
基于FPGA的激光测距回波信号高速采集研究
2013-07-13 06:30刘继勇王小淘
电子设计工程 2013年3期
刘继勇,王小淘
(西安工业大学 电子信息工程学院,陕西 西安 710021)
激光由于其高单色性、高方向性以及相干性好,激光测量技术相比其他测量手段具有独特优势,得到了长足的发展。测量距离的方法很多,主要有干涉法测距、三角法测距和 TOF法测距[1]等方法。激光测距利用干涉法测距的原理,主要有以下两种方法:相位测距和脉冲测距。相位式激光测距是利用较低频率的电信号调制高频光信号,使光通量发生周期性的变化,通过测量调制光信号往返一次的相位改变量来实现距离的测量,具有测程近和需要合作目标等缺点。脉冲式激光测距是利用光脉冲往返于测距仪和目标之间的传播时间实现距离的测量,主要适用于大距离或超大距离的测量,且测量精度一般为米级。具有测量精度较低、体积大等缺点[2]。本文主要研究的基于FPGA的脉冲式激光测距系统,既适用于长距离测量,又适用于短距离测量,而且测量精度较高。
1 脉冲激光测距原理
脉冲激光测距利用了激光在空气中传播速度基本恒定的特性,它通过测定激光脉冲在被测目标距离走一个往返的时间来测定目标的距离[3-4]。激光测距雷达对目标发射一个或一列很窄的光脉冲(脉冲宽度小于等于50 ns),测量自发射光脉冲起始,到达目标并由目标返回到接收机的时间,由此计算出目标距离如图1所示[4]。
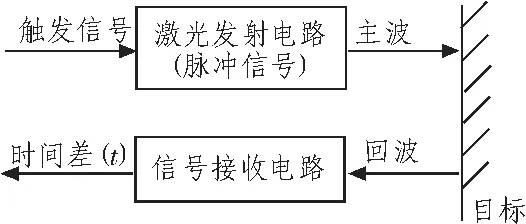
图1 脉冲激光测距原理图Fig.1 Schematic of the pulsed laser ranging
设目标距离为R,光脉冲往返经过的时间为t,光在空气中传播速度为c,则

式中,t是光脉冲发射到目标然后从目标返回到接收机的时间间隔。它是通过计数器计数这一时间间隔内进入计数器的钟频脉冲个数来测量距离的。设在这段时间里有n个钟频脉冲进入计数器,钟频脉冲之间的时间间隔为τ,钟频脉冲的振荡频率为f=1/τ,则

式中,l=c/2f表示每一个钟频脉冲所代表的距离基准,计数得到n个钟频脉冲,就得到距离R。l的数值确定了测量的精度。
2 回波信号采集的实现
典型的脉冲激光测距系统主要由激光发射系统、回波接收系统、信号处理系统组成。工作过程大致如下:当测距仪对准目标后,激光器发射出激光脉冲,同时截取部分光波作为触发信号,使计时电路开始对时标脉冲进行计数;经目标散射后形成的激光回波信号通过光学接收天线后,为光电探测器所接收,将光信号转换为电脉冲信号,经过放大整形后作为计数器停止计数的控制信号;然后,从计数器中读取脉冲数n,结合时标脉冲的周期τ,进而可以通过式(2)计算出距离R[6]。
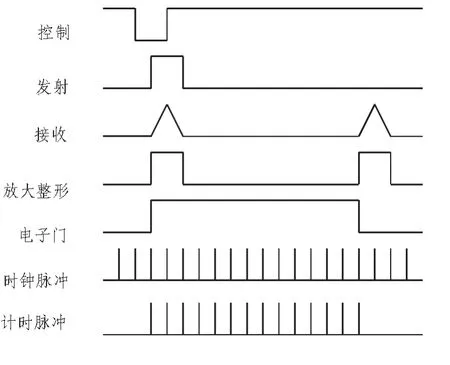
图2 脉冲测距时序图Fig.2 Pulse Ranging timing diagram
当取样信号脉冲与回波信号脉冲的上升沿或下降沿的时间差小于几个纳秒时,传统的测量脉冲宽度的脉冲计数法已不再适用。这是因为要测的脉冲越窄,所需要的时钟频率就愈高,对芯片的性能要求也越高。例如要求1 ns的测量误差时,时钟频率就需要提高到 1 GHz,此时一般计数器芯片很难正常工作,同时也会带来电路板的布线、材料选择、加工等诸多问题。
