动车组异步牵引电动机系统
2013-05-15 12:55:30刘长志
海峡科学 2013年2期
刘长志
动车组异步牵引电动机系统
刘长志
中铁第五勘察设计院集团有限公司四电设计院
异步牵引电动机作为高速动车组中电力牵引交流传动与控制的一部分,通过分析旋转磁场产生原理,电磁转矩特性,转矩-转差率曲线,机械特性,电气制动特性,改变电压U1、磁极对数的调速方法,深入了解其工作原理和运行性能对牵引供电设计有很大帮助。
异步牵引电动机 旋转磁场 电气制动特性 牵引供电系统
0 引言
交流电机主要分为同步电机和异步电机两大类,二者的工作原理和运行性能有较大区别。在交流传动的动车中,牵引电动机大多采用异步电机,其结构简单,运行可靠,维护方便,效率较高,在变频器的控制下实现动车牵引性能的调速要求,深入了解其工作原理和运行性能对牵引供电设计有很大帮助。
1 异步牵引电动机的基本原理
1.1 旋转磁场
当对称的三相交流电流通入定子铁心上的对称三相绕组时,就在定子内建立起一个在空间连续旋转的磁场,称为旋转磁场。
对称三相电流——正弦波电流幅值相等、相位互差120°电角度:
A=ImsinωtB=Imsin(ωt-120°)C=Imsin(ωt-240°)
旋转磁场产生原理如图1。定子磁场随着电流的交变在空间不断旋转,旋转的转速称为同步转速n1。

图1 旋转磁场产生原理
1.2 异步电动机的工作原理
当定子三相绕组中通入三相电流,则产生一个转速为n1、顺时针方向的旋转磁场。
转子导体与旋转磁场之间存在相对运动,必在转子导体中产生感应电势,其方向可用右手定则确定。由于转子绕组是闭合的,则感应电势在转子导体中产生感应电流。
转子导体中的感应电流与旋转磁场相互作用产生电磁力F,其方向可用左手定则确定。电磁力F作用在转子上形成电磁转矩,使转子按旋转磁场的旋转方向转动。
为了在转子导体中产生感应电势和电流,转子与旋转磁场之间必须存在相对运动,则异步电机转子转速n总是小于同步转速n1,故称“异步电动机”。
转差率:
异步电动机(转子)转速:
n=n1(1-S)=60f1(1-S)/p
式中:f1—定子频率;f—转子频率;f2—转差频率;p—电机磁极对数;S—转差率; n1=60f1/p,n1—同步转速。
2 异步电动机调速
2.1 电磁转矩特性
2.1.1异步电动机的电磁转矩T
异步电动机的电磁转矩T可用以下公式表示:


S—转差率; n1—同步转速;
n—转子实际转速(r/min);

R2—转子电路电阻(Ω);
XL2—转子漏感抗, XL2=2πf2LL2=2πSf1LL2=SXL20。
2.1.2转矩—转差率曲线

图2 异步电动机T=f(s)曲线
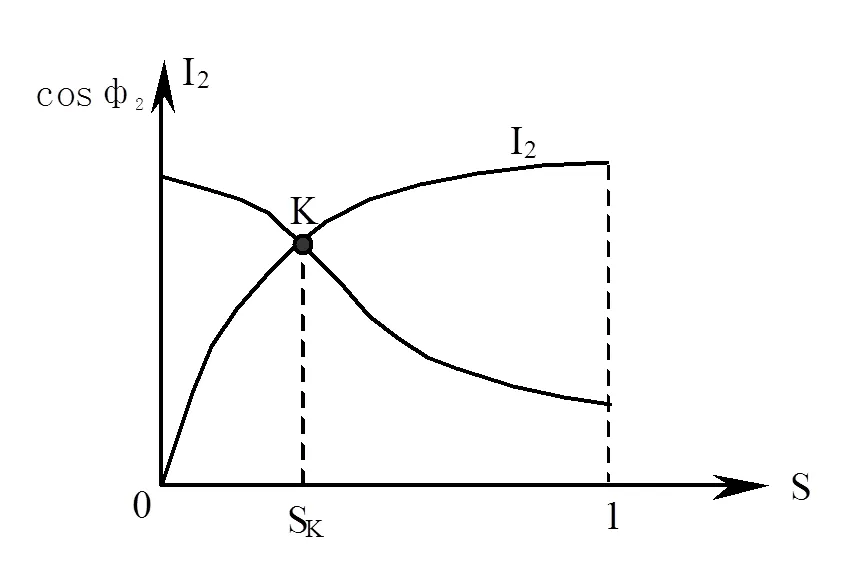
图3 异步电动机I2、变化规律
2.1.3转矩特性曲线上几个主要参数
(1)起动转矩Tq
起动转矩Tq一般为额定转矩Te的0.9~1.8倍,只有当Tq大于负载转矩时,电动机才能起动。
(2)最大转矩Tmax(颠覆转矩)
利用数学上求极值的方法可以求得临界转差率SK与电机参数的关系,即令dS/dt=0,得
Tmax一般为额定转矩Te的1.6~2.2倍。当负载转矩大于Tmax时,电动机就要停车,即堵转,俗称“闷车”,此时电动机的电流立即增至额定值的6~7倍,将引起电机严重过热甚至烧毁。
(3)额定转矩Te
异步电动机在额定负载下稳定运行时的输出转矩称为额定转矩Te,对于通用异步电动机的额定转矩可根据铭牌上的额定功率Pe和额定转速ne进行计算:

