
汽车倒车雷达系统的设计
2013-06-23 09:47:40汪晓红
电子设计工程 2013年17期
汪晓红
(陕西工业职业技术学院 电气工程学院,陕西 咸阳 712000)
倒车雷达系统需要对驾驶员盲区内的障碍物进行探测,为驾驶员提供倒车警告和辅助泊车功能[1]。本设计的原理是利用超声波探测倒车路径上或附近存在的任何障碍物,并根据盲区内障碍物的距离和方向及时发出危险警报和语音提示。
1 倒车雷达系统的设计原理
1.1 倒车雷达系统的硬件组成
系统硬件由STC12C5A60S2单片机最小系统、GM3101超声波测距电路、ISD1730语音报警电路、DS18B20测温电路及显示电路组成,如图1所示。
1.2 倒车雷达系统的工作原理
超声波测距电路控制安装在车辆尾部三个方位(左右两侧各1个,后侧2个)共四路超声波探头发射和接收频率为40 kHz的超声波[2],根据发送和接收的时间差Δt计算不同方位障碍物的距离d=s×Δt(s为声速),并根据不同方位障碍物的距离确定危险等级(安全、警告、危险、停车),将不同方位障碍物距离的危险等级、最近障碍物的方位、最近障碍物的距离等信息数据包发送给STC12C5A60S2单片机。
为避免倒车过程中车辆周边运动物体影响报警信号的准确性,STC12C5A60S2单片机对连续五次所接收到数据进行比对,以最终确定不同方位障碍物距离的危险等级和最近障碍物的方位。对于衡量系统测量精度和测量误差的关键参数--最近障碍物的距离,单片机通过中值滤波算法以减小测量误差,通过温度补偿算法实时修正环境温度变化所造成的声速变化对于测量结果的影响以提高测量精度。最后,单片机控制显示器显示最近障碍物的方位和最近障碍物的距离,控制语音处理电路播放对应危险等级的语音提示。
2 倒车雷达系统的硬件设计
2.1 超声波测距电路设计
GM3101是专用于倒车雷达的超声波测距芯片,可驱动四路超声波探头进行测距,并将检测到的各探头到障碍物距离的危险等级、最近障碍物的方位及最近障碍物距离等信息以双线差分串行方式输出[3]。其最大测距范围是0~3.15 m,测量精度0.05 m,工作周期80 ms,输出信号采用标准异步传输格式(波特率4 800 bps、电平5 V)。
图2 所示为超声波探头驱动电路,四路超声波探头在GM3101的驱动下巡回发射超声波并将获取到的对应方位障碍物的反射波回送给测距芯片GM3101。由图3所示的超声波测距电路完成最近障碍物距离计算、最近障碍物确定和方位危险等级判断。图中DOUT+、DOUT-为GM3101的差分串行输出端,MODE为GM3101的工作模式选择端,与STC12C5A60S2单片机连接实现数据传输和模式控制,F9COM、COUT为测试端,用于GM3101的性能测试。

