基于拟T-S模糊模型的网络化控制系统的卡尔曼滤波器设计*
2013-06-19 05:14红方华京任先平
武汉理工大学学报(交通科学与工程版) 2013年2期
章 红方华京 任先平
(华中科技大学控制系1) 武汉 430074) (江汉大学物理与信息工程学院2) 武汉 430056)
0 引 言
考虑具有噪声的线性定常离散系统用以下状态空间模型来描述[1-2]:
式中:x(k)∈Rn×1,u(k)∈Rm×1,y(k)∈Rl×1,z(k)∈Rq×1分别为系统状态向量、输入向量、传感器测量输出及系统实际输出向量;w(k+1)和v(k)分别表示系统扰动和测量噪声,它们是不相关的、具有零均值的高斯白噪声,在采样间隔内,w(k)和v(k)均为常值,其统计特性为
A∈Rn×n,B∈Rn×m,C∈Rl×n和Cr∈Rq×n分别为系统的状态矩阵、输入矩阵、传感器测量矩和输出矩阵,Eww(k)∈Rn×n,Evv(k)∈Rl×l分别为w(k)和v(k)的方差矩阵.
状态向量的初始值x(0)的统计特性给定为
1 NCS系统模型
利用网络时延作为模糊变量,时延出现的概率作为隶属度函数,构造基于T-S模糊模型的拟T-S模型(quasi T-S fuzzy model,QTS)[3-6].
根据时延的特性,将线性控制系统分为n+1个子系统,前面的n 个子系统是没有数据包丢失的情况,当时延τ>nTs时,假设出现丢包情况.
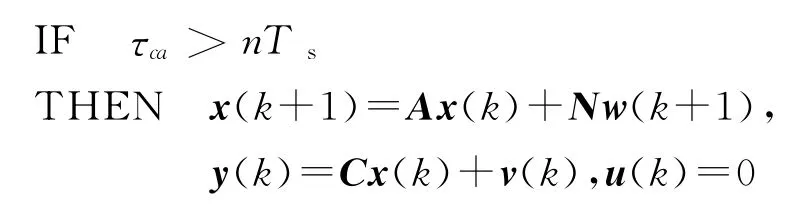
当时延τ>nTs时,根据丢失的信息不同分别讨论:(1)若τca>nTs,则控制器传递给执行机构的控制信息丢失,此时相当于一个开环系统;(2)若τsc>nTs,则传感器传递给控制器的状态信息丢失,可以利用卡尔曼滤波器进行状态滤波和预估控制.
因此,构造n+1个模糊子系统的系统模型,其中第r个模糊子系统分为2部分构造:
第一部分
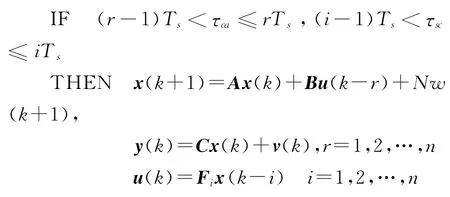
第二部分
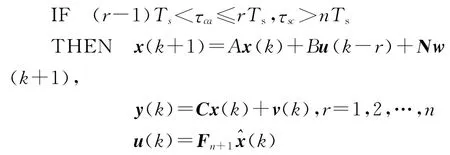
第n+1个子系统的模型为
经模糊融合后得到NCS的模型为
2 基于QTS模型的NCS状态估计器的设计
由于每一个子系统的系统矩阵、输入矩阵和输出矩阵都是相同,所以在每个采样时刻,子系统的增益矩阵、预测误差方差阵和滤波方差阵具有相同的形式,针对NCS系统出现丢包的情况,构造每个子系统的卡尔曼滤波器THEN

式中:Kr(k+1)为待优化的增益矩阵算子.
3)增益矩阵
4)预测误差方差阵

5)滤波误差方差阵
即:

4)预测误差方差阵 E(n+1)ee(k+1|k)=AE(n+1)ee(k)AT+NEww(k+1)NT
5)滤波误差方差阵
则经过模糊融合后系统的全局状态估计:
1)状态预估方程
2)估计校正方程

