提高双馈式风力发电机故障穿越能力的控制策略
2013-06-27 08:53:50高仕红张昌华耿东山李绍武
电力系统保护与控制 2013年5期
高仕红,张昌华,耿东山,李绍武
(湖北民族学院,湖北 恩施 445000)
0 引言
目前,兆瓦级双馈异步发电机(Double-Fed Induction Generator,DFIG)广泛用于变速风力发电系统,其特殊的入网方式及功率的调节手段,导致机组对电网扰动非常敏感[1]。特别因电网故障引起的DFIG机端电压跌落,导致DFIG转子绕组的过电流[2-3],如不采取适当措施加以限制,必引起转子侧变换器(Rotor-Side Converter,RSC)的热损坏。近几年,许多学者对如何提高双馈异步发电机故障穿越能力进行了大量的研究,主要研究成果可归纳为三类:(1)在转子侧或 Dc-link直流侧添加 Active crowbar[4-5],其对电网电压对称跌落有效,但在电网电压严重不对称跌落时,转子绕组中流过较大的负序电流,限制了DFIG的故障穿越能力;(2)在DFIG系统中安装额外的变换器或动态电阻器[6-7],其对各种电网电压跌落类型都适用,提高了DFIG的故障穿越能力,但增加了DFIG系统的费用和复杂性;(3)对传统控制策略的改进以及定子磁链去磁[8-9],是目前广大学者较热衷的控制策略,但在电网故障期间整个控制系统的瞬态性能较差,达不到DFIG故障穿越的要求。
针对传统控制策略瞬态响应速度慢和控制带宽窄的缺点,提出一个基于双滞环电流矢量控制器的故障穿越控制策略。所提出的双滞环电流矢量控制器具有非常快的瞬态响应速度和较宽的控制带宽,可满足电网对DFIG故障穿越的要求。
1 DFIG转子开路电压分析
依据电动机惯例,在定子坐标系下DFIG定、转子电压及磁链的动态矢量方程分别为[1-3]
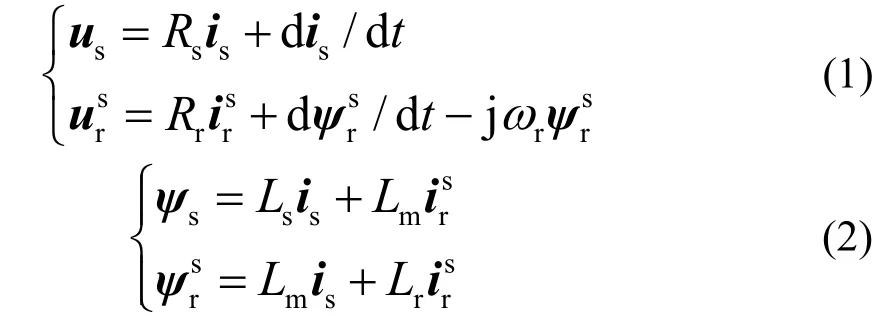
式中:ψiu,,分别为电压、电流、磁链矢量;LR,分别为电阻、电感;下标 mr,s, 分别为定子、转子及激磁参数;上标s为归算到定子侧的参数;rw为转子的电角速度。
对RSC来说转子电压是最重要的变量,消除式(1)、式(2)中的si及srψ,可得转子电压sru的表达式[5]为
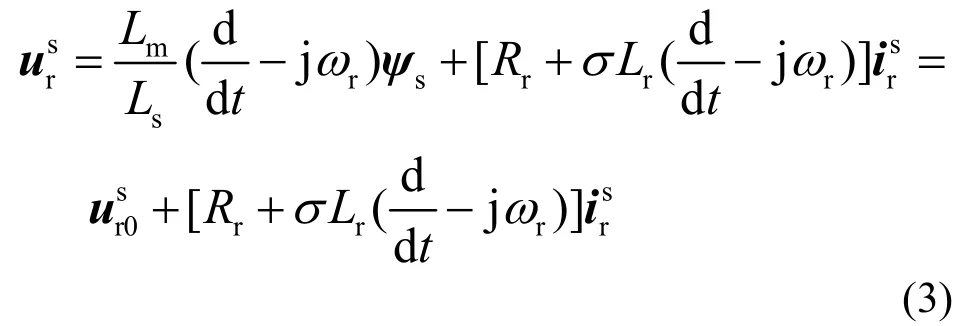
式中:sr0u为转子开路电压(由定子磁链产生),,是影响转子电流动态性能的扰动项;s为转子漏磁系数
1.1 正常运行时DFIG的转子开路电压
若忽略定子电阻,DFIG稳态运行时的定子磁链矢量为[5,7]

