基于超声波传感器的智能车模型设计
2013-07-19 09:27邱增凯王天皓贾少华高印寒
实验室研究与探索 2013年1期
朱 宇,屈 路,邱增凯,王天皓,贾少华,高印寒
(吉林大学 a.仪器科学与电气工程学院;b.汽车仿真与控制国家重点实验室,吉林 长春130025)
0 引 言
随着国民经济的增长,汽车已趋于普及。然而,每天都有汽车事故发生,追尾事故极其频繁,追尾事故就占汽车事故的30% ~40%,而追尾事故造成的损失和伤亡又占总损失的60%。因此智能交通系统的研究在各国越来越被重视,智能车的控制技术也成为一项新兴技术。智能车控制系统综合了传感器技术、自动控制技术、信号处理技术、单片机技术等多个学科的知识[1-2]。智能车控制系统的设计可以大大降低追尾事故的发生,也可以为无人驾驶汽车等技术领域的研究提供宝贵的经验。
本文对智能车的避障及速度控制等进行了研究[3-5],设计了具备避障功能的智能小车,该小车搭建了基于单片机的智能车控制系统。系统采用大电流、脉冲驱动的超声波传感器组作为探测传感器,探测道路情况,采用平均分布模型以及精确的算法完成对电机的控制,利用脉宽调制技术实现直流电机的调速,实现了智能车的快速、平稳运行。
1 超声波探测模型
1.1 超声波特性
超声波是一种人耳听不见的机械波,频率在20 kHz 以上,超声波的波长短、绕射小,它可作为声波射线并定向传播,移动智能小车的超声波传感器主要用于对周围物体的探测与测距。超声测距一般采用渡越时间法,即
式中;D 为移动智能小车与被测障碍物之间的距离;C为声波在介质中的传输速率;t 为从超声发射到超声返回的时间间隔,即传播时间或“渡越时间”。声波的速度与温度T 有关。如果环境温度变化显著,则必须考虑温度补偿问题[6-7]。空气中声速与温度的关系可表示为

超声波传感器作为一种测距传感器,能够得到传感器和障碍物之间的距离信息,但由于超声波发散角较大,从而导致了辨析率较低。鉴于单个超声波传感器的信息量少且存在固有误差,因此需要使用多个超声波束来感知环境,以获得更大空间范围内的障碍物信息[8-9]。根据超声波传感器的特性,为其建立一个模型,常用的模型有中线模型、正态分布模型、平均分布模型。本系统选用应用较广泛的平均分布法模型。