3 模糊卡尔曼滤波器的数字仿真
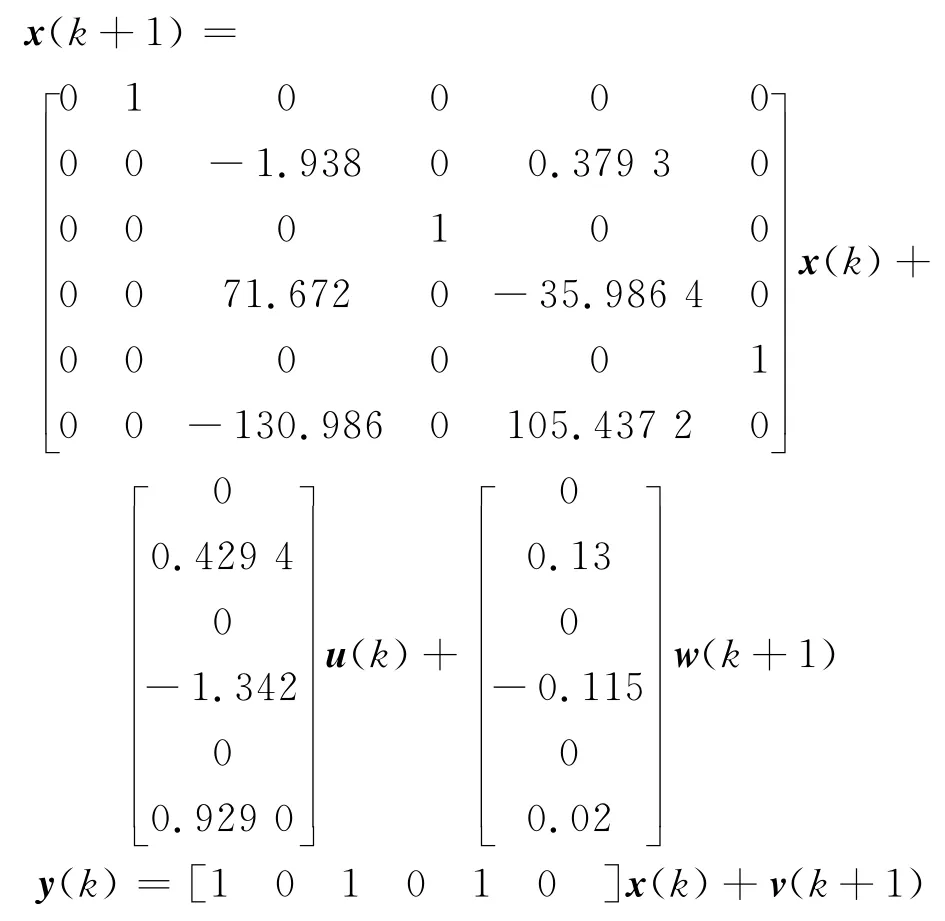
以一个二级倒立摆系统为例进行分析.倒立摆系统的状态空间描述如下.
根据二级倒立摆系统运动的特点,极点配置应满足鞍点特性,所以取满足要求的极点为

假设网络控制系统的采样周期T=0.05s,系统的时延分布特性满足本文开始的假设,当延迟时间τ>0.15s时,认为系统出现丢包.系统时延和丢包出现的概率分布满足μ={0.3,0.5,0.1,0.1}.其中:μ1,μ2,μ3 为系统传输出现不同时延的概率,即n=3,μ4 为系统传输出现丢包的概率.由于,各个子系统的系统矩阵、输入矩阵和连接矩阵都没有发生变化,所以根据极点配置的要求取状态反馈矩阵