式中:sU为定子电压幅值;1w为同步电角速度。
因此,由式(3)、式(4)可得定子磁链产生的转子开路电压sr0u为

式中,s为DFIG的转差率,1r/1ww-=s。
由式(5)可知,DFIG在正常运行时,转子开路电压幅值较小,为定子电压幅值的倍。
1.2 机端电压对称跌落时DFIG的转子开路电压
电网发生三相短路故障是最严重的情况,在此只分析这类故障引起的DFIG机端电压跌落情况。假设0=t时电网发生三相短路故障,忽略暂态过程中转速的变化,转子绕组短路时DFIG的定子电压可近似表示为[5]对应机端对称短路的故障情况。

若忽略DFIG的定子电阻,其定子磁链近似等于定子电压的积分,定子磁链中由定子电压产生的稳态分量sfψ为
式中,D为电压跌落系数,

由磁链守恒原理可知,电压跌落瞬间DFIG定子磁链不能突变,因此磁链中必出现暂态直流分量其表达式为

式中,sT¢为定子暂态时间常数,其中sL¢为定子瞬态短路电感。
因此,电网三相短路使DFIG机端电压跌落后的定子磁链可表示为

由式(3)、式(9)可得定子磁链产生的转子开路电压sr0u为

由于定子电阻很小,可忽略s/1T¢。因此,式(10)可简化为

由式(11)可知,在机端电压跌落瞬间(0=t),转子开路电压则转子开路电压幅值约为正常时的2.3倍。在这样高的电压作用下,若电流调节器没有足够快的瞬态响应速度,在转子绕组中必将产生过电流。
图1为 2 MW 双馈异步发电机机端电压跌落1.0 p.u.及电压恢复时,PI电流调节器作用下转子电流的瞬态响应波形。由此可看出,在机端电压跌落和恢复期间,由于PI电流调节器较慢的瞬态响应速度和较窄的控制带宽,转子实际电流不能很好地跟踪参考电流。因此,在转子绕组中产生很大的振,若取3.0-=s,荡冲击电流。由此看来,如何提高RSC电流调节器的瞬态响应速度,使转子电流能较好地跟踪参考电流,可提高DFIG的故障穿越能力。
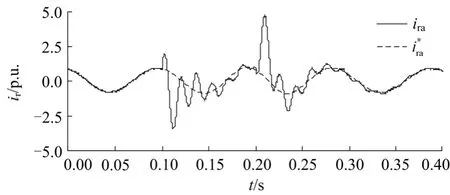
图1 转子电流的瞬态响应波形Fig. 1 Transient response waveforms of rotor current
2 滞环电流矢量控制的电流调节器
滞环电流矢量控制器最初用于有源电力滤波器,其表现出许多优越性能,如:非常快的瞬态响应速度、简单的硬件实施以及对系统参数变化的不敏感等[10-11]。
2.1 RSC输出的离散电压矢量
引入开关函数aS、bS、cS,RSC共有8种开关模式,由分析可知三相桥臂之间存在关联现象[10],RSC输出的各相电压取决于其三相桥臂的总体状态cbaSSS ,其开关状态及输出的对应电压见附录A表A1(以dcU 为基准)。
为了消除相间影响,引入空间矢量,即静止正交αβ-坐标。当a轴与a轴重合时,根据表A1可得RSC输出电压矢量为[11-12]

