一类不确定时滞系统的H∞保代价控制
2013-06-23 09:41程东权桂敬玲
电子设计工程 2013年11期
程东权,李 俨,桂敬玲
(西北工业大学 自动化学院,陕西 西安 710129)
在设计控制系统时往往需要考虑系统的鲁棒稳定和鲁棒性能,保代价控制律(Guaranteed Cost Control Law)不仅能保证不确定闭环系统的鲁棒渐进稳定还能使得不确定闭环系统具有一定的鲁棒性能,是一种可行的鲁棒控制器设计方法[1-4]。
文中主要针对不确定时滞系统的鲁棒保代价问题进行分析,考虑状态反馈控制律的设计问题。基于线性矩阵不等式处理方法[5-6],给出满足特定条件的保性能控制律的存在条件及设计方法。
1 问题描述
考虑如下状态方程描述的线性不确定时滞系统:

其中,x(t)∈Rn为系统状态,u(t)∈Rk为系统控制输入,z(t)∈Rp为被控输出,ω(t)∈Rq为外部干扰,有ω(t)∈L2[0,∞]。为向量值连续的初始值。d为系统延时时间。约定不确定矩阵ΔA、ΔAd、ΔB且具有如下匹配形式

其中G、Ha、Hd、Hb为适当维数的实矩阵,E为未知的时变矩阵,满足ETE≤I。
取性能指标函数:

其中,Q、R为适当维数的对称正定矩阵。
采用状态反馈:u(t)=Kx(t),考虑执行器可能发生故障,如断电,失效等[7-8],定义ρ=diag(ρ1,ρ2,…,ρk),其中ρi表示第i个执行器的故障情况,记ρi=0,断电;ρi∈(0,1),失效;ρi=1,正常。则有

则相应的闭环系统记为:

则性能指标函数

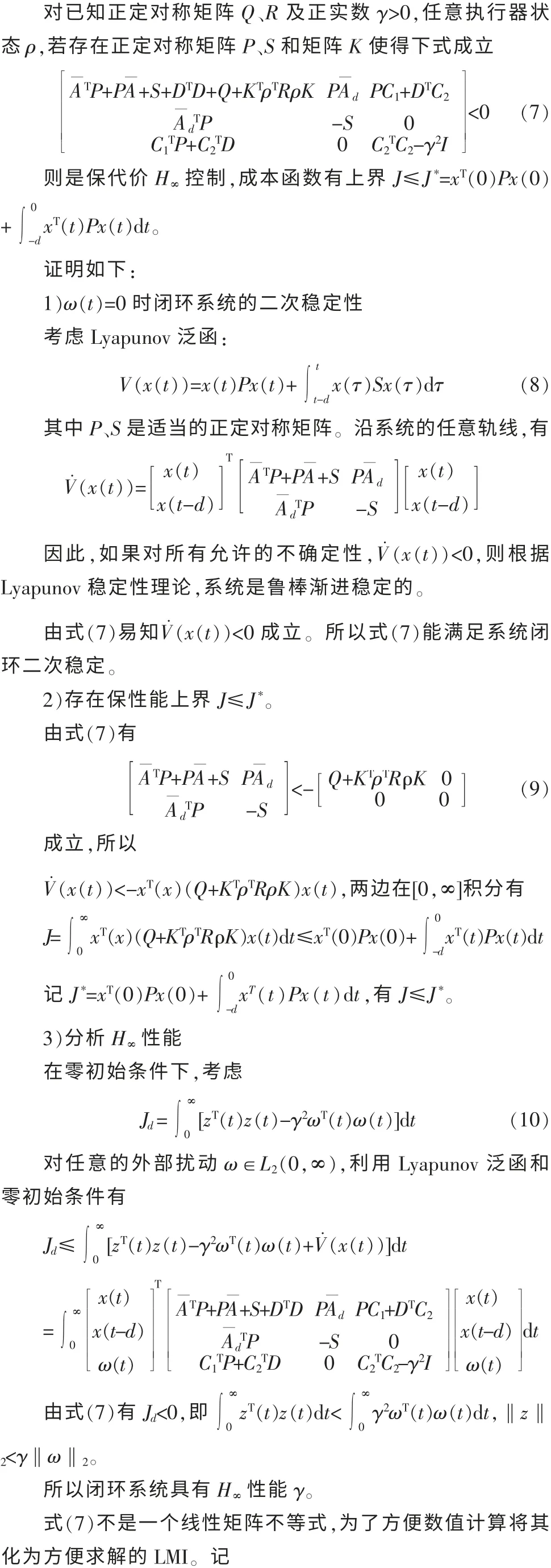
2 H∞保代价控制器设计
考虑闭环系统(5)具有:1)H∞性能;2)性能指标J有上界。给出使系统满足上述要求的状态反馈控制器存在的条件:
3 数值例子
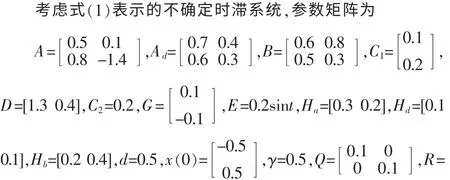

