
基于视频监控技术的转辙机缺口监测系统研究
2013-05-11 13:25:16尚春阳
铁路计算机应用 2013年11期
龙 彬, 尚春阳, 张 丹
(西安交通大学 机械工程学院,西安 710049)
道岔是铁路线路中至关重要的设备,而转辙机作为铁路道岔的牵引设备,能否可靠工作直接关系到铁路列车的安全运行[1]。由于列车在使用过程中的振动、磨耗等,会造成道岔尖轨与基本轨之间有缝隙,导致转辙机缺口位置产生变化,造成设备故障,影响行车安全。因此,转辙机缺口位置调整是电务维护的重要工作。本文设计了一种转辙机缺口实时在线监测系统,并在ZD9型转辙机上完成实验验证,通过了现场线路传输测试。该系统可以直接查看缺口视频,并通过图像处理技术实现缺口大小判断,帮助维修人员及时发现故障,提前进行维修,对确保铁路运输安全具有极其重要的意义[2]。
1 系统组成
该系统主要由缺口图像采集装置、数据传输模块、监测站机几部分组成,其结构框图如图1所示。系统主要采用CCD数字图像传感器采集缺口图像,将图像压缩处理后传送到监控室主机,通过上位机软件对图像进行处理,得出缺口位置状态。同时,电务人员也可以实时查看缺口视频,做出进一步的判定。
系统主要工作过程为:室外图像传感器采集转辙机缺口状态信息,通过220 V电力线路将缺口图像数据实时传输到数据集中器,然后采用ADSL数据传输方式,将视频信号传输到通信主机,与现有铁路信号微机系统并网连接,在室内上位机实现各个缺口状态的实时监测显示,通过图像处理技术计算缺口位置大小,并实时显示和报警。
2 硬件实现
2.1 视频采集装置
视频采集前端的核心部件是电荷耦合器件(CCD)数字图像传感器,位置检测传感器通常有机械式、光电式、电感式、图像式等。由于光电式传感器易受灰尘影响,机械式传感器易受机械振动和磨损的影响,电感式位移传感器受温度的影响很大,易出现误报警情况,综合考虑稳定性、可靠性等因素,最终选用CCD数字图像传感器[3]。由于转辙机内部封闭,无光源,需要在每个传感器的周围安装多个直接明场正照明白光LED,使缺口图像边缘轮廓在视频图像中清晰可见。视频模拟数据经过专用视频解码芯片TVP5146转换成数字视频信号,再送到视频处理模块的TMS320DM 365处理器进一步处理。

图 1 监测系统结构框图
视频处理模块采用新型TM S320DM 365[4]数字媒体处理器完成视频的压缩、编码、传输通信。DM 365 高度集成了众多组件,包括一颗ARM 926EJ-S 内核,一个H.264 高清编解码协处理器HDV ICP 和一个mPEG-4/JPEG高清编解码协处理器mJCP,可满足智能视频处理功能的集成影像信号处理解决方案,以及一系列板载外设等。 另外,由于每个转辙机对应2种状态:定、反位,因此需要添加一个视频切换电路,实现定、反位状态之间的视频切换。视频采集前端把对应数字视频数据输出给DM 365,其对视频数据进行H.264 压缩,并实现噪声过滤、视频稳定以及边缘增强等功能[5],由主控系统完成封装发给电力载波扩频通信(PLC)芯片,PLC芯片再封装成PLC数据帧发送到电力线上进行传输。视频采集模块组成框图如图2所示。
