果与应用GO 法得出的结论十分接近。
4 结 论
由于汽车EPS 系统具有多态有序的特殊性,应用GO 法对系统进行可靠性分析,根据信号流顺序建立的GO 图清晰明了,操作方便。相对于FTA 分析方法可以大大减少工作量和降低建模差错,相对于FMEA分析方法,可以缩减方程编程量,保证较快的计算速度。而且GO 法分析不仅能够计算出整个系统的可靠性,还可以清楚地得到各环节的可靠性。因此,采用GO 法对汽车EPS 系统进行建模和计算是正确实用可行的[15]。
[1] 鹿应荣,李显生. 国产汽车的整车可靠性评价[J]. 汽车工程,2001,23(2):106-109.
[2] 刘 照.FMEA 与FTA 方法在线控转向系统可靠性分析中的应用[J].机械与电子,2009(9):40-43.
[3] 金晓志,洪荣晶. FTA 在液压故障诊断系统中的应用[J]. 机械设计与制造,2011(11):59-61.
[4] 邓 曼.FTA 和FMECA 综合法对常压炉的风险分析[J].工业安全与环保,2006,32(12):51-53.
[5] 谢春芳.FMEA 的认识及应用[J].中国高新技术企业,2011(2):40-41.
[6] 李河清,谭 青.基于GO 法的轮胎起重机液压系统可靠性分析[J].机床与液压,2008,36 (4):213-215.
[7] 沈祖培,黄祥瑞.基于GO 法原理及应用[M]. 北京:清华大学出版社,2004.
[8] 蔡国强,周莉茗.基于GO 法的城市轨道交通车门系统可靠性分析[J].西南交通大学学报,2011,46(2):264-270.
[9] 段志薇,谢光青.GO 法在引信可靠性分析中的应用[J].机械工程与自动化,2010,2(1):131-132,135.
[10] 黄 涛,蔡 琦.SIMULINK 仿真技术在压水堆净化系统可靠性GO 法分析中的应用[J].核动力 工程,2010,31(1):88 -91.
[11] 刘双杰.GO 法及在机电系统可靠性分析中的应用[J].黑龙江科技信息,2009(3):57.
[12] 姚慧杰,孙常波.P-EPS 动力学模型的建立与仿真分析[J].机械设计与制造,2010(1):220-222.
[13] 王良模,张 伟.基于联合仿真分析的微型轿车EPS 控制策略研究[J].南京理工大学学报(自然科学版),2011,35(1):91-96.
[14] 王慧君,李幼德.EPS 助力系统模糊PID 控制器的设计[J].制造业自动化,2011,33(2):34-36.
[15] 尹宗润,慕晓冬.基于GO 法的航空电子设备可靠性评估[J].计算机工程,2009,35(15):272-274.
猜你喜欢
中学生数理化·中考版(2022年6期)2022-06-05
中学生数理化·中考版(2021年6期)2021-11-22
新世纪智能(数学备考)(2021年4期)2021-08-06
新世纪智能(数学备考)(2021年4期)2021-08-06
电子制作(2019年20期)2019-12-04
上海质量(2019年8期)2019-11-16
电子制作(2018年23期)2018-12-26
电子制作(2017年2期)2017-05-17
铁道通信信号(2016年11期)2016-06-01
电测与仪表(2016年3期)2016-04-12