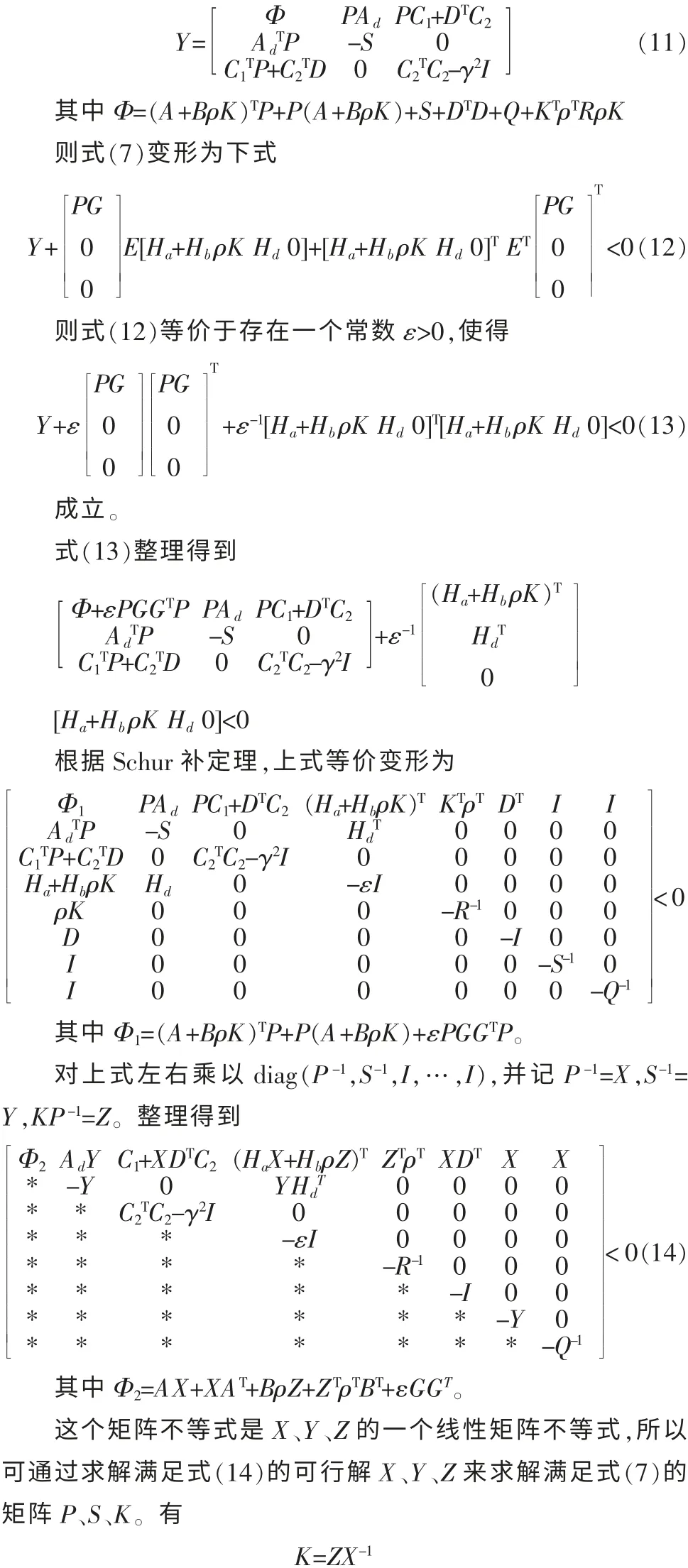
通过求解式(15)表示的凸优化问题确定满足式(7)的H∞保代价控制器。

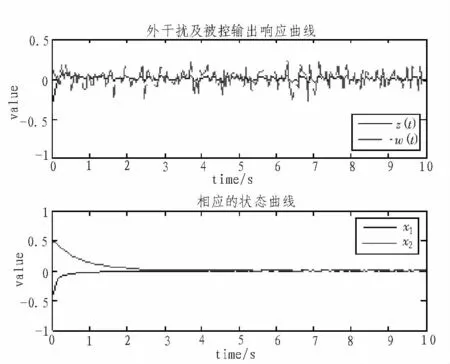
图1 干扰条件下系统状态与输出曲线Fig.1 Responds of system states&outputs with disturb
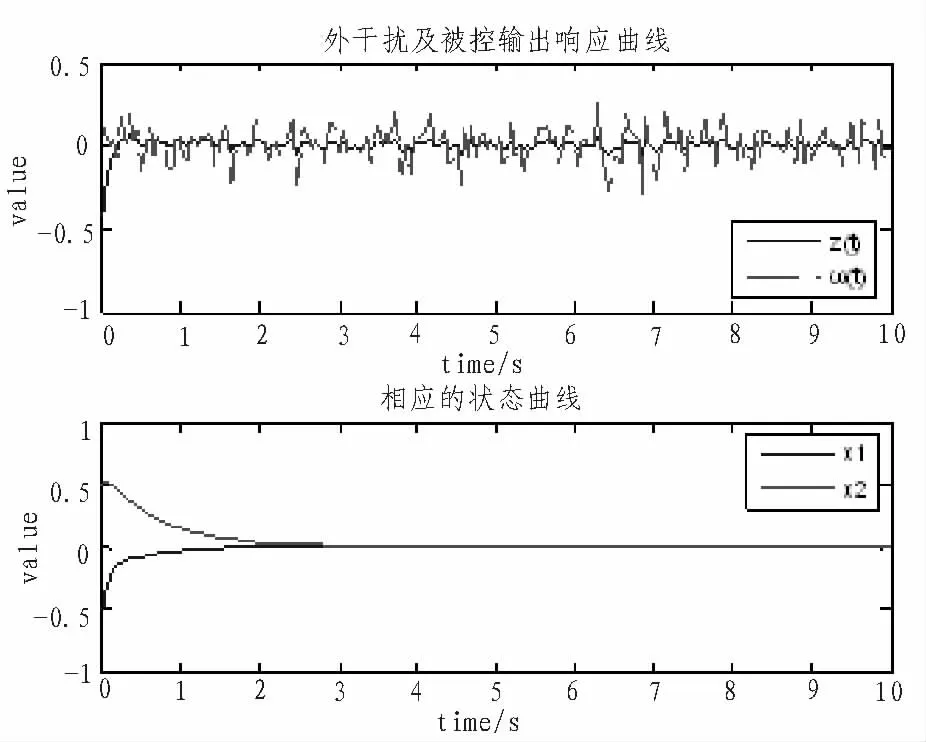
图2 干扰条件下系统状态与输出曲线Fig.2 Responds of system states&outputs with disturb
针对不同的执行器故障情况,设计H∞的鲁棒保代价控制律都能保证闭环系统的稳定性,且使系统具有一定的干扰抑制能力。
4 结 论
研究了一类参数不确定时滞系统的H∞保代价控制问题,通过Lyapunov稳定性理论分析推导出使系统H∞保代价控制器存在的充分条件,并给出了利于计算的相应LMI形式。设计的控制器能够保证系统的鲁棒容错性,且使系统存在保成本上界也具有指定H∞范数的干扰抑制能力。最后给出的数值例子说明此方法的有效性。
[1]贾英民.鲁棒H∞控制[M].北京:科学出版社,2007.
[2]俞立.鲁棒控制-线性矩阵不等式处理方法[M].北京:清华大学出版社,2002.
[3]YANG Guang-hong.Reliable H∞control of linear systems with adaptive mechanism[J].IEEE Transactions on Automatic Control,2010,55(1):242-247.
[4]Adams R J,Buffington J M,Sparks A G,et al.Robust multivariable flight control[C]//London,U.K.:Spring-Verlag,1994.