在式(12)中,如果考虑所有的开关状态组合,可得RSC输出的8个离散电压矢量为
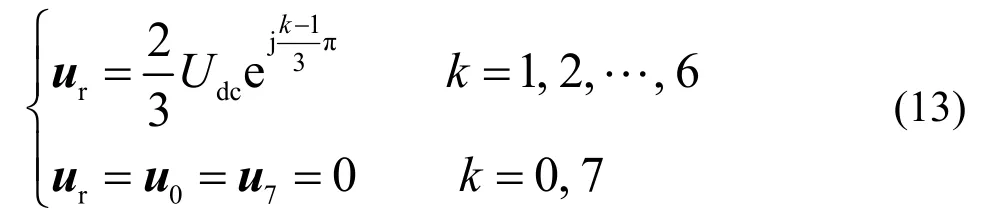
由式(13)可知,RSC输出的离散电压矢量由 6个非零电压矢量(1u~6u)和2个零电压矢量(70/uu )组成,其空间分布及参考电压区间如图2所示。
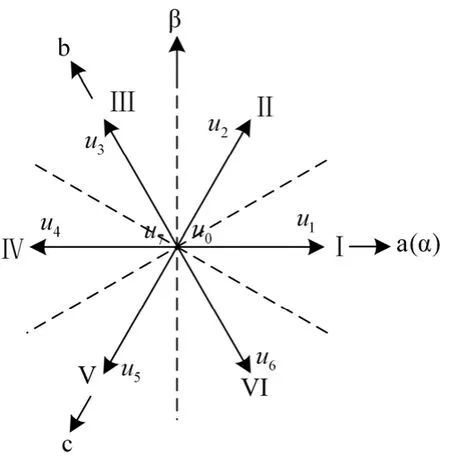
图2 离散电压矢量的空间分布Fig. 2 Space distribution of discrete voltage vectors
2.2 滞环电流矢量控制器的实施
在转子参考坐标中,由式(3)可得DFIG转子侧变换器的输出电压为

