
基于图像处理的贴合机自动纠偏系统
2013-07-13 06:30:44赵茹陶晓杰王鹏飞
电子设计工程 2013年3期
赵茹,陶晓杰,王鹏飞
(合肥工业大学 仪器仪表与光电工程学院,安徽 合肥 230009)
文中研究的自动贴合机它的主要功能是将加强片贴合到FPC29800产品上,以防止柔性电路板发生翘曲现象。贴合机在粘贴的过程中由于多种因素,导致物品存在偏移或者旋转,它将直接影响到产品的质量和生产效率。为了保证最后贴合的产品达到生产要求,具有较高的精度,文中通过视觉系统对加强片进行精确定位[1]。
1 视觉系统的设计
自动贴合机通过图像采集设备,将真空吸取的加强片进行图像采集,并将采集到的图像传送到液晶显示器,采集图像与机器存入的标准图像进行比对,计算采集图像X、Y轴的偏移量和旋转角度θ,将偏移量和旋转角度传送给工业控制机,最后由工业控制机控制精密机械平台实现加强片的位置纠正[1]。
贴合机自动纠偏系统主要由工业彩色用CCD,镜头,照明光源,图像采集卡、图像处理单元、计算机组成[2]。系统结构如图1所示。贴合机要贴合的加强片如图2所示。
1.1 硬件的选择
本研究选用的CCD为松下(Panasonic)WV-CP60;镜头为 AVENIR(日本精工)LENSSE1212,焦距为 12 mm;图像采集卡采用天敏SDK2000,显示分辨率可达640×480。
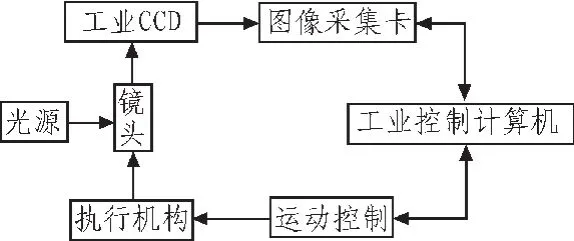
图1 系统结构框图Fig.1 System structure
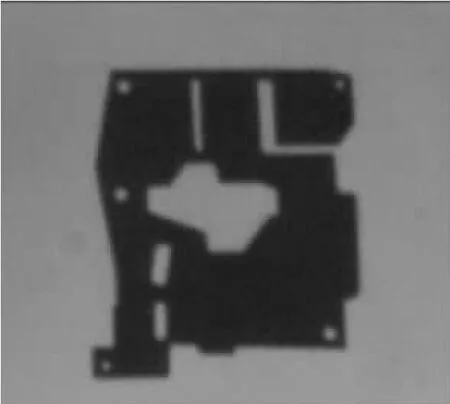
图2 加强片Fig.2 Strengthen the piece
1.2 图像预处理
在采集图像的过程中,由于环境因素、机器振动等各种因素导致采集的图像模糊不清,需要对图像进行各种预处理,以便后续的检测[3]。文中对加强片进行图像采集,由于待采集的加强片形状规则,结构简单,边缘容易检测,因此首先对图像进行边缘检测[4],采用Canny算子,该算子提取的边缘线型连接程度较好,边缘提取的较完整,边缘线划很细。摄像机采集到的图像如图3所示,边缘检测后的结果如图4所示。
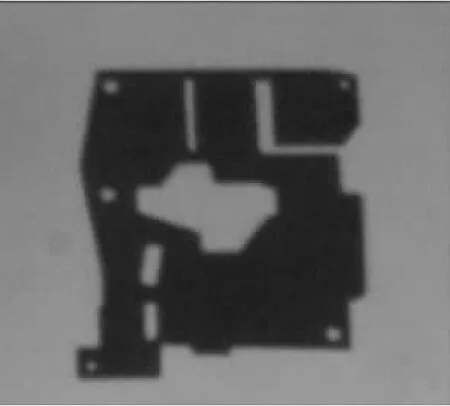
图3 原始图像Fig.3 Original image
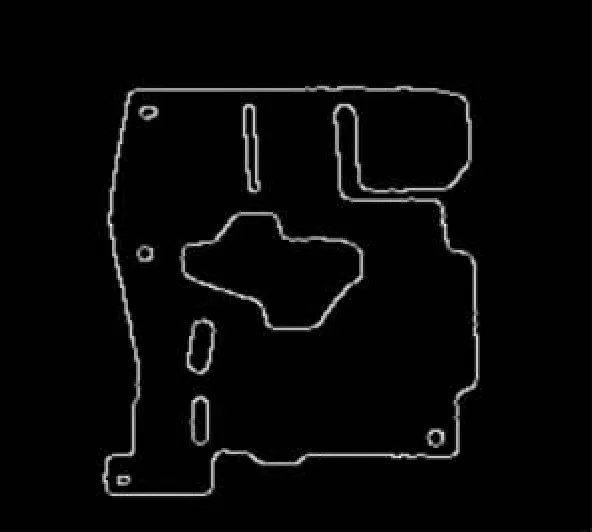
图4 边缘检测的图Fig.4 Edge detection of the image
1.3 图像配准
1.3.1 Hough变换
从图4可以看出经过边缘检测后的图像边界清晰,直线比较明显,容易检测,因此使用Hough变换检测直线的方法来检测旋转角度[5]。文中采用了平均角度法,即对所有检测到的直线斜率求角度,计算平均值,得到旋转的角度。Hough变换通过对各个角度6个样本进行检测(由于实验条件限制,6个样本是通过matlab软件对原始采集到的一幅图像进行旋转得到的,旋转角度已知),得到的结果如表1所示。
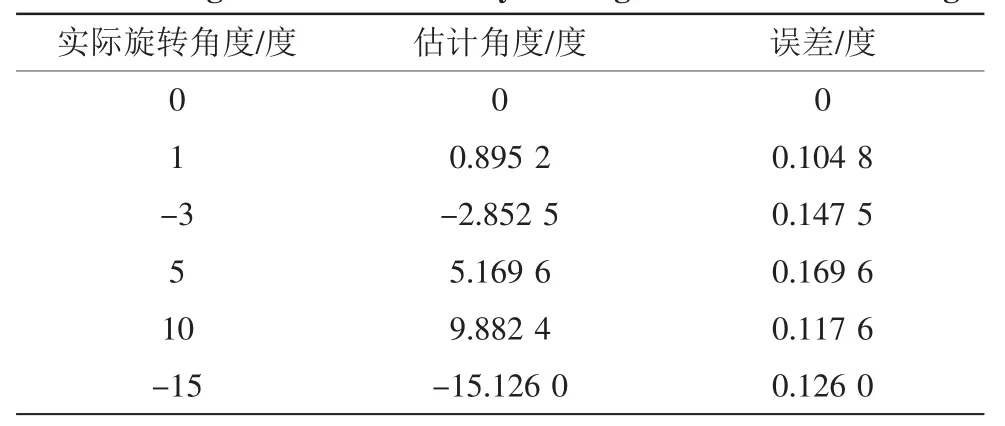