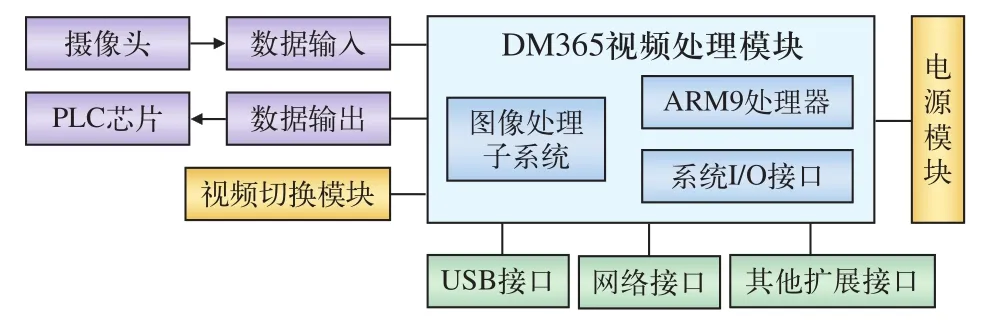
图2 视频采集模块组成框图
2.2 数据集中器
在铁路站点包括的道岔和转辙机数量从几十到几百不等,因此需要将不同监测终端采集到的视频图像压缩处理后封装成PLC数据帧传送到数据集中点进行统一传输,这样节省了大量铺设专用通信电缆的成本。本设计将不同终端的采集信号通过电力载波通信技术集中到数据集中点,再利用ADSL数据传输方式将数据信号传送到监控主机,实现监控室实时监测缺口位置状态。
所谓电力载波通信技术是指利用专用调制解调器把信号调制到一定的频率范围内,然后把信号加载到现有电力线或配电网线路中,实现高速数据、话音、图像等多媒体业务信号同时传输的一种通信方式[6]。电力载波通信使用频分技术,实现电源和数据的共线传输。实验证明,电力载波通信技术工作稳定、通信可靠。该系统调制解调器选用INT6400与INT1400芯片组[7],主芯片INT6400内核为ARM 926EJ-S处理器,它采用OFDM调制模式,其物理层传输速率可达200 mbps,MAC层工作模式为CSMA/CA。当视频采集模块的数字信号通过mII接口传输至INT6400,经过INT1400AFE模拟前端变为模拟信号,经过放大电路放大后由耦合器耦合到电力线上。在数据集中器B处电力载波接收部分是一个LC的带通滤波器,经过带通滤波电路出来的信号送到INT1400模拟前端并转化为数字信号,通过mII接口送至输出网口。
将数字信号通过网口接入ADSL局端设备,进行现代分频和编码调制后,通过铁路沿线备用电缆,将分频调制后通过通信主机将视频信号接入Internet,实现远距离高速非对称数据的可靠传输。
3 室内主机软件实现
3.1 监控软件设计
本设计上位机软件是在VS2010下开发完成的。运行软件,自动搜索各转辙机设备指定IP,并将各缺口视频在对应窗口显示,如果窗口不能显示,说明该报警系统出现线路故障,可尝试重新连接。在所有设备连接成功后,进行自动报警参数设置,如缺口图像循环处理的间隔时间,缺口额定报警值的大小等。设置完成后,进入自动循环监测报警模式,缺口示意图如图3所示。2侧缺口位置变化范围为0 mm~4 mm,当某一侧缺口大小超过额定值时,发出声光报警,并将错误信息保存。软件工作流程如图4所示。

图 3 转辙机缺口示意图
3.2 图像识别核心算法实现
该软件集成了机器视觉软件包HALCON[8],它以最新的计算机图像处理和计算机视觉技术为基础,提供了功能最强大、最全面的图像处理算法库,具有极强的高效性、准确性、健壮性和灵活性。监控软件采用HALCON和VC++混合编程方法实现图像处理相关核心算法[9],精确提取缺口边缘轮廓,计算缺口间隙值,其算法实现流程如图5所示。图像处理具体算法如下。