若定义电流误差,由式(14)可导出DFIG转子电流误差的矢量方程为

若忽略转子电阻,要使转子电流误差矢量为零,定义RSC输出的参考电压矢量为

由式(15)、式(16)可得简化的DFIG转子电流误差矢量方程为

由式(16)、式(17)可知,要完全消除转子侧变换器的电流跟踪误差,必须计算出参考电压矢量由于在工程实际中准确获得转子开路电压r0u和参考电流的导数 td/d*ri 难以实现,所以不可能准确计算出参考电压矢量*ru。实际上不需要计算参考电压矢量*ru,只要判断出参考电压矢量*ru所处的空间位置,适当地选择转子侧变换器输出的电压矢量,控制转子电流误差矢量riD的变化率td/driD,就可达到控制转子电流误差矢量riD。双滞环电流矢量控制器(Vector-Based Double Hysteresis Current Controller,VBDHCC)的原理图如图3所示。
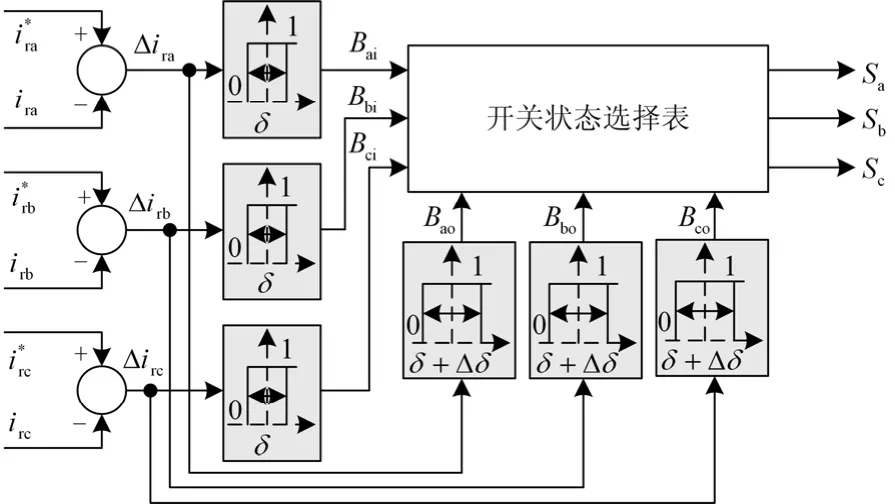
图3 滞环电流矢量控制器原理框图Fig. 3 Principle diagram of VBDHCC
在三相abc转子坐标中,采用两组滞环比较器:一组为滞环带宽为ddD+的辅滞环比较器,根据其输出的状态值coboaoBBB 来确定参考电压*ru所处的空间位置(如图2所示),由此确定出RSC输出的最优电压矢量集。另一组为滞环带宽为d的主滞环比较器,用于跟踪参考电流。根据其输出的状态值利用区间侦测器所确定的最优电压集,选择最优电压作为RSC的输出电压矢量。在控制过程中为了减少转子侧变换器的平均开关频率,并抑制输出电流的振荡,根据参考电压*ru所处的空间位置,主动引入零电压矢量(70/uu )。基于双滞环电流矢量控制采用的开关表如表1所示。
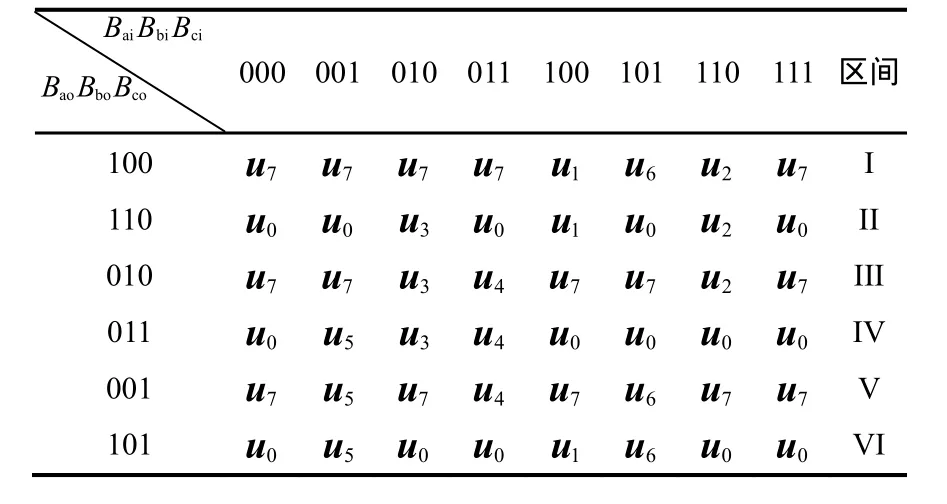
表1 滞环电流矢量控制的开关表Table 1 Switching table of VBDHCC
所提出的基于双滞环电流矢量控制器仅需测量转子电流的瞬态值,变换器的门信号直接用开关表产生,取消了传统矢量控制的调制单元,使其具有内在的电流限制属性和非常快的动态响应速度,由此在DFIG转子等效电路中转子侧变换器可看成一个可控电流源,对系统参数变化和电压扰动具有很强的鲁棒性。
2.3 两个控制器的过渡策略
所提出的DFIG故障穿越控制策略由两个不同的开关策略组成。正常运行时及电压跌落稳定后,PI电流调节器以最优稳态性能调节转子电流;电压跌落瞬态期间,DFIG转子绕组中将产生较大的冲击振荡电流,PI电流调节器的动态响应速度不足以维持转子瞬态电流的精确控制,电流跟踪误差将超过PI调节器的误差带宽,当触击到控制器的电流设计限值时,电压跌落监控单元激活双滞环电流矢量控制器,设其作用时间为50 ms(目的是考察双滞环电流矢量控制器作用的动态过程以及两个控制器之间切换的平稳性)。电压恢复过程中两个开关控制策略之间的转换原理同电压跌落期间一样。采用的开关策略如图4所示。