为满足低量程时精度要求较高同时又满足测量量程大时精度要求低的技术要求,设计时采用FPGA芯片(EP2C8)来实现高速采集与数据处理,有效地提高了测距精度。下面将系统的设计与实现进行详细阐述。
3 回波采集系统设计
脉冲激光回波信号由目标反射信号和系统噪声叠加而成[7]。因此信号接收系统由信号接收电路与低通滤波电路两部分组成。信号接收电路主要通过光电二极管将光信号转换为电信号,并对电流信号进行滤波放大转换为电压信号输出,经由FPGA快速采集并完成信息处理及储存[8]。
为实现对激光回波信号的数字接收,通过QUARTUS II软件,设计了FPGA回波信号接收模块RECEIVE,主要作用是接收脉冲激光器的回波触发信号,根据回波信号触发FPGA内部计数器停止计数,接收模块如图3所示。其中,REBEGIN为重新开始信号,当完成一次计数后,REBEGIN清零,停止计数。CLK_200 MHz为时钟信号。RECEIVE为接收信号,接收从激光脉冲发射器发射出的激光信号。
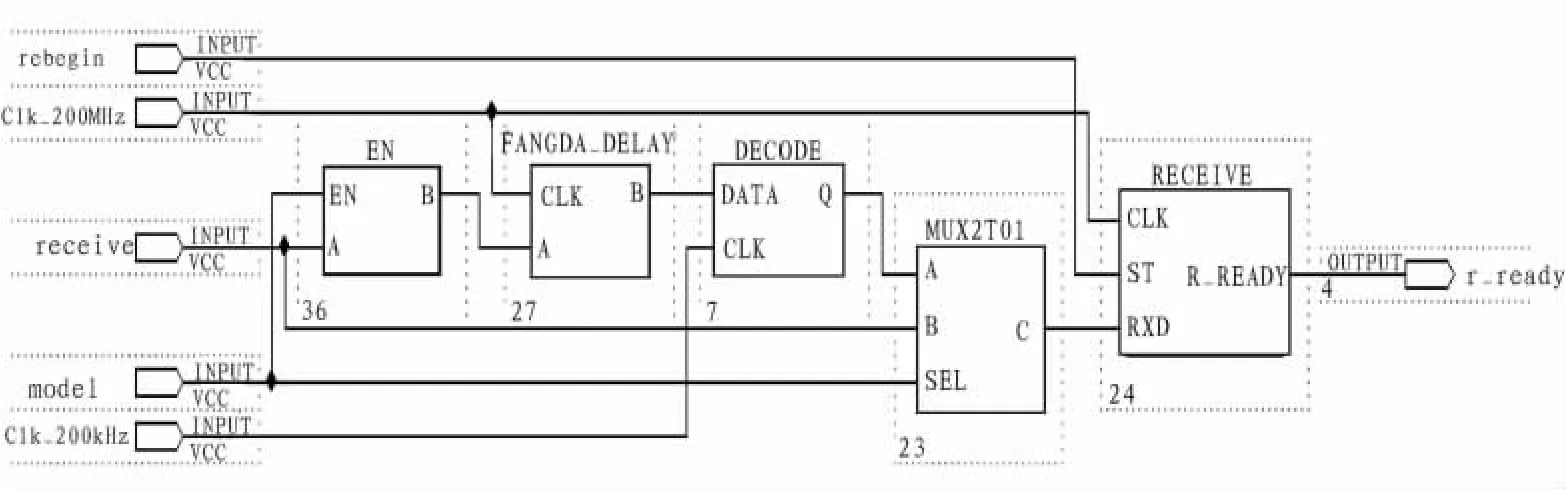
图3 接收模块Fig.3 Receiver modules
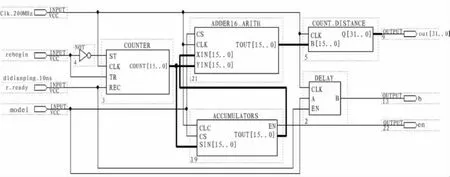
图4 计数模块Fig.4 Counting modules
计数模块COUNTER主要作用是在发射激光脉冲的同时,启动计数器,在接收到激光回波信号的同时,停止计数,将计算结果送给LED显示,计数模块如图4所示。其中,CLK_200Mhz为系统时钟信号。REBEGIN为重新开始信号。R_READY为计数停止信号。OUT[31..0]为计算完的距离,送至LED显示。B每完成一次计数,延时约800 ns产生高电平。EN当完成累加,产生一个确认信号。
由图5可以看出,当接收到RECEIVE模块的R_READY信号时,计数停止,COUNTER模块计算当前距离,将计算结果送至LED模块。
数据接收完成后,通过编程先将数据存储到RAM中,再将RAM中的数据读出进行后续处理,从而准确地判别回波信号,自动设置阈值,达到提高回波检测精度和距离判别准确度的目的。
4 实验结果
将设计系统应用到实际测距系统中,实验结果如表1所示。
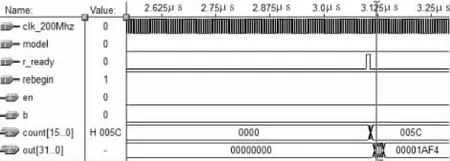
图5 接收模块仿真图Fig.5 Simulation diagram of the receiver module
5 结 论
本文简明扼要地介绍激光脉冲测距的基本原理,在此基础上设计了基于FPGA的脉冲激光接收系统的基本电路图,通过对激光测距接收系统的研究分析,可以看出以上的测量结果精确度比较高,误差相对比较低。
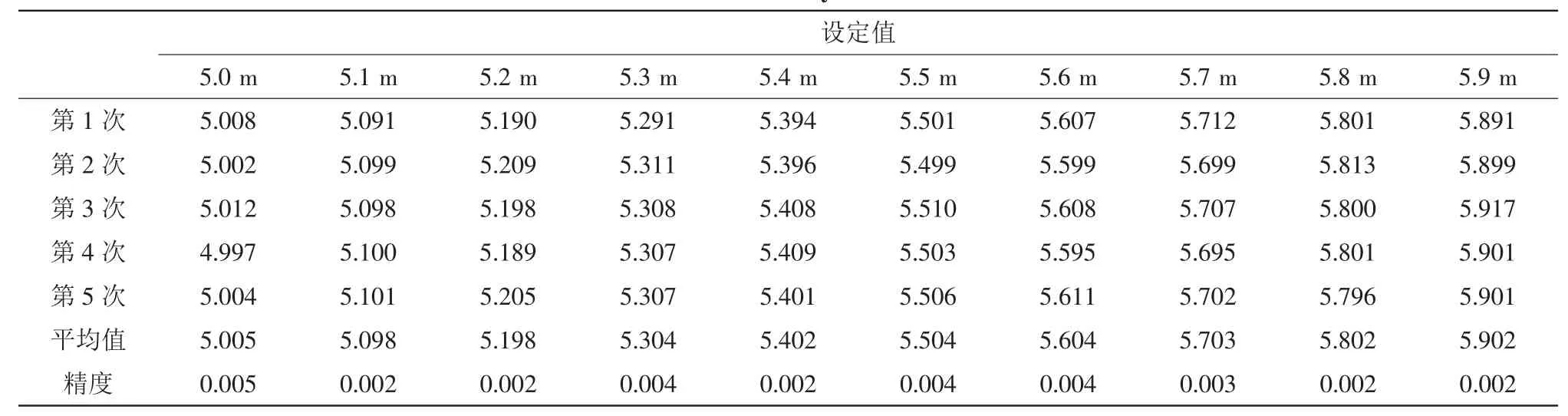
表1 实验室测试结果Tab.1 Laboratory text results