表1 Hough变换检测旋转角度Tab.1 Hough transform to carry out angle detection of the image
1.3.2 插值和相位相关的图像配准
首先通过对源图像进行插值,提高图像的分辨率,之后进行傅里叶变换,通过相位相关检测图像之间的位移,可以使检测精度达到亚像素级别。
插值算法采用不引入新采样点的改进的三线性算法,其按照周围的8个像素点的空间距离分配权值,使周围8个像素点联合贡献灰度分布统计。它计算精确,对小的空间移动会产生平滑作用。
相位相关法:两幅图像之间傅里叶变换的互功率谱为
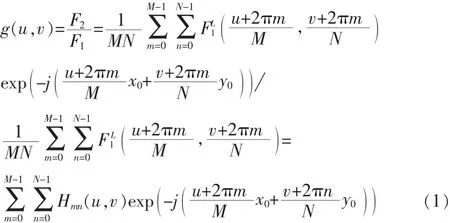
其中,F1,F2为原始图像的傅里叶变换,FL1,FL2为原始图像插值放大M、N倍后的傅里叶变换图像,x0,y0为检测的位移。
通过对归一化互功率谱进行傅里叶逆变换得到单位脉冲函数,它的峰值所对应的坐标为检测的位移偏移量。文中通过对采集到的5幅图像进行偏差检测,得到的结果如表2所示。
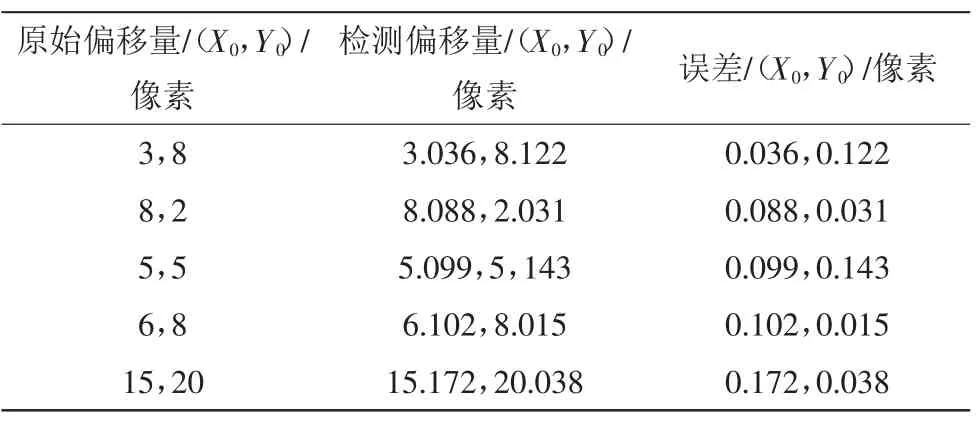
表2 偏差检测结果Tab.2 Result of deviation detection
通过检测结果可以看出,该方法能够进行亚像素级的配准,检测精度符合贴合机贴合精度的要求。
2 系统标定
系统标定用来确定测量系统的输入—输出关系,它在改善系统准确度和消除系统误差方面有着重要的作用。摄像机标定分为2种:传统的摄像机标定方法和摄像机自标定方法[6]。由于贴合机其精度要求高、成像位置确定等因素,文中采用传统的标定方法。文中自动贴合机标定主要是计算图像坐标与相机坐标的关系,以及相机坐标相对于工作台的坐标。
2.1 图像坐标到相机坐标的变换
首先采用万能工具显微镜对标准加强片进行实际尺寸的测量,利用工作台吸头吸取加强片到达摄像机上方,对加强片进行拍照,读取测量对象的像素尺寸。利用被测目标实际尺寸与对应像素尺寸进行比较,连续多次进行相同的标定试验,取平均值,分别求出行和列方向的像素比例因子,即CCD图像中每个像素对应的物理单位长度。
2.2 相机坐标系到机器坐标系的变换
需要求出相机坐标系原点在机器坐标系中的位置与两坐标系X轴之间的夹角。文中主要采用了逐次逼近法对两坐标系之间的夹角进行了计算。
首先假定两坐标系之间的夹角为零,利用吸嘴吸取待贴物品,将其运动到相机视区的正中央,保持Y坐标不变,让其运动到视区的最左边并保证整个物品都在视区里面,获取物品图像,计算它的中心坐标(x1,y1),同样让物品运动到视区的最右边,计算中心坐标(x2,y2)。通过下列公式可计算出这个夹角。

然后通过检测的角度将物理坐标系相对相机坐标系旋转-θ度,重复上面的步骤,直到最后检测的角度小于某个给定的阈值。把最后得到的这个角度记为相机坐标系与机器坐标系X轴之间的夹角。
3 结 论
文中介绍了贴合机自动纠偏的系统组成,对采集到的图像进行预处理、图像配准,摄像机标定,得到待贴物品的偏移数据。通过多次试验对比表明,该方法能够对待贴物品进行精确定位,满足系统的要求,具有很高的应用价值。
[1]房超.机器视觉及其在工业检测中的应用[J].自动化博览,2007,25(4) :46-48.
