
雷达目标跟踪模拟技术
2013-07-03 06:06:40许文忠张阳阳王梓斌赵乐至
兵器装备工程学报 2013年5期
许文忠,张阳阳,王梓斌,王 勇,赵乐至
(西北核技术研究所,西安 710024)
雷达目标跟踪模拟是雷达调试与跟踪试验的一项重要技术工作。该工作主要完成雷达对固定航路的已知回波起伏目标进行跟踪模拟实验,并对雷达动态跟踪精度进行检查,是进行任务动态试验的前提条件。传统的跟踪模拟是对任务航段的雷达杂波进行扫描,对目标的的回波特性进行理论估算,存在着诸如数据处理量大、周期长等缺陷。本文提出一种新的雷达跟踪模拟方法,实现了雷达目标的真实环境下目标的跟踪模拟。
1 雷达工作原理
雷达系统使用调制波形和方向性天线来发射电磁能量到空间的特定区域搜索目标,组成框图如图1 所示。雷达发射机产生所需强度的高频脉冲信号,并将高频信号馈送到天线发射出去,观测目标波散射回波,雷达天线接收到目标散射的微弱射频信号,高频接收组件将接收到的信号放大后送入微波滤波器,滤波后的信号进入混频器进行下变频,将信号变成第一中频,之后进行二次混频,形成反射中频信号,经放大和检波,送入信号处理器与显示设备。以上的操作均在雷达主控计算机的统一协调下完成。

图1 雷达系统组成
2 雷达目标模拟器
雷达目标模拟器在设计和调试雷达系统的过程中,模拟雷达回波信号代替实际的雷达回波信号,处理多普勒模糊和距离模糊等技术要求,降低系统设计和维护过程中所需的费用。
模拟器根据目标的轨迹参数[1],目标的时延,多谱勒频率及相关参数,模拟线性调频、非线性调频、相位编码等复杂雷达信号回波,模拟静止、匀速、匀加速及变加速等目标回波,可以设置目标起始距离、终止距离、速度、加速度、多普勒频率、目标起伏特性、目标消隐等。实现任意可能的目标航迹。
目标模拟器分为4 个部分[2]:①和、差信号形成器;②微波信号源;③和、差信号控制器;④航路产生器。

图2 雷达模拟器系统
1)距离模拟
雷达控制计算机将目标斜距R 值送测距机,测距机按R值生成模拟目标距离脉冲,送频率综合器。频率综合器产生高频脉冲,送射频模拟器。
模拟器目标脉冲具有一定时间延迟的目标回波。雷达接收到目标反射的回波与雷达发射信号之间的时间延迟,反映了目标对雷达天线的径向距离。在无距离模糊的情况下,目标的径向距离R 与延迟时间t 之间的关系为

式中:C 为电波在空中的传播速度约3 ×108m/s;R 为目标的径向距离。
在有距离模糊的情况下目标的径向距离R 与延迟时间t之间的关系式变为

式中:RT为重频周期对应的距离值;N 为模糊周期。
将雷达主控机产生的距离码R 转换为延迟目标脉冲;用R 距离值控制目标中频/射频脉冲幅度,从而形成距离因子A的模拟。
目标回波随距离的衰减特性可由雷达方程确定,将雷达方程化简为

式中:C0为由雷达参数确定的常数;Pr为目标回波的功率(W);R 为目标到雷达的距离(m)。
雷达接近目标回波的功率与目标到雷达的距离R4成反比[3]。

图3 回波脉冲形成功能
距离因子的模拟在射频实现,用距离数控衰减器来控制射频脉冲幅度变化来模拟。由于目标距离不同,接收信号强弱变化。
2)目标角度模拟
目标角度模拟是实时模拟由于天线扫描或目标运动,使天线波束相对目标位置不断改变而造成接收雷达回波信号变化。角度模拟主要是对雷达天线方向性图的模拟。所以角度模拟输出U(θ)可表示为[4]

式中:Eθ为波束对准目标时接收信号归一化值;F(θ)为雷达天线方向性图函数。
目标角度模拟是按目标角度特性对回波信号进行方向幅度加权及相位变化来逼真地模拟目标角度信息。目标角度特性包括目标的方位角、俯仰角。
角度模拟原理框图见图4。
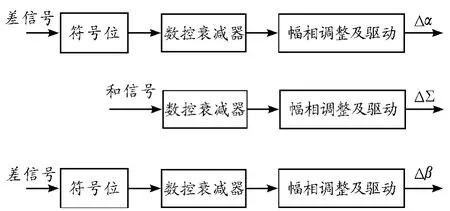
图4 角度模拟原理
3)多普勒模拟
当目标相对雷达作径向运动时,目标回波产生多普勒的频移,雷达用测量多普勒频率或目标回波距离上的时间变化率的方法进行测速,所以目标速度的物理特性模拟就是多普勒频率的模拟。
当雷达发射机和接收机在同一位置时,多普勒频率可表示为

