
基于HLA的潜艇作战训练系统设计
2013-06-13 11:33边聚广
微处理机 2013年2期
边聚广
(江苏自动化研究所,连云港222006)
1 引言
现代潜艇作战系统一般都有训练和战斗两种工作模式,其中训练模式主要是通过模拟各种战场态势和各种软硬武器发控过程,形成仿真回路,实现作战系统装备的联动,让各战位人员熟练装备的操作使用,熟悉潜艇作战流程。但是随着世界海军装备的发展,体系对抗和联合作战成为军事领域研究的热点,多平台、多系统的联合作战是一种不可阻挡的趋势,如何在潜艇上实现体系对抗和联合作战演练,对提高潜艇作战系统作战效能具有重要意义。
传统训练系统中各个目标都是按照预先设定的航路行进,战场态势一成不变,然而真实的战场态势瞬息万变,目标不仅有运动行为,同样有攻击和防御行为,甚至运用各类战术协同攻击等。如果进行战术演练则必须进行实装演习,耗费大量人力、物力和财力,制约了潜艇战术战法的研究。根据各类作战想定制定训练任务,并设计真实的战场态势,进而实现战术对抗和联合作战的训练成为潜艇作战训练系统新的需求。
2 HLA分布式交互仿真
高层体系结构(HLA)是一个开放的、支持面向对象的体系结构,用于产生计算机仿真系统的通用技术框架,主要考虑设计联邦成员间的交互,在此基础上进行联邦集成以达到仿真的目的。联邦是用于达到某一特定仿真目的的分布仿真系统,其运行过程称为联邦运行,它由若干个相互作用的联邦成员构成,最主要的一种联邦成员是仿真应用。仿真应用使用实体模型来产生联邦中某一实体的动态行为,它可以是应用程序,也可以是硬件平台。联邦成员间的信息交互通过支持环境RTI提供的服务来实现。HLA将应用层同底层支撑环境分离,即将具体的仿真功能实现、仿真运行管理和底层通信三者分开,隐蔽各自的实现细节,从而使各部分相对独立的进行开发,实现了应用系统的即插即用,保证联邦范围内的互操作和重用[1]。
HLA主要有3部分组成:规则、对象模型模板、接口规范说明和运行支持环境(RTI)。其中,规范描述了联邦成员和RTI的责任及关系,是仿真实现正确交互的基础;对象模型模板提供了一种标准的文档格式来描述联邦及其成员对象的模型信息;接口规范说明以服务的方式定义了联邦中联邦成员进行信息交互的方式,运行支持环境(RTI)是HLA接口规范的具体实现[1]。
3 潜艇作战训练系统设计
3.1 系统设计目标
(1)能提供面向特定训练任务的战场态势;
(2)能进行战术对抗训练任务,为研究战术战法提供平台;
(3)能进行作战流程的监控和回放;
(4)能进行作战过程的评估;
3.2 系统逻辑结构和各成员功能
潜艇作战训练的关键是营造出具有一定真实性的作战环境,根据对潜艇作战流程的分析,采用HLA体系结构,可以实现仿真平台和仿真模型的松耦合性,仿真台间具有良好的互操作性和可重用性,且保证系统的开放性和可扩展性。潜艇作战训练系统硬件及网络拓扑结构设计如图1所示。
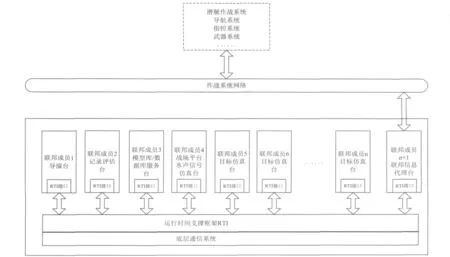
图1 潜艇作战训练系统结构框图