图4 开关策略Fig. 4 Switch strategy
由于双滞环电流矢量控制器具有非常快的瞬态响应,用可以忽略的响应时间,强迫转子电流保持在滞环带宽内。但从双滞环电流矢量控制器直接过渡到PI控制器是不可取的,由于PI电流调节器瞬态响应速度慢,直接过渡将在转子绕组中产生较大的电流振荡。因此,为了获得一个较稳定的过渡,过渡时利用双滞环电流矢量控制器的门信号,经过一阶低通滤波器得到RSC的输出电压矢量,重新初始化PI电流调节器。
3 故障穿越控制策略仿真研究
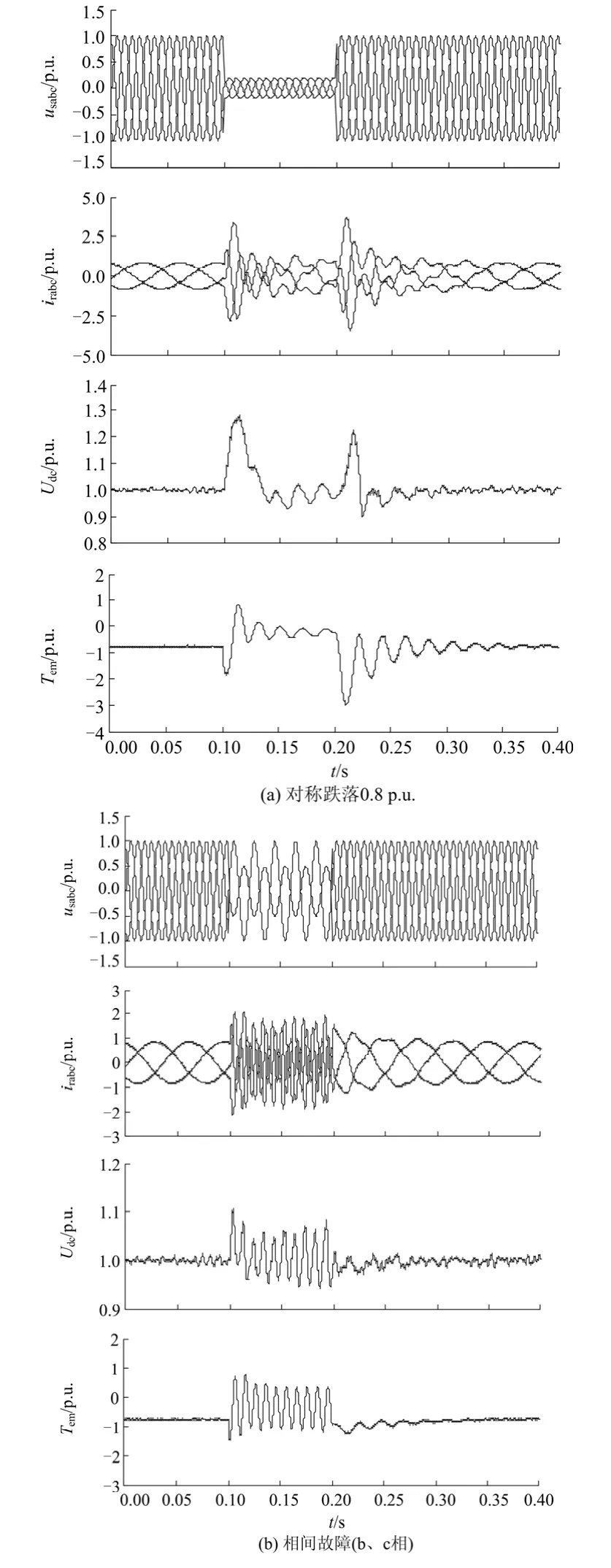
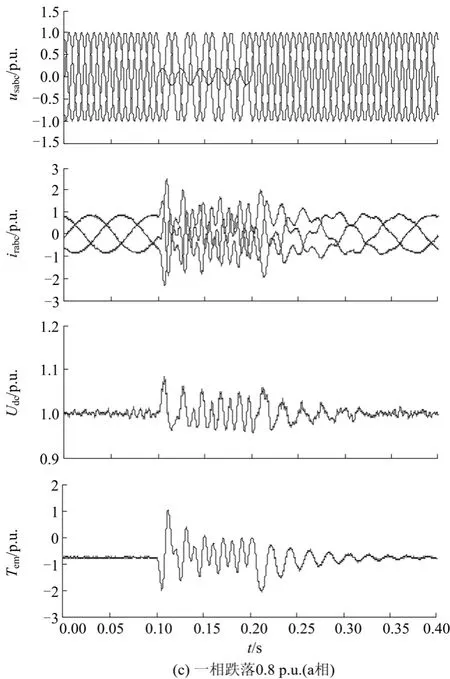
为了验证所提出的故障穿越控制策略对提高DFIG故障穿越能力的有效性,在 Matlab/Simulink中构建了仿真模型,2 MW双馈异步风力发电机参数见附录A表A2。仿真时为达到在不同的电流控制器之间的精确比较,保持RSC外部功率控制环的功率和转子速度为常数。所提出的DFIG故障穿越控制策略实施框图如图5所示。满载稳定运行。0.1 st= 时机端电压跌落,电压跌落持续时间为0.1 s。为评估所提出的故障穿越控制策略在机端电压深度跌落时的故障穿越能力,在此对机端电压三种跌落类型情况进行了仿真研究,转子电流rabci 、dc-link电压dcU 和电磁转矩