1.2 空间区域的模糊划分
本系统设计采用的超声波传感器的发散角为30°,因此前方8 个传感器能探测的角度范围为-67.5° ~+67.5°,且该范围内的每个区域都被2 个超声波传感器的发散角覆盖,超声波传感器阵列位置如图1 所示[10]。
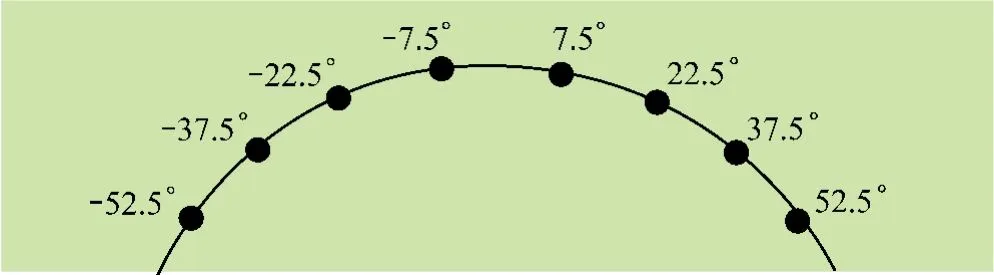
图1 超声波传感器阵列位置图
为了简化数据处理并充分利用超声波传感器的信息,将智能车辆前方探测空间划分为如图2 所示的5个区域。
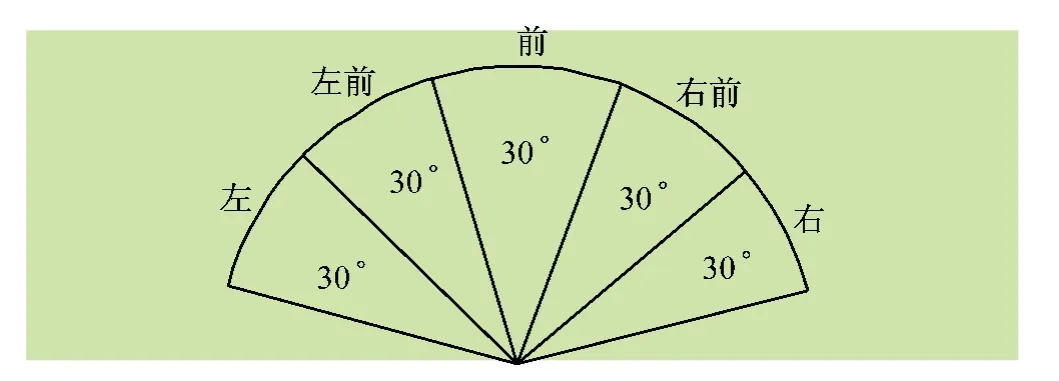
图2 空间方向的划分
由图2 可知,根据平均分布法,每个超声波传感器的探测信息在这5 个区域中存在障碍物的概率分别可以计算。由于超声波传感器阵列是左右对称的,表1仅列出1 ~4 号超声传感器的信号概率数据。
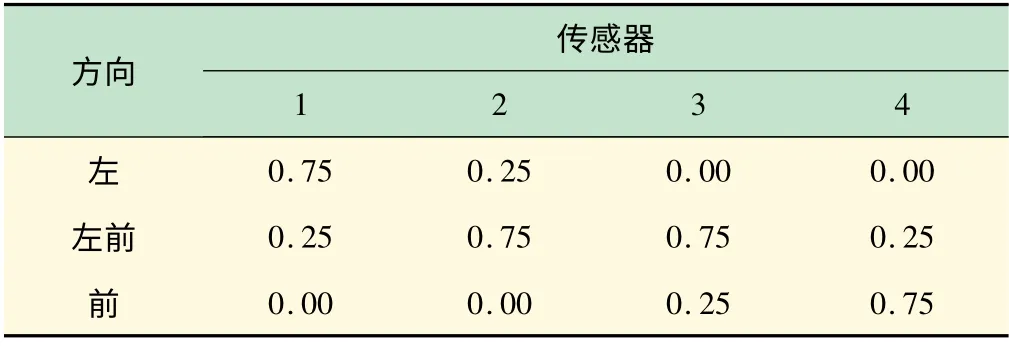
表1 划分空间中传感器信号的概率
2 智能小车总体方案
2.1 系统的结构设计
智能小车采用超声波探测方式,通过比较布置在车身前侧上的具有不同朝向的超声波探测器完成目标的探测,然后通过单片机整合各路超声波信号的强度以及温度信息,最后输出控制左右2 个电机,完成5 种运动状态。系统结构框图如图3 所示。
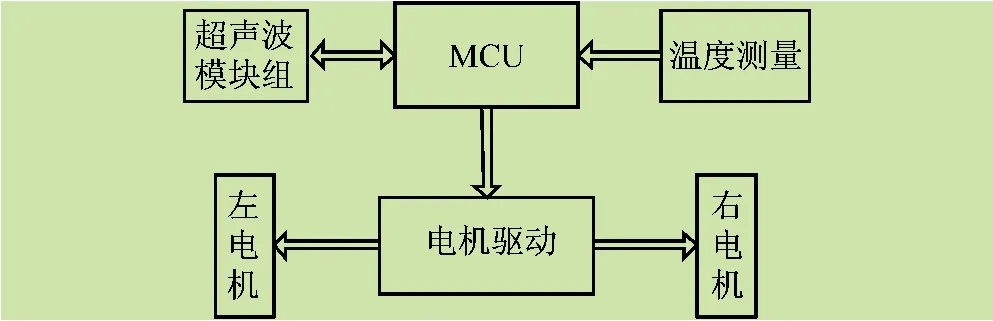
图3 系统结构框图
本设计中,硬件方面主要包括车型智能小车、传感接收电路、主控电路板和无线发射装置。通过单片机产生的20 kHz 方波,经过放大后驱动超声波传感器发射头,从而发出超声波,遇到前方物体反射后由接收端捕捉。经过对2 个接收头捕捉时间的计算以及加入温度补偿,判断最终前方小车的方向与距离,再通过与前次数据差分计算出其相对前车的速度,最后通过速度距离以及位置3 个数据进行智能控制,控制小车转弯或减速慢行等[11-13]。
具体的硬件主要有:采用MSP430 单片机作为小车的微处理器;超声波传感器采用TCT40-16F/S(收/发);测温部分使用18B20 测出当前的环境温度用以判断出超声波传播的速度;电机驱动采用L298 芯片,用施加其Enable 脚的PWM 波实现智能小车的速度控制。
