
汽车前照灯系统的设计
2013-06-21 09:03:56关秀丽雷艳敏
长春大学学报 2013年8期
关秀丽,雷艳敏
(长春大学 电子信息工程学院,长春 130022)
0 引言
随着汽车电子技术的发展,人们对汽车的安全、舒适和人性化要求越来越高。而传统的前照灯系统存在照明光光型单一,近距离上的照明效果不好,弯道照明有暗区等诸多问题,严重影响了行车的安全。基于上述这些问题,就使得研制一种灵活的智能前照灯系统迫在眉睫。
汽车前照灯系统通过综合利用各种传感器技术,采集路面上的各种信息,以便感知驾驶员操作。根据车辆行驶状态、速度变化以及天气环境等因素,自动控制前照灯进行实时动态的光照调节,实现前照灯自适应照明。从而提供最佳道路照明效果,保障行车安全。
1 工作原理
汽车智能前照灯调整系统如图1所示[5]。系统的工作原理是:由传感器感知路面行驶的变化,将信号通过处理电路传递给电控单元,通过调用内部控制算法,发出相应的指令控制前照灯的转角及水平照射位置,实现实时动态的光照照明。
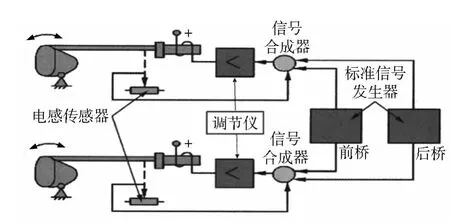
图1 汽车前照灯自动调整系统
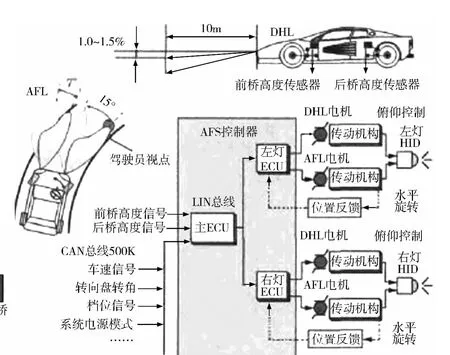
图2 AFS系统功能设计示意图
图2 是系统的功能设计示意图[1]。系统采用总线控制,用于实现汽车内部控制系统与外围电路间的数据通信,以便达到整车信息的共享。显然该系统是一个多输入多输出复杂的控制系统。
2 控制算法
控制算法是整个系统的核心,AFS系统的作用对象是近光灯。如果有危险情况的发生,驾驶者需要用一定的时间作出判断以躲避危险并同时对汽车制动[3]。图3给出了AFS系统转弯水平偏转模型。

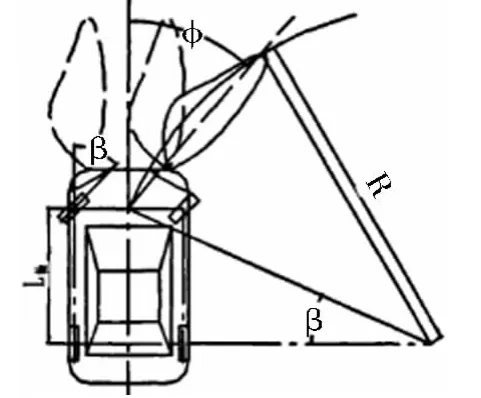
图3 转弯水平方向偏转模型
方向盘和转角的关系:β=Ka
式中:v是车速,t是反应时间,s是制动距离,β是车轮转角,L轴是汽车的轴距。

当汽车进入弯道左转时,左侧前照灯按规律转向,右侧前照灯照射方向保持不变;当作用在方向盘上的扭力或者汽车行驶速度加大时,左右前照灯均可以以极快的响应速度到达预期规定的位置。
系统控制算法集成在AFS主控制器的芯片上,其主程序流程如图4所示。

图4 系统主程序流程图
3 结语
汽车前照灯系统作为汽车照明的一大技术革新,极大程度地满足了人们对行车安全驾驶和舒适化的要求。可以预见,随着汽车工业的发展,其功能将会越来越完善,其影响也将会越来越深远。
[1]房旭,姚勇,刘军,等.智能汽车前照灯照明系统(AFS)研究[J].天津汽车,2006(4):17-20.
[2]钱向名.车用自适应前照灯系统设计与研究[J].机电工程,2010(7):104-107.
[3]朱维涛.汽车前照灯系统光学设计方法研究[J].仪器仪表学报,2005,26(9):971-975.
[4]Korm anyos CM.HID system with adaptive vertical aim control[J].SAE transactions,1998,107(6):12-17.
[5]方英兰,朱向冰.自适应前照灯的功能与实现[J].灯与照明,2010(2):14-18.
[6]兰琳,陈钊.汽车前照灯智能控制系统的设计[J].拖拉机与农用运输,2009(1):115-116.
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20 06:11:52
汽车维护与修理(2018年7期)2018-10-13 06:03:48
制造技术与机床(2017年6期)2018-01-19 02:41:07
解放军健康(2017年5期)2017-08-01 06:27:42
汽车维护与修理(2016年4期)2016-11-26 06:29:50
知识经济·中国直销(2016年2期)2016-11-07 09:33:42
电源技术(2015年9期)2015-06-05 09:36:06
交通建设与管理(2015年13期)2015-03-20 15:18:48
汽车零部件(2014年7期)2014-06-23 16:26:07
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