3.2.1 截取感兴趣区域(ROI)
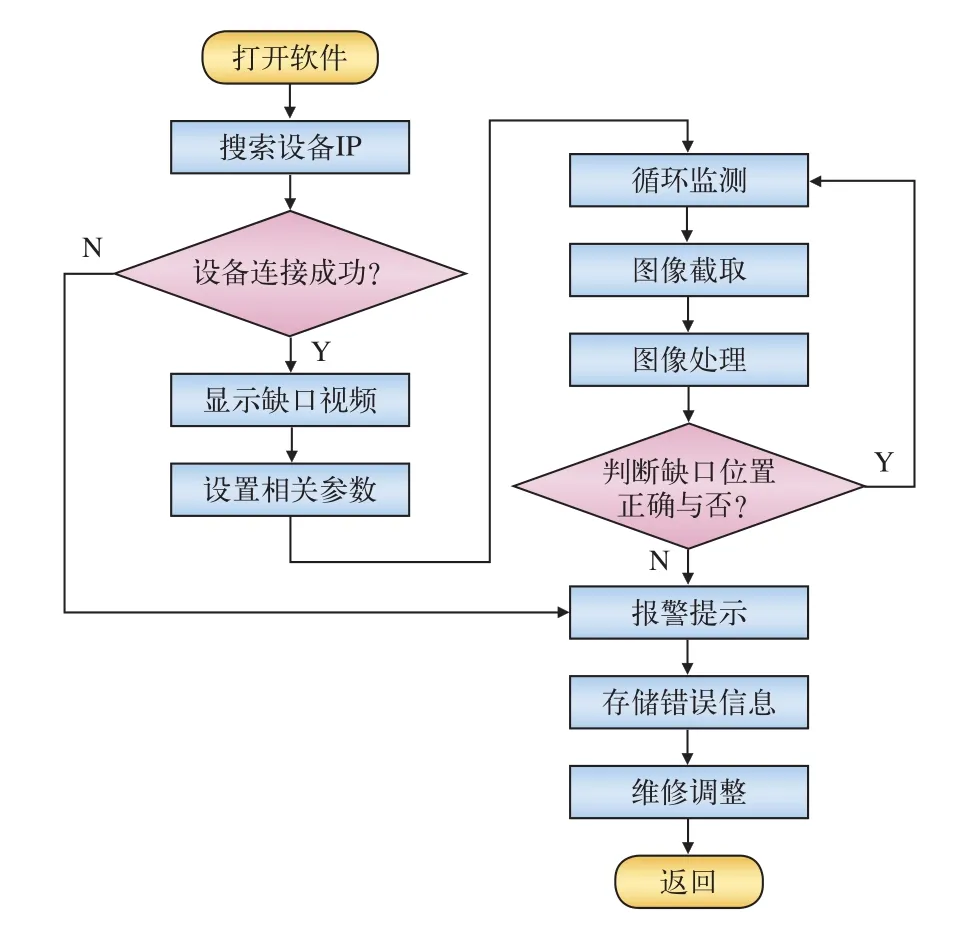
图 4 监控软件工作流程图
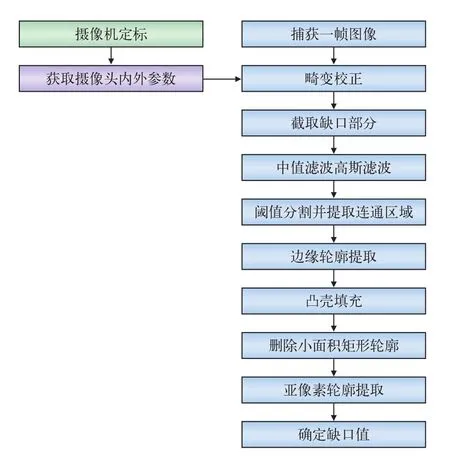
图 5 图像处理算法实现流程图
在安装图像传感器时不能保证传感器与缺口垂直,而且传感器与缺口间的距离很小,有较大的径向畸变,因此必须进行摄像机标定并对图像进行畸变矫正。原始图像如图6(a)所示,矫正后图像如图6(b)所示。对畸变矫正后的图像截取感兴趣区域(ROI),采用HALCON中提供的专用算子gen_rectangle1与reduce_domain实现,处理结果为图6(c)中白色交集区域。这样使得需要图像处理的区域限定在缺口部位相关图像区域,从而避免了其他不相关图像区域对处理过程的影响。
3.2.2 图像预处理
为了减少缺口图像边缘的毛刺和噪声对处理结果的影响,在提取边缘之前,需对截取出来的缺口部分Region进行高斯滤波与中值滤波,调用算子median_image和gauss_image。平滑滤波后的图像如图6(d)所示。
3.2.3 图像分割
为将表示杆、检查柱与缺口间隙区别开,需对平滑处理后的图像进行阈值分割,调用threshold算子二值化缺口区域,使得检查柱和表示杆灰度值为255,缺口间隙灰度值为0。然后调用connection算子连通每个区域,处理结果如图6(e)所示。很明显,中间检查柱部分上下边都有很多坑洞,为了便于缺口大小值的确定,需要将凹进去的部分灰度值填充为255。根据图像处理形态学可知,利用凸壳原理可以实现相应功能。调用shape_trans算子,其转化区域类型Type设置为'convex',处理结果如图6(f)所示。
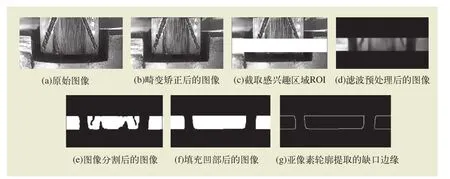
图 6 图像处理流程结果
3.2.4 缺口大小确定
为了提高图像处理精度,在将表示杆、检查柱和缺口间隙分离开后,调用edges_sub_pix算子提取缺口边缘亚像素精度轮廓,如图6(g)所示。由于在不同高度处的缺口间隙值不同,因此遍历多行不同高度的缺口值D1、D2,求取均值,以减小误差。
4 试验讨论
试验表明,缺口视频显示和间隙大小精度除受图像识别算法的影响外, 还受摄像设备、转辙机颤动等因素的影响。摄像设备径向畸变越小、分辨率越高、LED灯光效果越好,则缺口图像的识别精度越高。但是随着分辨率的增加,传输数据量也大幅增加,导致数据传输延迟,综合考虑后,系统选择352×288 分辨率,能得到较高的精度, 同时又能保证系统的实时性。另外,由于转辙机工作环境恶劣,需保证设备在各种极限条件下能稳定可靠的长时间工作,因此进行了部分特殊条件的测试。试验表明,设备在75°C高温,_ 40°C低温、80%~85% RH湿度以及50 HZ高频振动的环境下无异常,均能长时间稳定工作。
