万能材料试验机测控系统的设计
2013-05-08 11:51赵继民王秀清
天津科技大学学报 2013年2期
赵继民,何 静,王秀清
(天津科技大学电子信息与自动化学院,天津 300222)
万能材料试验机(以下简称材料试验机)是生产行业、科研单位和各级质检部门在各类材料的质量检验、科学研究中最重要的检测设备之一.在国外,经过近 60年的发展,材料试验机的机械传动单元已经从单悬臂传动转向了双悬臂传动;测控系统由最初的继电控制转为微机控制;驱动系统也逐步由变频驱动升级为伺服驱动[1],从而保证了材料试验机在测试数据的精度、机械传动的灵活性及驱动的精准度方面都得到了极大的提高.国内材料试验机的技术水平也有较大提高,但在诸如测控系统等关键技术方面与欧美国家仍有较大的差距;同时,材料试验机一直是欧美对我国尖端科研课题限制出口的产品.而国内现有的材料试验机产品从检测精度等方面还不能达到某些材料的精度要求[2].
随着新材料的不断涌现和微电子技术的飞速发展,对于材料测试在数据处理、控制方法和设备集成度等方面也提出了更高的要求,国内现有的材料试验机变频测控系统已不能满足广大用户的测试需求,迫切要求试验机测控系统向数字化、智能化、集成化方面迈进[3].测控系统性能的优劣是决定材料试验机性能的关键因素,因而高品质的材料试验机测控系统对材料科学的发展、工业产品和工程结构的合理设计等方面都具有重要的作用.
针对材料试验机,本文基于虚拟仪器和微控制器技术设计了测控系统,并与传统控制系统进行对比.
1 材料试验机结构
材料试验机结构如图 1所示.该试验机由仪器底座(内置伺服驱动系统及减速系统)、控制台、力传感器、位移变形传感器及动悬臂等装置组成.控制台内置的测控系统是整个仪器的控制核心,同时也是本文探讨的主要内容.
2 测控系统硬件设计
测控系统主要由仪表放大器、A/D转换器、信号调理电路等构成的力检测及计量单元,由增量式光电编码器、脉冲计数器、鉴相电路等构成位移、变形检测及计量单元,由液晶显示器、键盘等构成人机接口. 同时,系统通过 Modbus协议控制伺服驱动单元以精确的转速实现材料试验机的速度调节控制、位移变形控制及试验力的保持控制等功能.利用虚拟仪器在多核、数据处理、通用性及可扩展性上的优势,构建基于 LabWindows/ CVI开发平台的材料试验机检测与分析系统,提高了设备运行的可靠性和测试效率.
图2为测控系统硬件功能框图.
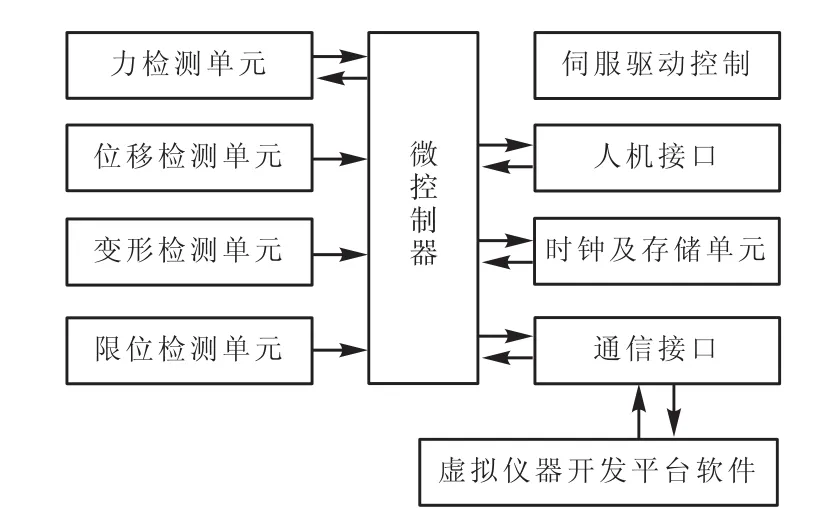
图2 测控系统硬件功能框图Fig.2 Diagram of the hardware functional block of the monitoring and control system
2.1 微控制器接口电路
系统要用到 SPI总线、RS-485总线、I2C总线、RS-232通信、脉冲计数等功能.而 Atmel公司的ATmega64是基于增强的AVR RISC结构的低功耗8位 CMOS微控制器,具有先进的指令集以及单时钟周期指令执行时间,可以缓减系统在功耗和处理速度之间的矛盾;同时 ATmega64外围接口齐全,内置看门狗电路及掉电检测电路,是基于 CISC指令集的 8位微控制器所不能比拟的,故系统选用ATmega64微控制器作为控制系统的核心.
图 3为微控制器接口电路原理图,其中,Y2为微控制器的时钟输入引脚,U5为时钟驱动器,型号为PCF8563,PCF8563与ATmega64之间采用I2C总线通信接口.