[1]Bosch T,Lescure M,Thompson B J.Selected Papers on Laser Distance Measurements[C]//Bellingham,Wash.SPIE Milestone Series,1995:736-1476.
[2]朱相磊,王寸记.脉冲-相位式激光测距仪[J].仪器仪表用户,2004,11(5):3-4.
ZHU Xiang-Lei,WANG Cun-Ji.Pulse-phase-shift laserrangefinder[J].Instrumentation Users,2004,11(5):3-4.
[3]戴永江.激光雷达原理[M].国防工业出版社,2002.
[4]张育琪,徐军,杨佩.脉冲激光测距接收电路的设计[J].电子科技,2010(4):30-32.
ZHANG Yu-qi,XU Jun,YANG Pei.Design of the receiver circuit in pulsed lased rang finding[J].Electronic Science and Technology,2010(4):30-32.
[5]胡炜.激光雷达回波信号处理与检测方法研究 [D].成都:电子科技大学,2003.
[6]陈千颂,杨成伟.激光飞行时间测距关键技术进展[J].激光与红外,2002,231(1):7-10.
CHEN Qian-song,YANG Cheng-wei.Lasertime-of-flight distance measurement technology[J].Laser and Infrared,2002,231(1):7-10.
[7]刘锋.脉冲半导体激光测距机的研制及应用[J].激光与红外,2006,32(2):118-122.
LIU Feng.Development and application of diode laser rangefinder, Laser and Infrared.2006,32(2):118-122.
[8]周毅刚,王春明,朱青.激光测距的高速采集与处理电路的设计[J].电子测量技术,2008,31(7):97-98,107.
ZHOU Yi-gang,WANG Chun-ming,ZHU Qing.Laser ranging,high-speed data acquisition?and processing circuit design[J].Electronic Measurement Technology,2008,31(7):97-98,107.
猜你喜欢
煤气与热力(2022年2期)2022-03-09
科学(2020年3期)2020-01-06
测控技术(2018年6期)2018-11-25
通信电源技术(2018年5期)2018-08-23
制导与引信(2017年3期)2017-11-02
电子制作(2017年7期)2017-06-05
小猕猴学习画刊(2016年6期)2016-05-14
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10
电子设计工程(2014年18期)2014-02-27
