
漏泄电缆辐射特性自动循迹检测平台研究
2013-07-02 00:32江斌
电线电缆 2013年6期
江 斌
(上海电缆研究所,上海200093)
漏泄电缆辐射特性自动循迹检测平台研究
江 斌
(上海电缆研究所,上海200093)
为了提高漏泄电缆辐射特性检测的自动化水平,设计了一种多功能漏泄电缆辐射特性自动循迹检测平台,研究了控制系统中的自动姿态修正算法,开发了用户端上位机界面。经现场试验数据表明,该系统精度高、抗干扰性好。在自动测量过程中,行驶轨迹中心点偏移小于1 cm,测距误差小于0.4%,漏泄特性检测指标满足漏泄电缆生产厂家的技术要求。
漏泄电缆;姿态修正;自动循迹
0 引 言
漏泄电缆的辐射特性检测对于漏泄电缆生产厂家具有重要的意义[1]。传统的测试方法主要采用车载测试仪在导轨上沿漏泄电缆方向匀速移动进行测量,将测试数据通过无线方式发送到地面用户端进行显示[2-3]。为解决常规测试系统选用导轨造成的成本高、效率低的问题,本测试平台采用高精度自循迹方式,调整运动平台自动沿设计线路行驶,达到与导轨类似的运动效果。
1 系统总体结构
漏泄电缆测试中运动平台的技术指标,根据企业需求需要达到:(1)检测过程全自动,速度稳定且最小运动速度4 cm/s;(2)百米测距精度误差小于0.4%;(3)远程实时监控;(4)通用报表文件生成与保存数据;(5)系统机动性强。为实现上述要求,本文设计的系统总体框图如图1所示。
检测系统由上位机与下位机构成,下位机由车载PC、主控模块、数据采集模块、驱动机构、制动机构、通信模块及电磁干扰测试接收机(EMI接收机)构成。上位机由远程控制中心(PC)及信号源两部分构成。
其中,在遥控模式下主控器STM8L通过通信模块接收手持遥控器控制命令。自动导航模式下,根据姿态调整算法,控制平台沿着预定航线行驶,将数据采集模块的数据进行运算并上传至车载PC,同时接收车载PC的控制命令。数据采集模块主要包括编码测速模块、电量采集模块、循迹探头模块及超声测距模块。编码测速模块测量平台的行驶速度、位移及方向,并将结果返回给主控器。电量采集模块测量蓄电池电量剩余信息。超声测距模块测量平台前后左右四个方向的障碍物信息,确保行驶过程安全可靠。循迹探头模块检测轨迹位置,并返回主控器当前平台偏离航线的状态,给主控器修正平台姿态提供参考值。驱动模块包括无刷直流电机控制器、转向电机控制器及电磁刹车器。无刷直流电机控制器给主控器提供速度、方向、制动等控制接口,内置无刷直流电机驱动电路。转向电机控制器,改变平台行驶反向,配合姿态调整。电磁刹车保证平台良好的制动性及精确度。