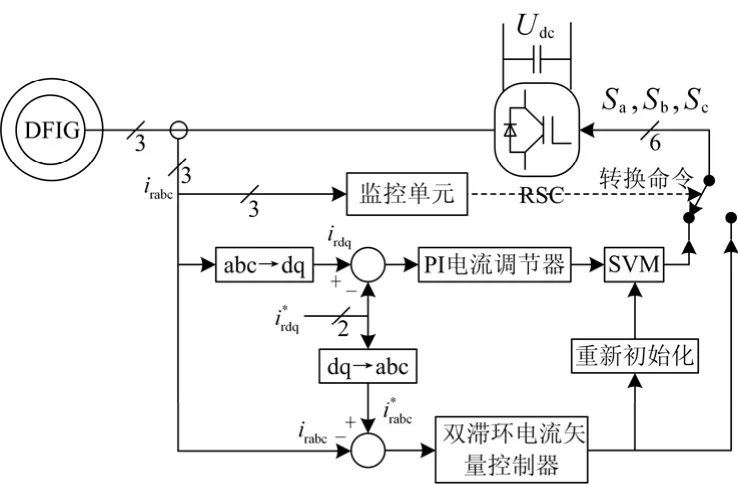
图5 故障穿越控制策略框图Fig. 5 Block diagram for fault ride-through control strategy
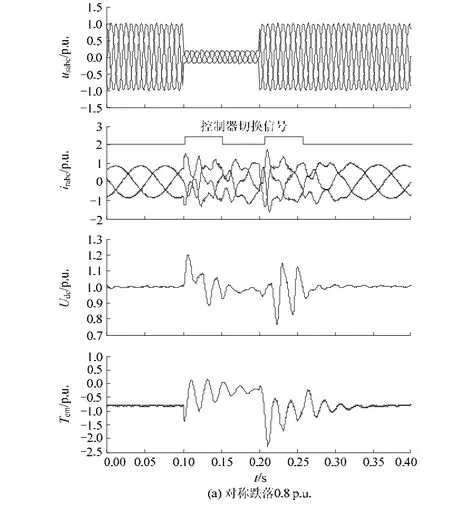
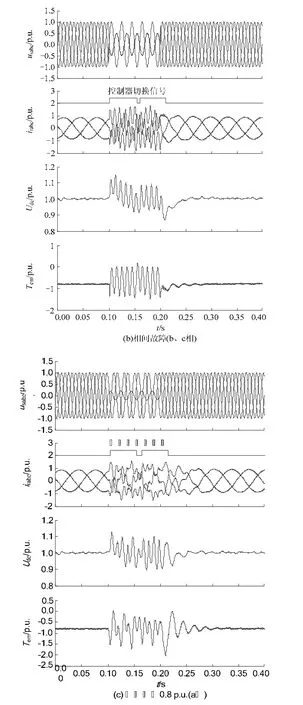
图6 所提出控制策略下的 rabci 、dcU 和 emTFig. 6 rabci ,dcU andemT for proposed control strategy
一般情况下,在转子侧变换器过调制运行下Dc-link的安全限制电压为额定电压的1.3倍,允许的转子安全限制电流为额定电流的2倍[10]。由图6及图A1的分析比较可知,在所提出的复合控制器作用下,DFIG能很好地满足电网要求的故障穿越要求,仿真分析比较结果如表2所示。在机端电压跌落至电压恢复期间,对称跌落时控制器的切换时刻分别为0.100 2 s、0.210 7 s;电网相间故障时控制器的切换时刻分别为0.100 1 s、0.160 5 s;一相跌落时控制器的切换时刻分别为0.100 4 s、0.164 9 s。