利用MATLAB仿真得到滤波器与系统输出之间的波形关系,见图1.
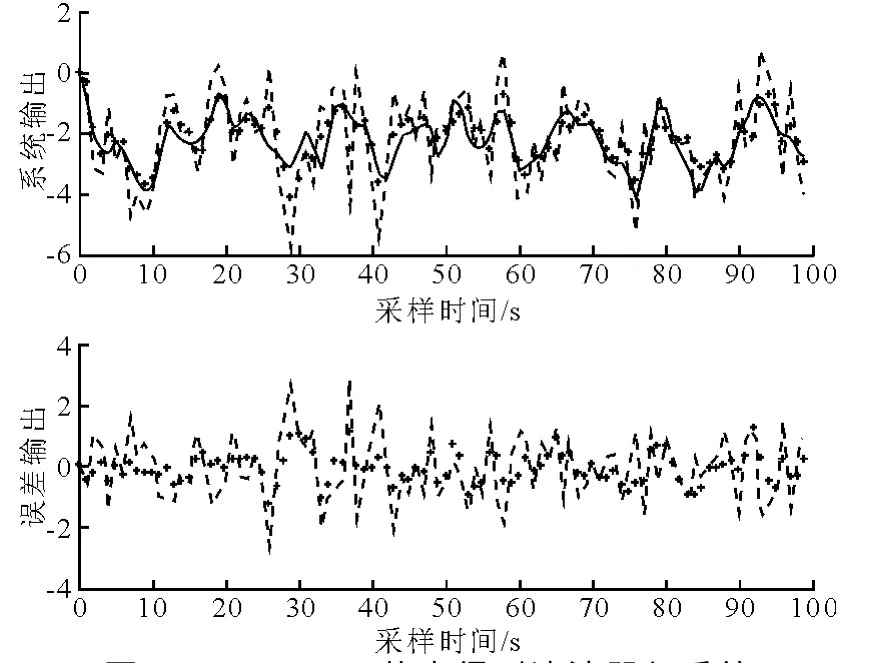
图1 MATLAB仿真得到滤波器与系统输出之间的波形关系图
在输出波形中,实线给出的是系统期望输出的波形,虚线表示的是系统受到噪声影响情况下的输出波形,用点点表示的波形经过滤波器的输出波形,可见所设计的卡尔曼滤波器可以滤去噪声的影响,更接近系统的实际输出.通过第二组的误差波形,可以更清楚地看出滤波特性,虚线反映的是实际输出和理想输出之间的误差,点线反映的是滤波器输出与理想输出之间的误差,很显然滤波器可以很好地抑制噪声对系统的干扰.
通过上述基于QTS模型构建的NCS系统卡尔曼滤波器可以很好地实现对噪声的抑制作用,以此为基础可以进一步展开对NCS系统故障诊断和容错技术的研究.亦可以将滤波器的应用推广到更广泛的领域.
[1]王志贤.最优状态估计与系统辨识[M].西安:西北工业大学出版社,2004.
[2]张贤达.现代信号处理[M].2版.北京:清华大学出版社,2002.
[3]FANG Huajing,ZHANG Hong,FANG Yiwei,et al.Quasi T-S fuzzy models and stable controllers for networked control systems[C]∥Proceedings of the World Congress on Intelligent Control and Automation,Dalian:IEEE,2006:220-223.
[4]FANG Huajing,YANG Fang,ZHENG Ying,et al.Fuzzy modeling and fault detection for networked control systems[C]∥6th IFAC Symposium on Fault Detection, Supervision and Safty of Technical Processes,Beijing:IEEE,2006:1091-1096.
[5]章 红,方华京,任先平.基于拟T-S模糊模型的网络化控制系统稳定性分析[J].武汉理工大学学报:交通工程版,2012,36(1):203-206,210.
[6]章 红,方华京,任先平.基于拟T-S模糊模型的网络化控制系统鲁棒性分析[J].华中科技大学学报:自然科学版,2011,39(8):108-113.
猜你喜欢
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
电子制作(2019年23期)2019-02-23
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
初中生世界·九年级(2017年10期)2017-11-08
系统工程与电子技术(2016年7期)2016-08-21
现代防御技术(2016年1期)2016-06-01
电测与仪表(2016年21期)2016-04-11