式中:λ 为发射波长;ur为目标径向速度。
雷达运动目标多普勒特性的模拟是提供一个同目标距离相关的多普勒频率,为了保证测速系统频率稳定跟踪的要求,模拟的多普勒频率在变化时其相位必须连续,否则将形成视频干扰,破坏测速系统工作。
4)Swerling 2 型目标RCS 模拟
RCS 是个起伏量,要正确地描述它的起伏,必须知道其概率密度函数和相关函数。概率密度函数p(σ)给出目标截面积在σ 和σ +dσ 之间的概率,而相关函数则描述了雷达截面积在回波脉冲序列间的相关程度。Swerling 模型把典型的目标模型起伏分为4 种类型:有2 种不同的概率密度函数,2 种不同的相关函数,一种是在天线一次扫描间回波起伏是完全相关的,而扫描至扫描间完全不相关,称为慢起伏目标;另一种是快起伏目标,它的回波脉冲在脉冲至脉冲间是完全不相关的。
模拟Swerling-2 型目标RCS,根据雷达原理,该类型目标的概率密度函数为

它描述的目标的起伏特性为快起伏,脉冲间完全不相关。可以通过反函数法利用(0,1)均匀分布的随机变量λ 产生负指数分布的随机变量σ,对上式指数函数作积分

因此可得随机变量数

可以证明λ 在(0,1)区间上服从均匀分布,σ 为均值为的指数分布随机变量。利用产生的随机数σ 来对目标回波进行调制,即可完成模拟功能。
5)航迹模拟
雷达工作在模拟状态下,首先由雷达控制计算机按照空中点目标特性,运算飞行轨迹实时生成目标斜距R、方位角A、俯仰角E 等坐标[5]。
距离的模拟方式:雷达控制计算机将目标斜距R 值送测距机,测距机按R 值生成模拟目标距离脉冲,送频率综合器。频率综合器产生高频脉冲,送射频模拟器。
回波幅度的控制:射频模拟器通过一个衰减器控制模拟信号的强弱,来模拟目标回波的大小。
角度的模拟方式:射频模拟器通过3 路分配器,将模拟信号一分为3 路,产生单脉冲和、差、差3 通道高频模拟目标信号。2 路差通道分别设一个数控衰减器和0/π 调相器。角度模拟是按天线差波束方向图进行的,按照模拟目标方位、俯仰值与雷达天线方位、俯仰码盘值的差值(E,A)分别去控制方位和俯仰2 个差信号的大小,根据差信号的符号进行0/π 控制。
E,A 符号位表示偏离方向,在输出信号中表示和信号与差信号的0/π 相位关系