表2 仿真结果Table 2 Simulation results
4 结论
为深入理解 PI电流调节的双馈式风力发电机故障穿越能力弱的原因,详细分析了因电网三相短路导致DFIG机端电压对称跌落时转子开路电压的动态特性。由于PI电流调节器有限的瞬态响应速度和控制带宽,机端电压跌落时在转子端感应较高的开路电压是引起转子绕组过电流的本质原因。
为提高双馈异步风力发电机组的故障穿越能力,在此提出了基于双滞环电流矢量控制的故障穿越策略。电网故障及故障清除期间,应用两个不同的开关控制策略。在两个控制器切换时应用了重新初始化技术,使其达到一个稳定的过渡。为评估所提出的DFIG故障穿越策略,对电网对称和不对称短路故障引起的机端电压跌落进行了仿真研究,通过图6及图A1的对比分析,所提出的基于双滞环电流矢量控制器的故障穿越策略具有非常快的瞬态响应速度,有效地限制了转子中的振荡冲击电流和Dc-link直流电压的冲击值,使其保持在安全限度以下,提高了DFIG的故障穿越能力。
附录A
(1) RSC的开关状态及输出电压
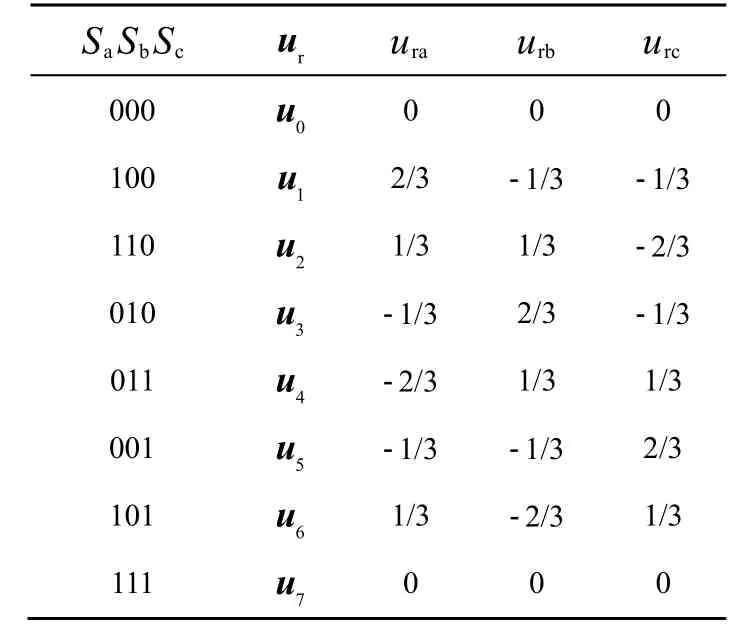
表A1 开关状态及RSC输出电压Table A1 Switching modes and output voltages of RSC
(2) 2 MW双馈式风力发电机主要参数
表A2 双馈异步风力发电机主要参数Table A2 DFIG main parameters
(3) PI电流调节器作用下的rabci 、dcU 和emT 的波形
图A1 PI控制下的 rabci 、dcU 和 emT 的波形图Fig. A1 rabci ,dcU andemT for PI control
[1] 贺益康, 周鹏. 变速恒频双馈异步风力发电系统低电压穿越技术综述[J]. 电工技术学报, 2009, 24(9):140-146.HE Yi-kang, ZHOU Peng. Overview of the low voltage ride-through technology for variable speed constant frequency doubly fed wind power generation systems[J].Transactions of China Electrotechnical Society, 2009,24(9): 140-146.
[2] 吕志强, 许国东. 兆瓦级双馈风电机组电网故障时的暂态分析[J]. 电力系统保护与控制, 2010, 38(23):112-116, 125.Lü Zhi-qiang, XU Guo-dong. Transient analysis of grid short circuit fault of megawatt doubly fed wind turbine[J].Power System Protection and Control, 2010, 38(23):112-116, 125.
[3] 杨之俊, 吴红斌, 丁明, 等. 故障时双馈风力发电系统的控制策略研究[J]. 电力系统保护与控制, 2010, 38(1):14-18, 36.YANG Zhi-jun, WU Hong-bin, DING Ming, et al.Control strategy of doubly-fed wind generation system for power grid fault[J]. Power System Protection and Control, 2010, 38(1): 14-18, 36.
[4] Erlich I, Wrede H, Feltes C. Dynamic behavior of DFIG-based wind turbine during grid faults[C] // Power Conversion Conference, Nagoya, Japan, 2007: 1195-1200.
[5] Lopez J, Guba E, Sanchis P, et al. Ride through of wind turbines with doubly fed induction generator under symmetrical voltage dips[J]. IEEE Trans on Industrial Electronics, 2009, 56(10): 4246-4254.