导演台:
(1)负责训练系统的联邦运行管理。系统运行前,创建联邦执行,在各仿真成员加入联邦后,启动联邦执行。在仿真过程中,负责整个联邦仿真时间的协调推进。
(2)负责战场态势初始化。将初始态势信息(包括本艇和目标位置,战场环境等)发布给相关的仿真台和作战系统。训练过程中,订购各个仿真实体的位置和动作,显示战场态势。根据训练任务需要,更改战场环境,或向各个目标仿真台下达各种命令,包括航路变化,攻击和防御等,实现对战场态势的超控管理。
记录评估台:
(1)接收并记录整个战场的真实态势,包括战场环境、本艇、目标、软硬武器等的位置、动作等,并进行二维和三维战场态势显示。
(2)对整个训练过程进行压缩,便于回放训练过程。通过制定相关评估指标和模型,完成对训练过程的评估,并自动生成评估报告。
模型库/数据库:
存储和管理战场环境数据库以及创建各个实体需要的模型库,满足各个仿真台对性能参数、模型、文件的存储、提取需求。
战场水声信号仿真台:
根据各个实体(潜艇、水面舰艇、鱼雷、声抗器材等)真实的位置和动作,以及相应的噪声参数、传感器性能参数等,模拟出各个仿真平台(包括训练潜艇)的传感器探测信息和数据链信息,为各个平台提供输入。
目标仿真台:
目标仿真台实现对特定类型目标的仿真。目标仿真台不仅模拟目标的运动行为,还模拟目标攻击和防御行为。它有两种工作模式,人工操作模式和自动模式。人工模式下需要人为操作仿真台,实现目标的机动,发射软硬武器等。自治模式采用计算机生成兵力CGF(Computer Generation Force)技术,依赖基于知识的智能自治模型,来实现目标的行为自治。自治模型根据特定的训练任务设计。另外,训练系统中需开发何种类型的目标仿真台,开发多少个,也需要根据特定的训练任务来决定。
仿真信息代理台:
由于潜艇作战训练系统与潜艇作战系统采用不同的网络通信模型,仿真信息代理台负责两系统间信息格式的转换,起到接口适配器的作用,实现潜艇作战系统和训练系统的互连互通。
在实际应用中,仿真应用可以是应用程序,也可以是硬件平台。由于潜艇内空间有限,只要硬件满足要求,可以根据需要将目标仿真台进行合并。同样,导演台和评估台也可以进行合并。
4 潜艇作战训练系统开发
以训练潜艇与两个潜艇CGF仿真台互连为例,介绍训练系统的开发实现。首先,确定联邦剧情,也是训练系统的训练任务:一艘敌方潜艇(CGF)进入我方某海域,我方两艘潜艇(一艘为训练潜艇,一艘为CGF)前去拦截。我方潜艇任务是搜索到敌方潜艇并击沉,敌方潜艇任务是穿过我方某海域。作战过程描述如下:
(1)敌我双方制定作战方案。
(2)敌方潜艇进入某海域,我方潜艇开始搜索敌方潜艇,双方都处于探测阶段。
(3)如果我方潜艇先探测到敌方潜艇,按照既定作战方案,选择攻击或防御,同样敌方潜艇也是如此。
(4)我方任务完成或敌方潜艇任务完成。
由于每次作战方案的不同,以及相遇时的态势不同等原因,每次进行训练时,战术对抗过程必定复杂多变,既可以充分训练战位人员的操作水平,也可以对各种战术战法进行操练。