图2 超声波探头驱动电路原理图Fig.2 Schematic diagram of ultrasonic probe driving circuit
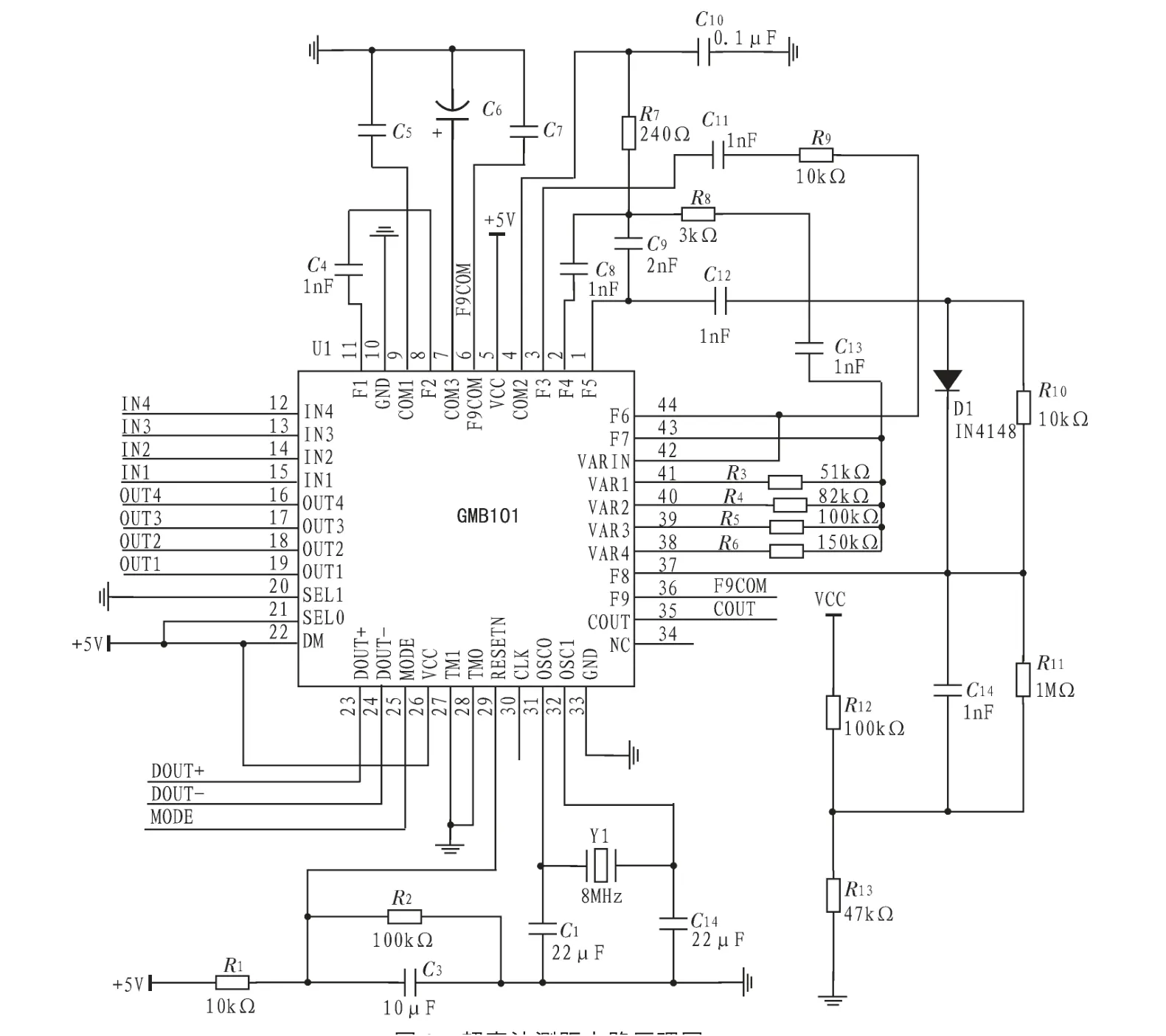
图3 超声波测距电路原理图Fig.3 Schematic diagram of ultrasonic distance measurement circuit
2.2 其他外围电路设计
除超声波测距电路外,系统还具有语音报警电路、温度测量电路和显示电路等外围电路。语音报警电路采用优质的的语音录放芯片ISD1730,可通过SPI接口与STC12C5A60S2单片机连接,外接扬声器实现多种语音录放功能控制,处理多达255段语音信息[4]。图4所示为语音报警电路原理图。
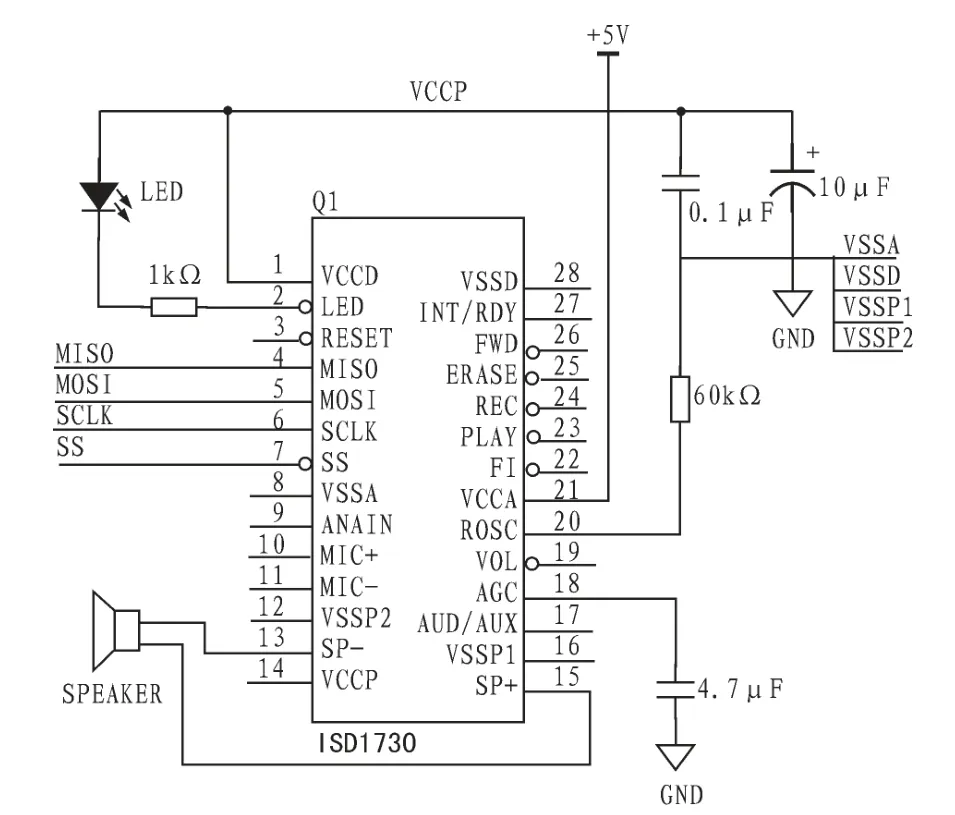
图4 语音报警电路原理图Fig.4 Schematic diagram of voice alarming circuit
温度测量电路采用单总线数字温度传感器DS18B20实现测温[5],显示电路采用LCD1602字符型液晶显示器显示最近障碍物的距离值,电路如图5所示。
2.3 主控单片机STC12C5A60S2接口设计
系统使用STC12C5A60S2单片机作为主控器件,指令代码与传统8051单片机完全兼容,但处理速度是传统8051单片机的8~12倍,具有44根I/O口线,片内集成60KB 的Flash ROM、1280B的RAM以及SPI、UART、PWM和ADC等多种接口,易于系统集成。图5为STC12C5A60S2单片机与各外围电路的的接口设计图。
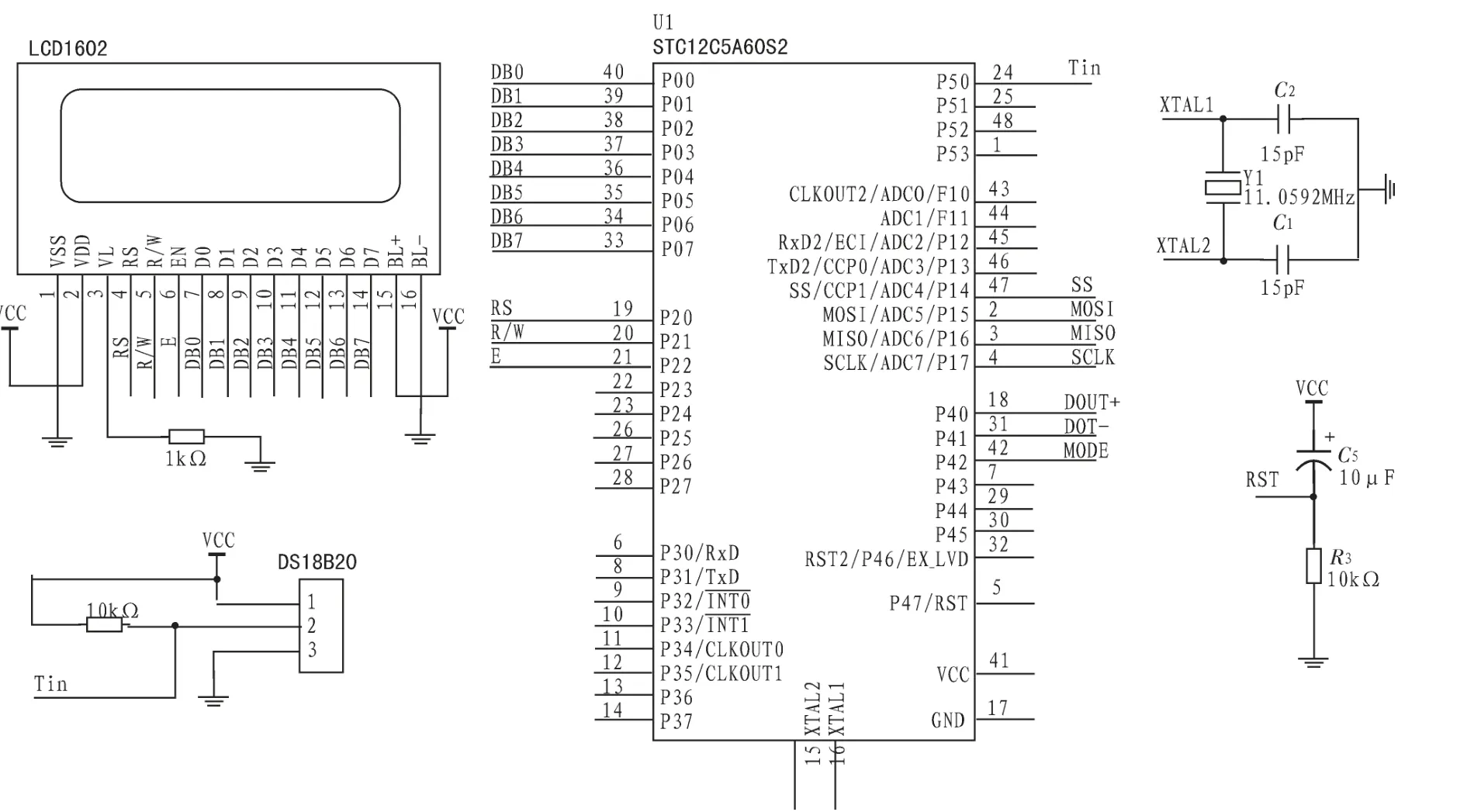
图5 单片机STC12C5A60S2接口设计Fig.5 Schematic diagram of SCM STC12C5A60S2 interface circuit
3 倒车雷达系统的软件设计
3.1 算法设计
由于倒车过程中周围运动物体对于测距结果存在干扰可能导致报警信号的准确性下降,而声波在空气中的传播速度受到环境温度的影响也会测距结果的精度降低。为了抑制此类噪声的影响,软件算法中采用了中值滤波和温度补偿进行优化。具体措施是先将GM3101超声波测距芯片连续5次的测距结果求平均值