2.2 直流电机的伺服控制
智能小车的控制系统实质上是控制智能小车上的2 个电机的转速和方向。智能小车的任务是接收来自传感器的信号并对信号进行处理,根据预先编好的程序向驱动器发出指令。因为智能小车是依据传感器所得信息,经过单片机处理,即时作出反应,要求智能小车具有实时性和机动性,所以直流电机的驱动控制必须是伺服控制。
本环节以PWM 功放电路为驱动器,以光电编码器为反馈元件来构成电机伺服系统。其中位置、速度、电流等调节器的功能由微处理器来完成,速度反馈由计算机编程根据位置反馈量计算出来。全数字伺服系统的结构框图如图4 所示。
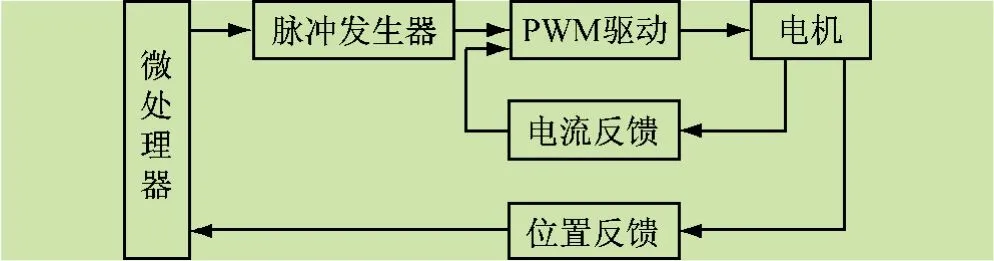
图4 全数字伺服系统结构
直流电机驱动电路使用最广泛的就是H 型全桥式电路,这种驱动电路可以 很方便实现直流电机的4象限运行,分别对应正转、正转制动、反转、反转制动。它的基本原理图如图5 所示。
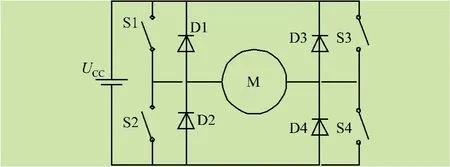
图5 H 型桥式驱动电路
2.3 H 型桥式驱动电路
全桥式驱动电路的4 只开关管都工作在斩波状态,S1、S4 为一组,S2、S3 为另一组,两组的状态互补,一组导通则另一组必须关断。当S1、S4 导通时,S2、S3关断,电机两端加正向电压,可以实现电机的正转或反转制动;当S2、S3 导通时,S1、S4 关断,电机两端为反向电压,电机反转或正转制动。
2.4 智能小车系统主程序框图
智能车的运行控制是根据路径识别和车速检测所获得的当前路径和车速信息,控制舵机和直流驱动电机动作,从而调整智能车的行驶方向和速度[14]。控制 系统的软件设计基于keil 3.0 编程环境,使用C 语言实现。图6 为控制系统软件流程图。
3 测试结果及分析
在多障碍物环境中避障行驶的轨迹如图7 所示,图中虚线表示智能车辆运行轨迹,方块表示障碍物(15 cm×30 cm)。智能车的参数为轮距d =15 cm,前轮最大转角αmax=360°,最大速度vmax=4.5 m/s,最小速度vmin=0.1 m/s,采样间隔为0.02 s。