按照联邦开发和执行模型FEDEP(Federation Development Execute Model)的六个基本步骤进行开发,即定义联邦目标、开发概念模型、设计联邦、开发联邦、集成和测试联邦、运行联邦和分析结果[1]。对训练系统来说,关键是开发联邦对象类和交互类、确定联邦成员间交互关系。
4.1 联邦对象类/交互类设计
为了确定潜艇作战训练系统中各联邦成员之间的数据流和控制流,要进行对象类和交互类设计。各联邦成员通过发布其它联邦成员感兴趣的对象类和交互类,订购自己需要的对象类和交互类,以实现联邦成员之间的互操作和信息交互。
对象类设计:
训练系统中的对象类主要有Entity(战场实体类)、Submarine(潜艇类)、Torpedo(鱼雷类)、Decoy(自航式诱饵类)、Information(潜艇信息类)、Sensor(潜艇传感器类)、DataLink(数据链类)。其中潜艇类、鱼雷类、诱饵类是战场实体类的子类,传感器类和数据链类是潜艇信息类的子类,各类的属性说明如下:
(1)Entity类属性
Type:敌我属性
Depth:深度
Speed:速度
Course:航向
Longitude:经度
Latitude:纬度
(2)Submarine类属性
SubmarineState:状态
ZongYao:纵摇
HengYao:横摇
(3)Torpedo类属性
TorpedoZhuangJiao:鱼雷转角
SelfGuideTime:自导开机时间
Fusee:引信动作
(4)Decoy类属性
DelayTime:系统延迟时间
WoreMode:工作方式
(5)Information类属性
Sonartartype:目标类型
TarDirection:目标方位
(6)Sensor类属性
SNR:信噪比
SonarDistance:估计距离
SonarSpeed:估计速度
State:载体状态
(7)DataLink类属性
Longitude:经度
Latitude:纬度
Course:航向
DetectTime:目标探测时间
交互类设计:训练系统中的交互类主要有TaiShi_Set(态势设定类)、Submarine_Move(潜艇机动类)、Submarine_TorpedoShoot(潜艇发射鱼雷类)、Submarine_DecoyShoot(潜艇发射诱饵类)。
(1)TaiShi_Set类参数
Depth:深度
Speed:速度
Course:航向
Longitude:经度
Latitude:纬度
(2)Submarine_Move类参数
SpeedChange:航速改变
CourseChange:航向改变
(3)Submarine_TorpedoShoot类参数
TorpedoType:鱼雷雷种
TorpedoMode:鱼雷工作方式
(4)Submarine_DecoyShoot类参数
DecoyType:诱饵类型
DecoyMode:诱饵工作方式
4.2 联邦成员关系