式中,Pe的单位为kW,ne的单位为r/min。
2.2 异步电动机的机械特性
当同步转速n1不变时(f1不变),由n=n1(1-S),很容易将图2所示的转矩特性曲线T=f(s)转换为常用的机械特性曲线T=f(n),见图4。
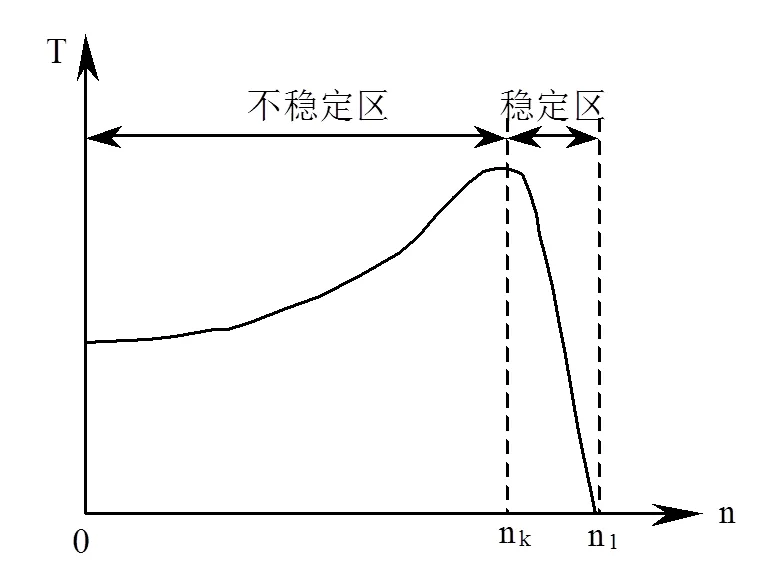
图4 异步电动机机械特性
在nk<n<n1的稳定区段内,转矩特性比较陡峭,转速变化范围不大,所以电机正常运行时的转速n很接近于同步转速n1,其额定转差率Se很小,一般Se=0.04~0.06。硬特性:使异步电动机自动调速困难,但具有良好的防空转性能。
异步电动机从转差率S=1开始起动,随着角速度ωm的不断提高,S 逐渐减少。当转差率S 减少到接近于0时,进入稳定运行状态。
对于每一个固定的供电频率,都有一条对应的类似曲线。当电动机的参数不变时,曲线的峰值(即电动机的颠覆转矩)与所施加的电压大小有关。不论是作为电动机或发电机,异步电动机只能在转差率接近于0的一个小的范围内保持稳定工作:0<S<|SK|。
2.3 异步电动机的电气制动
一般可以采用以下方法:再生制动、电磁制动器制动。
2.3.1再生制动(S<0)
在进行再生制动时,不论接到电动机端的是正序电压或是改变相序的电压,异步电动机都作为发电机工作,把机械能转变为电能,反馈到电源上去,即:在转子中感应相反方向的电压与电流。在定子中流过的用于平衡转子安匝的电流也是反向的,功率从电动机流向电源。而转子反向电流与旋转磁场作用产生与旋转方向相反的制动转矩。
2.3.2电磁制动器的运行(S>1)
如果电动机是正序电源电压供电的,就必须使电动机转子反转。此时,旋转磁场和转子之间的相对转速是正的,电动机转矩也是正的,从电源吸取功率。因为电动机沿反向旋转时,正向转矩将提供制动作用。由负载和惯性引起的机械功率变换所产生的电功率,以及从电源吸取的电功率都消耗在转子回路的电阻上,所以这种制动方式的效率极差。
2.4 异步电动机调速的基本方法
总的来说,异步电动机的调速可以从定子和转子两方面采取措施。从定子方面采取的措施有:变更加到定子绕组上的电压U1;改变定子绕组的磁极对数;改变电源的供电频率。从转子方面采取的措施有:变更转子电路中的电阻;在转子电路中串联一个或几个附加电阻,实行所谓的串级调速。
通常采用结构非常简单的鼠笼式异步电动机作为牵引电动机,由于这种电机的转子绕组是“短路绕组”,无法再在转子上采取调速措施。
2.4.1改变电压U1的调速
当改变U1来调速时,在机械特性陡峭的稳定工作区,其平衡工况点分别为a、b、c,对应的转速相差无几。可见用改变U1的方法来调速不但不能使转速有多大的变化,反而使电机最大转矩发生较大的波动,削弱了电机适应负载变化的能力。因此,不宜采用改变U1的方法作为异步电机的调速方法。
2.4.2改变磁极对数的调速