[5]王德进.线性不确定时滞系统鲁棒保代价/H∞混合控制[J].黑龙江大学自然科学学报,2003,20(4):32-34.WANG De-jin.Robust guaranteed cost control/H∞control for linear uncertain rime-delay systems[J].Natural Science Journal of Heilongjiang University,2003,20(4):32-34.
[6]滕青芳.不确定时滞系统的保代价H∞可靠控制[J].计算机工程与应用,2010,46(12):245-248.TENGQing-fang.Guaranteed cost H∞control for linear uncertain time-delay systems[J].Computer Engineering and Applications,2010,46(12):245-248.
[7]Yang G H,Wang J L,Soh Y C.Reliable controller design for linear systems with sensor failures[J].Conference on Decision&Control,1998.
[8]JIN Xiao-zheng.Robust adaptive faul-tolerant compensation controlwith actuator failures and bounded disturbances[J].Acta Automatica Sinica,2009,3(35):305-309.
猜你喜欢
数学物理学报(2020年5期)2020-11-26
自动化学报(2019年6期)2019-07-23
北方工业大学学报(2019年5期)2019-03-30
测控技术(2018年12期)2018-11-25
海峡姐妹(2017年12期)2018-01-31
制造技术与机床(2017年9期)2017-11-27
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
中学生(2015年12期)2015-03-01
应用数学与计算数学学报(2014年3期)2014-09-26