根据联邦成员划分,以及对象类和交互类组成,在潜艇作战训练系统中,联邦成员与对象类和交互类的关系如表1所示。
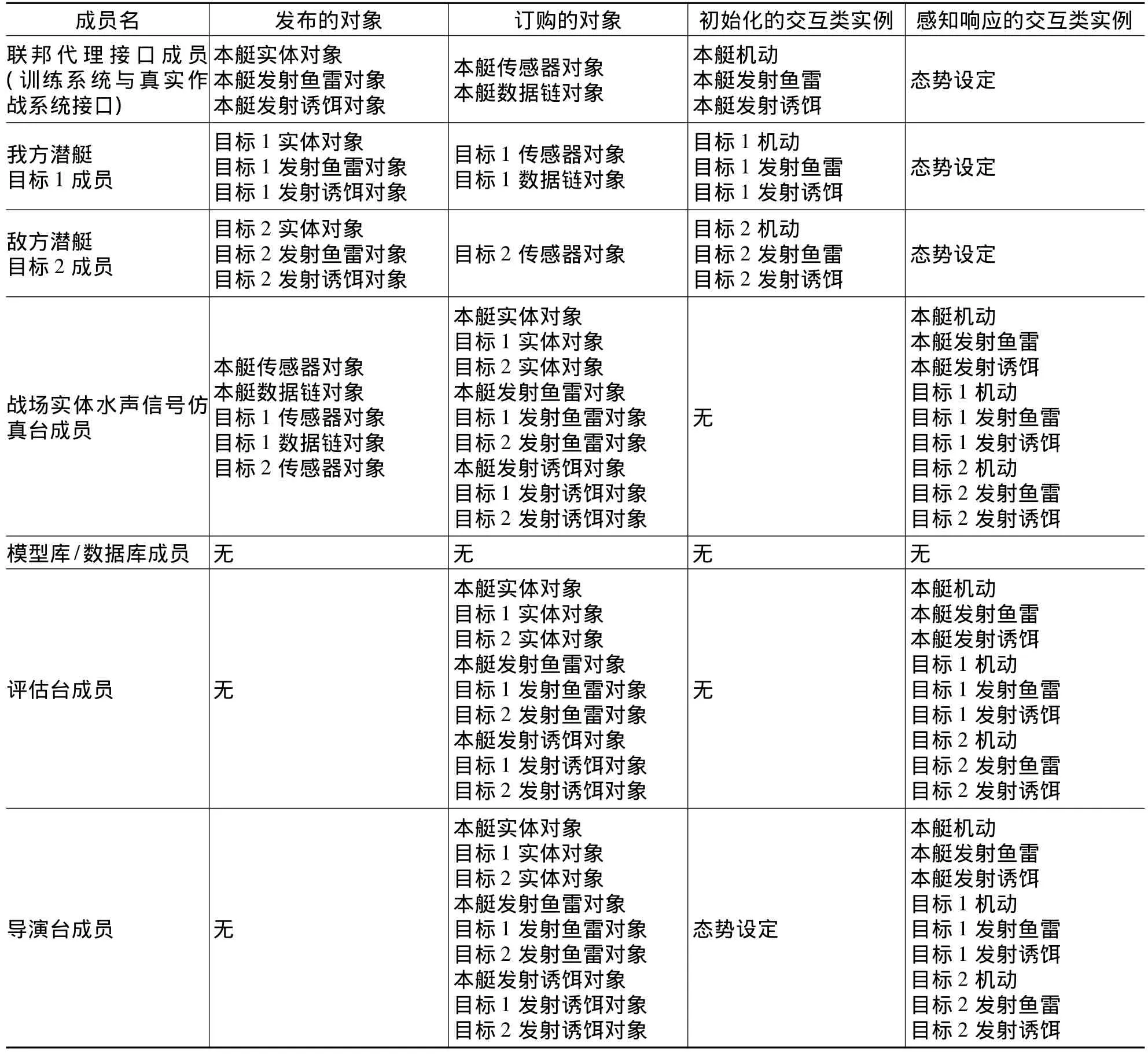
表1 联邦成员与对象类和交互类的关系表
4.3 联邦工作流程
潜艇作战训练系统RTI采用DMSO的RTI1.3,基于Visual C++开发。联邦的工作流程如下:
(1)导演台创建联邦执行,各个仿真成员加入联邦,联邦执行开始运行。
(2)导演台设定作战海域水文环境信息、电磁环境信息、两个潜艇仿真成员和训练潜艇的初始态势信息。两个潜艇仿真成员收到初始态势信息后,初始化自身状态;仿真代理成员接收后,转发至潜艇作战系统,各个仿真实体开始处于搜索探测阶段。
(3)水声信号仿真台根据各个实体的真实位置、各个实体传感器性能参数以及声场模型等,计算模拟各个实体的传感器探测信息以及数据链信息,并发布各个实体的传感器对象和数据链对象。
(4)两个潜艇仿真台获取态势信息后进行信息综合处理,通过自治模型决策或者人为操控管理,进行实体机动或者软硬武器的发控,发布自身实体对象或鱼雷实体、诱饵实体对象。仿真代理成员将训练潜艇的态势信息转发给作战系统,战位训练人员根据态势信息执行训练任务。
(5)敌方任务完成或我方任务完成,评估台根据评估模型自动生成评估报告。
(6)各联邦成员退出联邦,联邦执行结束。
5 结束语
提出了一种新的基于HLA的潜艇作战训练系统设计,并基于特定的训练任务,分析了系统的实现过程。训练系统具有较高可重用性,互操作性,易扩展性,可以与潜艇作战系统设备联机进行训练,满足部队联合作战演练的要求。下一步工作是根据部队具体的训练任务,开发潜艇作战训练系统装备。
[1]周彦,戴剑伟.HLA仿真程序设计[M].北京:电子工业出版社,2002.
[2]贾连兴.仿真技术与软件[M].北京:国防工业出版社,2007.
[3]马胜辉,杨艾军.基于HLA的炮兵侦察校射无人机训练仿真系统[J].指挥控制与仿真,2009,31(6):89-92.
[4]张晓明,王航宇.HLA的编队防空协同作战能力仿真[J].火力与指挥控制,2008,33(6):114 -117.
[5]付国宾,谭海涛.基于HLA的数据链作战运用仿真设计[J].指挥控制与仿真,2007,29(6):93 -97.
[6]刘健,刘宗,颜冰.基于HLA的潜艇隐蔽作战仿真系统开发研究[J].系统仿真学报,2004,16(3):420-424.
猜你喜欢
家庭影院技术(2020年10期)2020-12-14
汽车与安全(2020年1期)2020-05-14
当代体育科技(2020年9期)2020-05-12
中国外汇(2019年19期)2019-11-26
家庭影院技术(2019年7期)2019-08-27
中国化肥信息(2019年5期)2019-06-25
当代体育科技(2019年33期)2019-01-14
兵器知识(2017年8期)2017-10-16
环球时报(2017-07-04)2017-07-04
中国卫生(2015年2期)2015-11-12