由f1=pn1/60可知,在电源频率f1不变时,异步电动机的同步转速n1与磁极对数成反比,所以,改变定子绕组的磁极对数p可改变它的同步转速n1,也就改变了转子的转速n。
磁极对数变更多少级,转子转速的变化也就有多少级,但变化的极数受到限制,否则使换接电路过于复杂,以致丧失运用的可靠性。因此这种方法的调速范围受到限制,且为有级调速,无法满足动车在较宽的速度范围内平滑调速。
2.4.3改变频率的调速
由n1=60f1/p可见,在磁极对数p一定的条件下,若能平滑地改变f1,就可以平滑改变n1,从而平滑调节电机的转速n,以满足动车牵引电动机转速从零到最大值的调速要求。
在动车上,异步牵引电动机由工频牵引电网供电,异步牵引电动机的变频调速只能采用另外的变频装置。在交-直-交传动系统中,牵引逆变器是实现异步牵引电动机调速的变频装置。
3 异步电机的等值电路及转矩表达式
异步电动机的等值电路如图5所示。
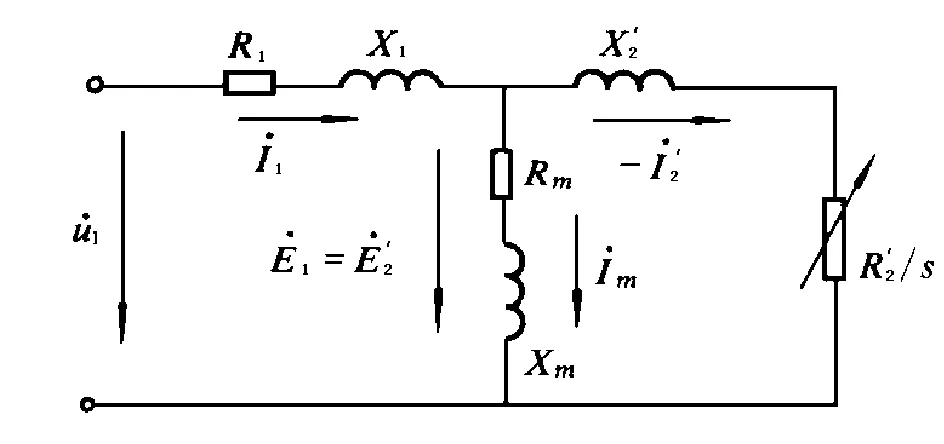
图5 异步电动机的等值电路
4 变频调速的控制方式及其特性
异步电动机在进行变频调速传动时,需要根据负载特性要求对变频器的电压、电流及频率进行适当的控制。变频调速控制方式的发展大体分为三个阶段:
第一阶段是普通功能型U/f控制方式的通用变频器,该控制方式是转速开环控制,不具有转矩控制功能;
第二阶段是高功能型的转差频率控制方式,其转速需要闭环检测,具有转矩控制功能,能使电动机在恒磁通或恒功率下运行,能充分发挥电动机运行功率,其输出静态特性较U/f控制有较大的改进;
第三阶段是高性能型矢量控制或直接转矩控制方式,可实现直流电动机的控制特性,具有较高的动态性能。
[1] 李益丰.DF8cJ交流传动内燃机车用JD123异步牵引电动机[J].机车电传动,2006(3):19-22.
[2] 李益丰.电动汽车异步驱动电动机的设计[J].变流技术与电力牵引,2003(6):35-38.
[3] 许实璋.电机学[M]. 北京:机械工业出版社,1982.
[4] 陈世坤.电机设计[M]. 北京:机械工业出版社,1982.
猜你喜欢
防爆电机(2022年4期)2022-08-17 05:59:12
防爆电机(2021年4期)2021-07-28 07:42:54
大电机技术(2021年2期)2021-07-21 07:28:34
电动工具(2020年6期)2020-12-29 05:53:36
中学物理·高中(2017年9期)2017-11-07 12:53:53
西安工程大学学报(2016年6期)2017-01-15 14:09:07
中国科技博览(2016年13期)2016-07-13 03:18:40
防爆电机(2015年6期)2016-01-27 05:06:57
中国老年学杂志(2015年18期)2015-12-30 08:45:41
电气开关(2015年2期)2015-06-23 16:21:26