车载PC是基于LabVIEW的人机交互界面,主要功能是接收远程控制中心的控制命令,将主控器上传的数据运算、存储、显示并转发,且控制移动车载平台的运行状态。目前,对于行驶控制[4]有很多软件和硬件[5]的方法。自动导航模式中,在轨迹约束条件[6-7]下通过循迹探头结合姿态调整算法调整行驶姿态。移动车载PC和主控器通过RS232进行通信,在测试高频信号时采用多节点红外通信,低频信号测试时采用无线互联网通信,提升传输效率的同时排除通信频段对实验的干扰。
2 高精度自循迹系统
本设计采用5路E3F-DS30C4光电传感器组成循迹探头,铺设吸光率较高的黑色轨迹带作为预定航线,循迹平台如图2所示,循迹平台共有7个传感器,两侧的2个作为限位用。
某个光电传感器检测到反射光线时,证明此时没有位于轨迹带上,返回高电平,读取循迹探头的电平可判断偏航状态。根据图3中的导航控制,姿态调整[8]过程简介如下:
图3中,α为车身与航线的夹角;v为行驶速度;l为前后驱中心长度1.5 m;r为最小转向半径;θ为转向角0~60°。
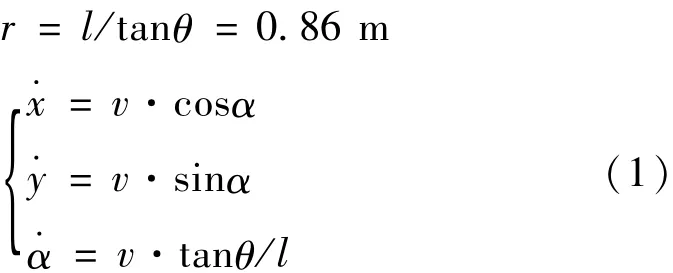
式中,x为航线的切线方向,y为航线垂直方向。其中初始化夹角α和y为零,当行驶过程中偏离航线时,α与y增大,轨迹探头读取到偏航状态。调整扭矩电机转向角θ,方向为y增加的反方向,使得α与y减小。当偏航角恢复时,修正转向角θ使得α等于零。
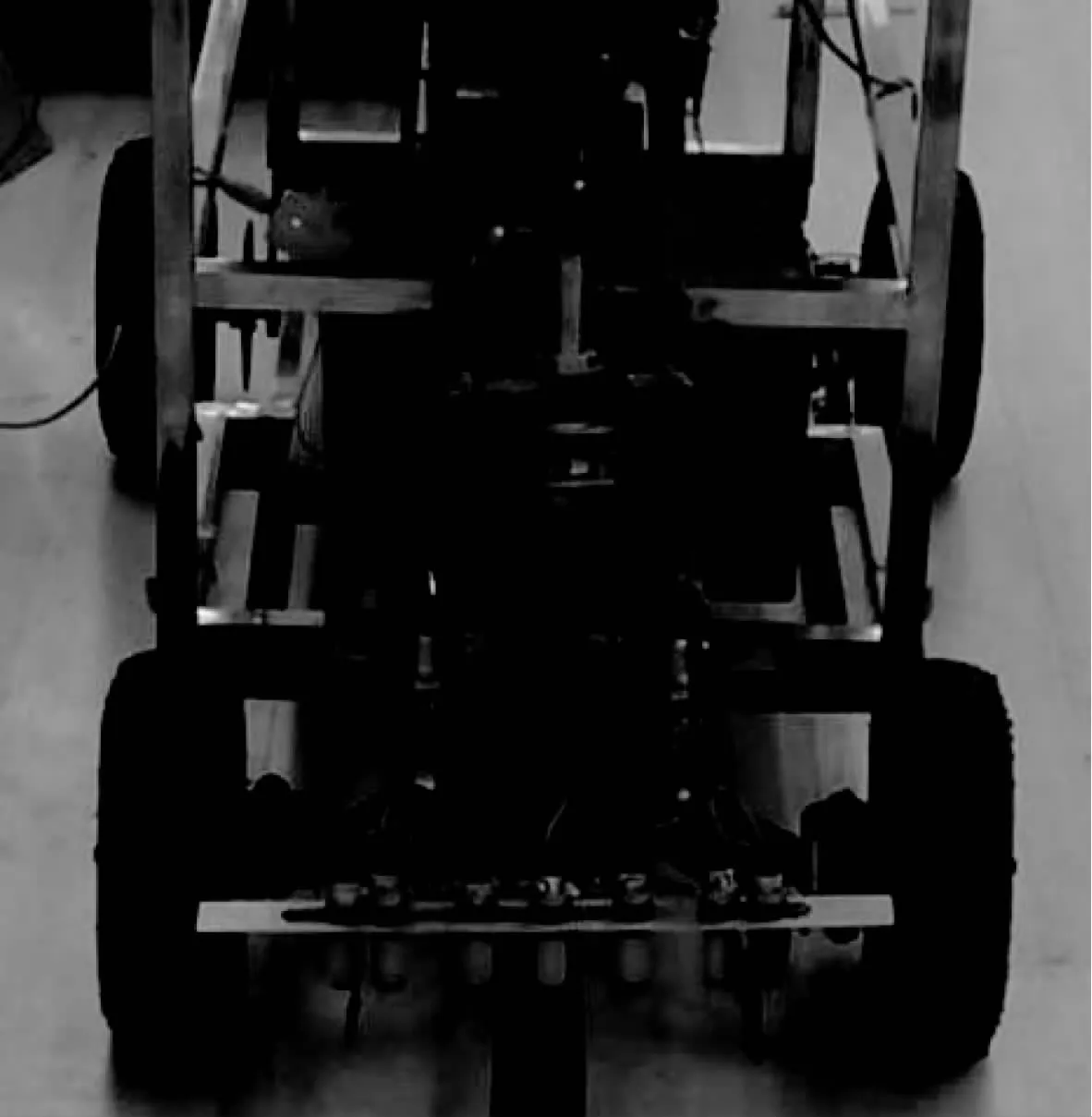
图2 循迹平台结构

图3 导航控制示意图
平台最小导航速度3cm/s,最大转向角60°。
3 软件设计
3.1 自动循迹软件设计
姿态调整通过模糊控制[9-10]过程实现,如图4所示。传感器模块即是轨迹探头,信号至模糊控制器单元,轨迹探头返回的电平值模糊化,根据知识库中的预设姿态控制算法进行逻辑判断,根据算法中偏航角与转向角之间的逻辑关系,解模糊化,输出给执行机构转向电机电平信号,调整姿态。
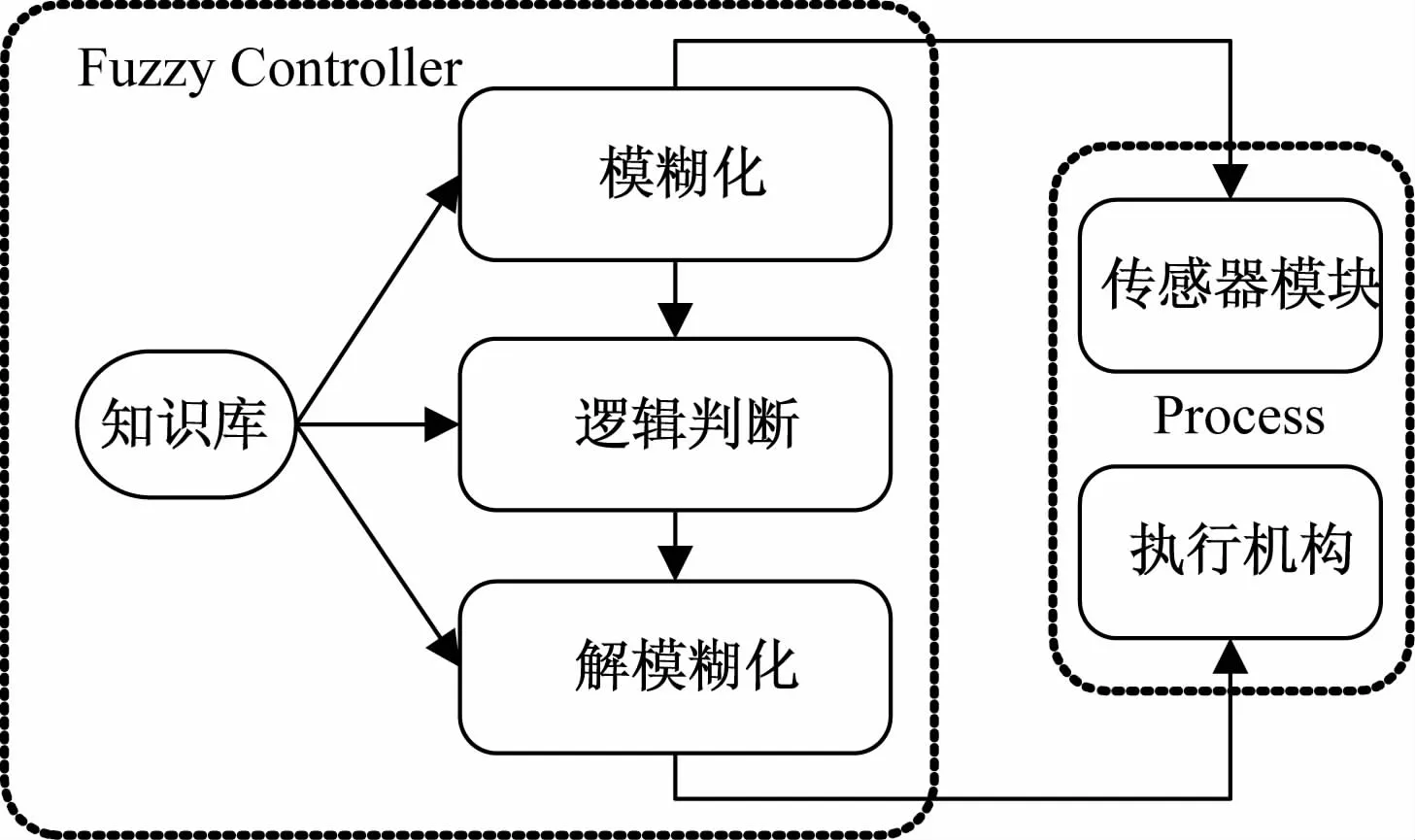
图4 模糊控制原理图
其中核心判断逻辑过程为:当平台中心航线偏出预定航线时,反方向增加转向角,当中心再次回到预定航线时,根据上一偏航状态修正转向角。
3.2 地面控制中心软件设计