智能车辆同时探测到多个障碍物,根据距离判断是否对自身运行构成影响,障碍物间的距离是否可以通过,启动避障程序,避过多个障碍物,安全通过了障碍区,达到了预期效果[15]。智能车结构图如图8 所示。
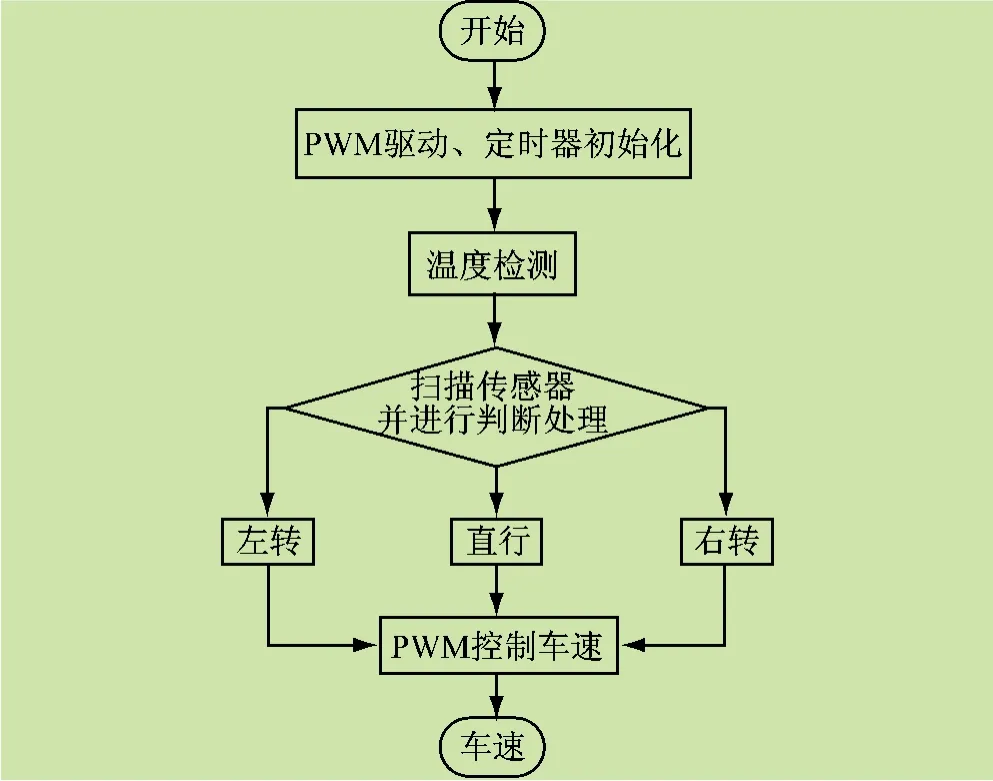
图6 主程序框图
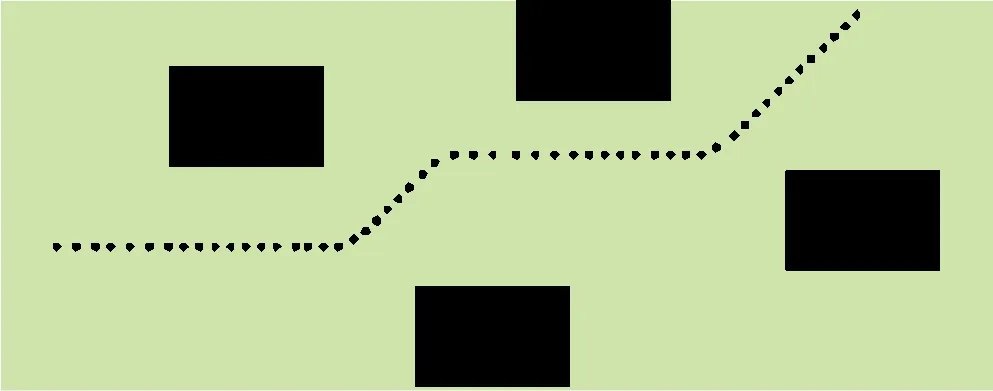
图7 多障碍物环境行驶轨迹
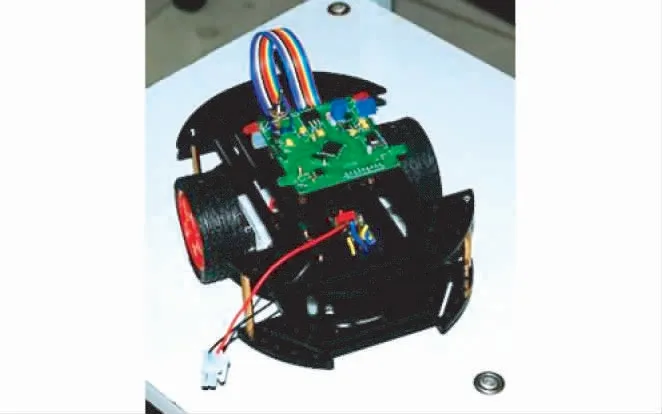
图8 智能车结构图照片
4 结 语
结合了超声波传感器可以使智能车辆实现避障功能,提高在不确定环境中行驶的可靠性。本文给出了超声波探测模型以及智能小车的总体设计,能够在未知障碍物环境中准确探测,并及时避障。经过实际的测试,智能小车实现了避障要求,并且在行驶中具有较高的可靠性。
[1] 卓 晴,黄开胜,邵贝贝,等. 学做智能车[M]. 北京:北京航空航天大学出版社,2007 .
[2] 欧伟明.智能小车足球比赛无线通讯子系统的设计[J].电气自动化,2007(4):45-47.
[3] 张 志,单越康,项 荣,等. 融合视觉和嗅觉的管道探测智能小车的设计与实现[J]. 智能小车,2006,28(5):499-500.
[4] 魏玉虎,石琛宇,姜建钊,等. 基于视觉的智能车转向控制策略[J].电子技术应用,2009(1):130-134 .
[5] 王 建,张晓炜,杨 锦,等. 基于视觉传感器的自主循迹智能车的设计与实现[J].工业仪表与自动化装置,2010(6):34-37.
[6] 吕晶晶,杜 力. 基于双超声波接收头的防撞小车系统[J].价值工程,2010(22):148-149.
[7] 张建民,王 涛,王忠礼. 智能控制原理及应用[M]. 北京:冶金工业出版社,2003:1-50.
[8] 杨万海. 多传感器数据融合及其应用[M]. 西安:西安电子科技大学出版社,2004:152-160.