FANG Chao.Machine vision and its application in industry inspection[J].Automation Panorama,2007,25(4):46-48.
[2]汪宏升,史铁林.高精度机器视觉对准系统的研究与设计[J].光学技术,2004,30(2):235-239.
WANG Hong-sheng,SHI Tie-lin.High precision alignment system research ang development in machine vision[J].Optical Technique,2004,30(2):235-239.
[3]冈萨雷斯.数字图像处理[M].2版.阮秋琦,阮宇智译.北京:电子工业出版社,2003.
[4]Rishi R R,Chaudhuri P.Thresholding in edge detection:a statistical approach[J].IEEE Tran on Image Processing,2004,13(7):927-936.
[5]李中科,杨晓辉,吴乐南.针对旋转和平移运动的一种图像准方法[J].应用科学学报,2005,23(3):282-286
LI Zhong-ke,YANG Xiao-hui,WU Le-nan.A method of image registration for two rotated and translated images[J].Journal of Applied Sciences,2005,23(3):282-286
[6]伍雪冬,蒋新华,李建兴.计算机视觉中传统摄像机标定方法综述[J].福建工程学院学报,2007,5(1):57-61.
WU Xue-dong,JIANG Xin-hua,LIJian-xin.Review of traditional camera calibration methods in computer vision[J].Journal of Fujian University of Technology,2007,5(1):57-61.
猜你喜欢
汽车维修与保养(2020年11期)2020-06-09 05:42:16
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
数学大世界(2018年1期)2018-04-12 05:39:03
中国公共安全(2017年8期)2017-10-13 08:12:17
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
中等数学(2017年2期)2017-06-01 12:21:50
中国公共安全(2017年11期)2017-02-06 05:27:47
办公自动化(2016年18期)2016-12-17 19:32:18
光学精密工程(2016年3期)2016-11-07 09:03:34
新闻前哨(2015年2期)2015-03-11 19:29:25