上位机软件流程图如图5所示,分为高频测试和低频测试任务。
上位机软件界面如图6所示,分为工程树、绘图显示区、状态指示区、参数设置区及平台控制区五个部分。工程树中可完成新建测试任务、导入历史任务等功能。绘图区显示测试波形及测得的相关参数。状态指示区用来开始或者终止测试任务及显示当前工控状态。参数设置区用来设置漏泄电缆信号源的参数。平台控制区用来远程遥控平台及显示平台返回的状态信息。
4 实验和分析
实验采用的漏泄电缆为宽频带异型槽漏泄同轴电缆SLYWY-50-32,可使用频率为150 MHz、450 MHz、900 MHz、1800 MHz、1900 MHz、2200 MHz、2400 MHz。
(1)EMI数据实测
如图7所示,上位机接收车载PC上传的数据,绘制出测试点漏缆电磁信号的功率图,中心频率为150 MHz,功率为-50 dBm。由于测试处于低频段,采用2.4 GHz通信对实验没有影响。测得实验波形较为理想。
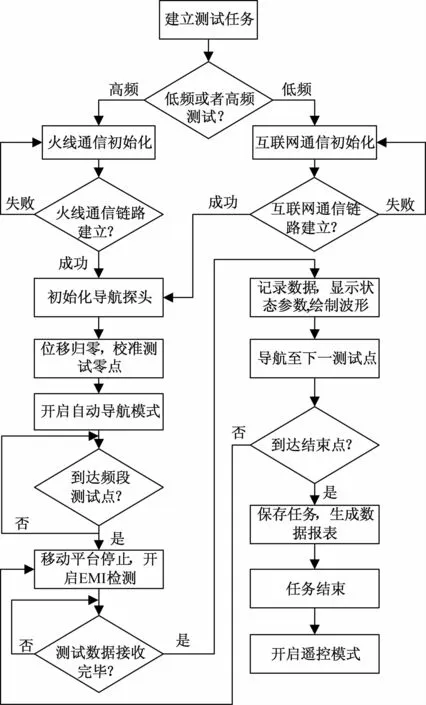
图5 上位机程序测试流程图
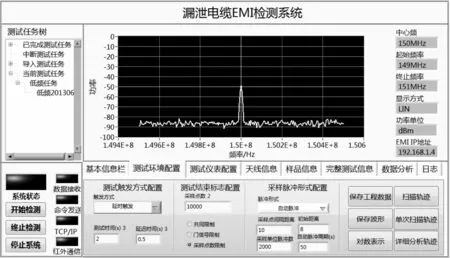
图6 上位机软件运行图

图7 上位机绘制的实验波形
(2)导航精度
加入姿态调整算法后,平台行驶速度为30 cm/s的导航运行效果图如图8所示,其中左右最大偏移小于1 cm。由于采用导航的是光电传感器,不同材质的吸光率不同,对导航路线有一定的影响,所以一个干净的实验环境是较为理想的。

图8 实验导航效果图
5 结束语
本车载移动测试平台,具备多种数据通信方式,多种移动平台的控制方案。配合姿态调整算法及上位机软件,可实现测试过程全自动。实验结果表明,系统基本达到了高效、高精度、高稳定性等技术要求,并顺利通过了企业用户的在线测试。
相比较传统测试系统而言,采用最新的半导体及传感器技术给系统带来较高的系统集成度、灵敏度、精确度及安全度,摆脱了传统检测系统有线设备及特定测试场地的局限性。系统能够广泛地应用于工控测试领域,具有广阔的应用前景。
[1] 舒 琳.铁路隧道中漏泄同轴电缆辐射场分布的计算[J].铁道学报,2002,24(2):69-73.
[2] 王均宏.漏泄同轴电缆辐射模式分析及高次模抑制[J].通信学报,2000,21(12):17-22.