考虑到GM3101超声波测距芯片使用的声速值为v′=340 m/s,而声速v与温度t的关系为v=331.5+0.607t。因此需引入测温传感器DS18B20的测量值t进行声速修正,以最终确定修正后的测距结果S。

3.2 主流程设计
系统的软件设计采用模块化程序设计的方法,主要包括系统初始化模块、测距信息接收模块、温度测量模块、滤波与温度补偿模块、语音报警输出模块及距离显示输出模块,系统主流程如图6所示。

图6 系统主流程图Fig.6 Flow chart of the main program
4 结束语
基于在STC12C5A60S2单片机[7-8]的倒车雷达系统经多次试验改进,已经制作成功。该系统最大测量距离为3.15 m,测量精度为0.05 m,语音报警准确,工作稳定可靠,完全满足车辆倒车的功能要求。
[1]吴琼,封维忠,马文杰.汽车倒车雷达系统的设计与实现[J].现代电子技术,2009(9):191-194.WU Qiong,FENG Wei-zhong,MA Wen-jie.Design and implementation of the automobile reversing radar systerm[J].Modern Electronics Technique,2009(9):191-194.
[2]吴斌方,刘民,熊海滨.超声波测距传感器的研制[J].湖北工学院学报,2004(6):26-27.WU Bin-fang,LIU Min,XIONG Hai-bin.Design of supersonic wave distance measuring sensor[J].Journal of Hubei Polytechnic University,2004(6):26-27.
[3]蔡杰.GM8125和GM3101在车辆行驶记录仪中的应用[J].电子产品世界,2006(11):126-128.CAI Jie.The application of GM8125 and GM3101 in automotive recording systerm[J].Electronic Engineering&Product World,2006(11):126-128.
[4]戴国强,郭高荣,侯霞.基于ISD1700系列语音录放电路的实现[J].福建电脑,2012(2):146-147.DAI Guo-qiang,GUO Gao-rong,HOU Xia.Voice playback circuit based on ISD1700[J].Fujian Computer,2012(2):146-147.