假设K=1,Δθ=0.05 mrad,θ0=1/2 波束宽度,可得Δ/Σ=-43 dB,所以数控衰减63 dB。
3 路各安置隔离器,保证3 路间隔离度,和差支路都设放大器,补偿0/π 调相器及数控电调衰减器的起始衰减,保证高频接收机的需要。
3 雷达目标跟踪模拟设计
雷达目标跟踪模拟的主要设计思路是雷达在发射机开机状态下,将环境反射信号与模拟器模拟的目标信号进行功率合成。组成示意图如图5 所示。
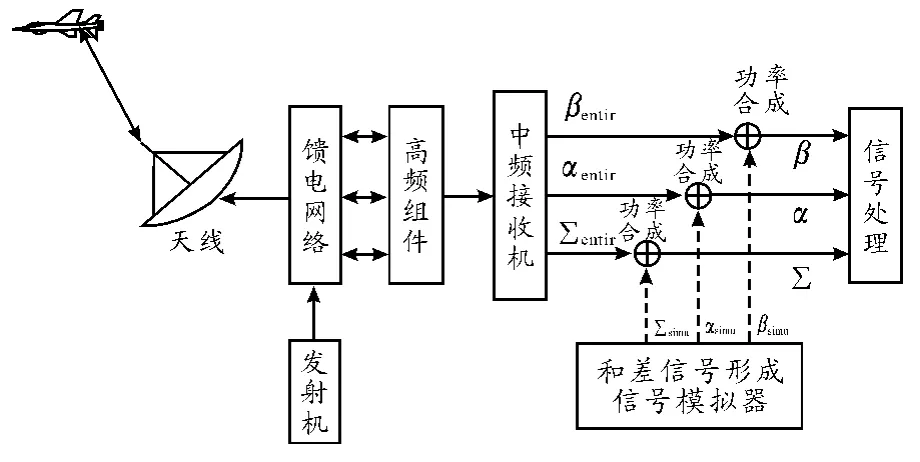
图5 雷达目标跟踪模拟组成示意图
模拟器产生的目标信号通过定向耦合器加到主讯道和、方位差、仰角差功率的合成信道上[2]。当航路产生器输出一个已知目标轨迹,设目标角度的参数为θm,而雷达实际所处位置的角度为θR。令θm-θR=Δθ,当Δθ 越大,则产生的角误差越大,这个角误差信号通过接收机处理后送入伺服,使天线向θm方向转动,θm变化时,θR也随着变化,并始终使Δθ趋向最小或0,这就是角度模拟。距离模拟是按照反射式雷达方程来计算的,通过距离延时器改变模拟信号源输出模拟脉冲信号的时间,产生距离上的时间模拟。发射机产生的微波信号经天线发射出去,由环境反射的回波信号由天线接收,经高频接收机、中频接收机,将和、方位差、仰角差信号通过定向耦合器加到功率合成信道上。由此实现了在天线扫描到某一方位,对于此方位上每一个距离单元,模拟的目标回波与实际环境的杂波回波叠加起来。
为保证模拟器与雷达同步工作,雷达使用频率综合器。频率综合器产生第一本振信号、第二本振信号、中频接收机控制时钟信号、连续波基准信号、中频采样时钟信号、发射微波激励信号以及模拟器需要的中频信号。频率综合器分为2部分:发射频综;接收频综。发射频综输出包括:发射激励信号、中频信号、中频采样时钟和中频控制时钟、模拟器需要的连续波信号、同步器时钟基准连续波信号。接收频综包括:第一本振信号、第二本振信号。
4 结束语
目前实验对航路规划的要求越来越高,雷达目标跟踪模拟是航路规划中一个关键问题。在实际工程中,通过上述方法研制了某型相控阵雷达视频回波模拟器,并进行了安装调试,在发射机开机状态下,由雷达信号模拟器模拟目标回波起伏,信号贯入雷达接收机,与雷达环境回波进行叠加,该模拟器所模拟的视频回波各项性能指标满足实验要求,达到较高的准确度,获得满意的试验训练效果。
[1]刘朝晖.实时雷达视频信号模拟器的研制[D].北京:北京理工大学,1994.
[2]卫健,陈定阶. 雷达目标模拟器[J]. 现代雷达,2002,2(1):55-57.
[3](美) M.I.斯科尔尼克.雷达手册[M].北京:国防工业出版社,1978.
[4](美)伊利.布鲁克纳.雷达技术[M].北京:国防工业出版社,1984.
[5]胡小川.机载相控阵雷达模拟器系统设计与实现研究[D].成都:电子科技大学,2003.
[6]程春华,吴进华,周大旺.一种基于SVM 的航路规划研究[J]. 海军航空工程学院学报,2010(1):61-64.
[7]孙世岩,张国栋.舰艇摇摆对雷达目标跟踪精度的影响分析[J].火力与指挥控制,2011(5):75-78.
[8]丁吉,樊琼剑,任博.未知环境中的无人侦察机动态航路规划[J].四川兵工学报,2012(5):28-31.
猜你喜欢
小哥白尼(趣味科学)(2021年6期)2021-11-02 05:23:48
故事作文·高年级(2021年4期)2021-05-06 03:20:04
小哥白尼(神奇星球)(2021年11期)2021-03-08 09:00:18
中国交通信息化(2017年10期)2017-06-06 07:13:20
电子制作(2016年1期)2016-11-07 08:42:54
学习月刊(2016年19期)2016-07-11 01:59:46
电子器件(2015年5期)2015-12-29 08:43:38
装备环境工程(2015年5期)2015-02-28 01:20:24
现代防御技术(2014年6期)2014-02-28 18:26:38
机械与电子(2014年2期)2014-02-28 02:07:47