[6] Flannery P S, Venkataramanan G. A fault tolerant doubly fed induction generator wind turbine using a parallel grid side rectifier and series grid side converter[J]. IEEE Trans on Power Electron, 2008, 23(3): 1126-1135.
[7] Jin Yang, Fletcher J E, Reilly J O. A series-dynamicresistor-based converter protection scheme for doubly-fed induction generator during various fault conditions[J].IEEE Trans on Energy Conversion, 2010, 25(2): 422-432.
[8] 胡家兵, 孙丹, 贺益康, 等. 电网电压骤降故障下双馈风力发电机建模与控制[J]. 电力系统自动化, 2006,30(8): 21-26.HU Jia-bing, SUN Dan, HE Yi-kang, et al. Modeling and control of DFIG wind energy generation system under grid voltage dip[J]. Automation of Electric Power Systems, 2006, 30(8): 21-26.
[9] XIANG Da-wei, LI Ran. Control of a doubly fed induction generator in a wind turbine during grid fault ride-through[J].IEEE Trans on Energy Conversion, 2006, 21(3): 652-662.
[10] 叶小军, 曾江, 王克英, 等. 并联有源电力滤波器双滞环电流控制策略[J]. 电力系统保护与控制, 2009, 37(9):60-64.YE Xiao-jun, ZENG Jiang, WANG Ke-ying, et al.Double hysteresis current control strategy for shunt active power filter[J]. Power System Protection and Control,2009, 37(9): 60-64.
[11] 张晓, 孔令军, 孙华, 等. 三相三线制并联型有源电力滤波器的准滑模变结构控制[J]. 电力系统保护与控制,2011, 39(21): 40-44.ZHANG Xiao, KONG Ling-jun, SUN Hua, et al. The quasi-sliding mode control of the shunt active power filter in three-phase three-wire system[J]. Power System Protection and Control, 2011, 39(21): 40-44.
[12] 郭自勇, 周有庆, 刘宏超, 等. 一种基于电压空间矢量的有源滤波器滞环电流控制新方法[J]. 中国电机工程学报, 2007, 27(1): 112-117.GUO Zi-yong, ZHOU You-qing, LIU Hong-chao, et al. A novel hysteresis current control method for active power filter based on voltage space vector[J]. Proceedings of the CSEE, 2007, 27(1): 112-117.
猜你喜欢
防爆电机(2021年1期)2021-03-29 03:02:46
防爆电机(2020年3期)2020-11-06 09:07:36
测控技术(2018年2期)2018-12-09 09:00:52
水电站机电技术(2017年9期)2017-09-26 03:34:52
微特电机(2016年3期)2016-11-29 09:43:45
中国光学(2015年5期)2015-12-09 09:00:39
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:07
空间控制技术与应用(2015年1期)2015-06-05 12:22:16
科技创新导报(2015年32期)2015-04-12 09:22:46
电机与控制应用(2015年10期)2015-03-01 03:50:16