[5]吉武庆,耿凡娜.基于PROTEUS的单片机测温系统仿真设计[J].科技信息,2008(16):395-396.JI Wu-qing,GENG Fan-na.The simulation design of MCU temperature measurement systerm based on PROTEUS[J].Scienee&Technology Information,2008(16):395-396.
[6]邱绍峰.凌阳十六位单片机原理及应用[M].西安:西安电子科技大学出版社,2011.
[7]杨舰,纪绿彬.基于STC12C5A60S2的U盘音频播放器设计[J].电子科技,2011,24(10):24-27.YANG Jian,JI Lv-bin.Design of audio player for USB flash disk based on STC12C5A60S2[J].Electronic Science and Technology,2011,24(10):24-27.
[8]陈卫峰,邓小颖,吕天文.新型电网电压监测仪的组成和驱动程序设计[J].现代电子技术,2010,33(3):131-133.CHEN Wei-feng,DENG Xiao-ying,LV Tian-wen.Design and implement of new voltage monitoring instrument based on STCl2C5A60S2[J].Modern Electronics Technique,2010,33(3):131-133.
猜你喜欢
幼儿园(2021年12期)2021-11-06 05:10:20
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
科学(2020年3期)2020-01-06 04:02:51
电子制作(2017年7期)2017-06-05 09:36:13
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:00
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
太空探索(2014年1期)2014-07-10 13:41:50