5 结束语
采用基于视频监控技术的转辙机缺口监测预警系统,安装方便,易于维护,具有很高的安全性、稳定性、可靠性。实验表明,本系统可以完全取代传统的人工监测工作,使转辙机缺口在事故发生前得到调整,提高了铁路运输的安全和效率。系统已在ZD9型转辙机上进行了实验验证,具有广阔的应用前景。
[1] 周长义,佟为明,宋志群.基于电力线载波通信的铁路转辙机缺口监测系统[J].电子与电 脑,2006(3):108-112.
[2]马万莹,樊文侠.基于ARM 9的转辙机缺口监测图像采集模块设计[J].电子科技,2012,25(2):78-81.
[3] JON S.WILSON.传感器技术手册[M]. 林龙信,译.北京:人民邮电出版社,2009.
[4] 戴鹏军,应时彦.基于DM 365的网络视频前端的设计与实现[J]. 杭州电子科技大学学报,2012,35(5):199-202.
[5] 项昌晨,王 磊.基于TMS320DM 365的网络视频监控系统设计[J]. 电子设计工程,2011,19(8):58-63.
[6] 陈 扬.电力载波视频监控系统通信模块研究[D].重庆 :重庆大学,2007:2-7.
[7] 范郁泉,刘 荫,陶维青.基于INT6400的电力线宽带调制解调器性能测试[J]. 电测与仪表,2012,49(5):43-47.
[8] Carsten Steger, Markus Ulrich, Christian Wiedemann.机器视觉算法与应用[M]. 杨少荣,吴迪靖,等,译.北京:清华大学出版社,2011:143-161,415-425.
[9] Rafael C. Gonzalez, Richard E. Woods.数字图像处理[M].阮秋琦,阮宇智,译.北京:电子工业出版社,2007:93-98,463-474.
猜你喜欢
今日农业(2021年6期)2021-06-09 08:05:10
支部建设(2020年30期)2020-12-18 01:04:28
铁道通信信号(2020年3期)2020-09-21 09:13:16
铁道通信信号(2020年1期)2020-09-21 08:55:00
铁道通信信号(2018年10期)2018-12-06 09:34:48
电子制作(2018年18期)2018-11-14 01:48:20
中国公共安全(2017年8期)2017-10-13 08:12:21
中国公共安全(2017年8期)2017-10-13 08:12:20
铁道通信信号(2016年6期)2016-06-01 12:10:20
中国卫生(2015年9期)2015-11-10 03:11:28
- 铁路计算机应用的其它文章
- 对等网视窗桌面系统共享目录的设置与应用