[3] Rama Rao T.Near ground/floor RF path gain measurements in indoor corridors at2400 MHz for wireless sensor communications[J].Procedia Engineering,2012(30):836-843.
[4] 张金学.一种车型机器人路径规划方法[J].计算机仿真,2012,29(1):176-179.
[5] 彭 辉.Hermite三次样条插值的车型机器人路径规划研究[J].计算机工程与应用,2010,46(22):221-224.
[6] George P.Moustris.Switching fuzzy tracking control for mobile robots under curvature constraints[J].Control Engineering Practice,2011(19):45-53.
[7] Reinhardt Kotzé.Optimisation of pulsed ultrasonic velocimetry system and transducer technology for industrial applications[J]. Ultrasonics,2013(53):459-469.
[8] Concari C.Vibrationless alignment algorithm for incremental encoder based BLDC drives[J].Electric Power Systems Research,2013(95):225-231.
[9] 颜 伟.射频识别系统电磁辐射干扰特征快速分析与抑制[J].中国电机工程学报,2012,32(9):161-165.
[10] El Hajjaji A.Fuzzy path tracking control for automatic steering of vehicles[J].Roboticsand Autonomous Systems,2003(43):203-213.
Study on Detection Platform of Radiation Characteristics of Leaky Cable Based on Automatic Tracking
JIANG Bin
(Shanghai Electric Cable Research Institute,Shanghai200093,China)
To improve the level of automation of the radiation field from leaky cable,amultifunctional radiation field test platform with automatic navigation was developed.A automatic attitude correction algorithm was researched,and a client PC software was designed.Experimental data show that this detection system basicallymeet the vital requirements such as:high precision,anti-interference ability.Furthermore,during automaticmeasuring process,the offset of the navigation is less than 1 cm,the ranging error less than 0.4%.
leaky coaxial cable;posture correction;automatic tracking
TM248.3;TM206
A
1672-6901(2013)06-0032-04
2012-08-14
上海市科学技术委员会资助(课题编号为10XD1420800).
江 斌(1971-),男,教授级高工.
作者地址:上海市军工路1000号[200093].
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
汽车实用技术(2022年10期)2022-06-09
铁道通信信号(2020年8期)2020-02-06
汽车维修与保养(2019年3期)2019-06-19
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
车迷(2018年12期)2018-07-26
电子制作(2017年1期)2017-05-17
中国公共安全(2017年11期)2017-02-06
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