[9] 李 进,陈无畏. 自动导引车视觉导航的路径识别和跟踪控制[J].农业机械学报,2008,39(2):20-24.
[10] 王檀彬,陈无畏,李 进,等. 多传感器融合的视觉导航智能车避障仿真研究[J].系统仿真学报,2009 (4):1015-1019.
[11] Barshan B,Baskent D. Morphological surface profile extraction with multiple range sensors [J]. Pattern Recognition (S0031-3203),2001,34(7):1459-1467.
[12] 邓 岳,周 辉,谈英姿.基于MC9S12DG128 单片机智能车设计与实现[J].实验室研究与探索,2008(1):67-69,130.
[13] Choset Howie,Nagatani Keiji,Lazar Nicole A. The arc-transversal median algorithm:A geometric approach to increasing ultrasonic sensor azimuth accuracy[J]. IEEE Transactions on Robotics and Automation (S1042-296X),2003,19(3):513-522.
[14] 张 静,王国宏,梁发麦,等. 基于证据理论的SAR 图像融合识别方法[J]. 系统仿真学报,2007,19(9):2053-2057.
[15] 王檀彬,陈无畏,焦 俊,等. 多传感器融合的智能车辆导航研究[J].中国机械工程,2009 (11):1381-1385.
猜你喜欢
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
文苑(2018年22期)2018-11-19
电子制作(2018年17期)2018-09-28
电子制作(2018年8期)2018-06-26
军事文摘·科学少年(2016年7期)2016-09-20
电子制作(2016年21期)2016-05-17
水利科技与经济(2016年4期)2016-04-22