图3 微控制器接口电路原理图Fig.3 Diagram of the schematic circuit of the microcontroller interface
2.2 力检测单元
力检测单元主要用于实时采集与处理应变片式轮辐力传感器的差分模拟信号.电阻应变片是一种将被测对象上的应变变化转换为电信号的敏感器件[4].这种应变片在受力时产生的电阻变化通常较小,一般都组成应变电桥,其输出为毫伏级的差分信号,并通过后续的调理电路对差分信号进行处理,再传输给A/D转换电路将差分信号转换成数字量.
力检测单元的电路原理如图 4所示,其中,AD1+、AD1-为力传感器差分输入端.选用的AD7714是基于Σ-Δ转换技术的模数转换器.该转换器具有可编程增益前端,可直接接受来自传感器的低电平的输入信号[5],故在本系统中不需考虑对传感器输出的差分信号的放大;LM336BZ2.5为 2.5,V的电压基准源,用于为AD7714提供基准电压.

图4 力检测单元电路原理图Fig.4 Diagram of the schematic circuit of the force detection unit
2.3 位移、变形检测单元
在材料试验机中,对位移、变形两个物理量的检测是通过增量型编码器来实现的.增量编码器的输出为方波信号,在设计时要考虑编码器的方波计数电路的抗干扰设计及鉴相电路设计.SN74HC14D为具有波形整形功能的高速施密特触发器,用于对编码器输出的波形进行整形;SN74LS74是边沿 D触发器,用于对增量编码器输出信号的鉴相.而脉冲计数单元直接采用ATmega64微控制器内置的16位外部事件计数器 Timer1来实现.位移及变形检测单元电路原理如图5所示.

图5 位移与变形检测电路原理图Fig.5 Diagram of the schematic circuit of the displacement and deformation detection
2.4 伺服驱动单元
伺服驱动是闭环控制,而变频驱动通常工作于开环控制,所以无论从速度还是控制精度上,变频驱动都无法和伺服驱动相比.目前,伺服驱动的控制方式主要有 3种:驱动器面板设定、模拟量输入设定及总线指令设定[6].从控制难易程度上来看,面板设定较后者方便,而从操作的灵活性及精度上来看,总线指令设定方式大大优于前者.故本测控系统对伺服驱动单元的控制采用了总线驱动方式.伺服驱动器的总线遵循 Modbus工业总线协议.Modbus协议是第一个真正用于工业现场的总线协议,是应用于电子控制器上的一种通用语言.通过此协议,控制器相互之间、控制器和其他设备之间可以进行安全可靠的通信操作.本系统的伺服驱动接口电路设计如图6所示.

图6 伺服驱动接口电路Fig.6 Diagram of the schematic circuit of the servo driving interface
2.5 人机接口及通信接口电路
人机接口包含液晶显示和键盘输入,如图 7所示.液晶显示单元采用 DM12864汉字图形点阵液晶;同时,为保证键盘输入的稳定性及安全性,使用了键盘控制驱动器 CH452,避免了自建模拟键盘因干扰因素而导致的误操作.
系统可将试样的检测数据实时上传至计算机,由上位机的系统软件对检测数据进行处理.检测系统与计算机之间采用USB通信接口.USB控制芯片为南京沁恒公司的基于USB1.0协议的CH376.

图7 人机接口及通信接口电路原理图Fig.7 Diagram of the schematic circuit of the man-machine interface and communication
3 系统软件设计
3.1 上位机软件
上位机软件采用 LabWindows/CVI作为开发环境.虚拟仪器是在以通用计算机为核心的硬件平台上,由用户设计定义,具有虚拟面板,测试功能由测试软件实现的一种计算机仪器系统[7].用户可以通过友好的图形界面操作计算机,就像在操作自己定制的一台传统仪器一样.它充分利用计算机的运算、存储、回放、调用、显示以及文件管理等智能化功能,同时把传统仪器的专业化功能和面板控件软件化,使之与计算机结合起来融为一体,这样便构成了一台从外观到功能都完全与传统仪器相同,同时又充分利用计算机智能资源的全新的仪器系统.
系统软件的主界面如图 8所示.可以完成基于逆波兰算法的符合国家标准的自动输入及存储、数据显示、曲线分析、自动报表、多种测试方法、数据再分析等功能,可以实现打印、测试、统计、单位切换、传感器通道切换、仪器控制等操作.
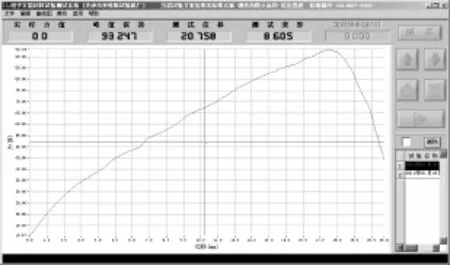
图8 系统软件主界面Fig.8 Main interface of the system software
通过上位机软件,可实现对仪器的速度和位移控制,并实时显示当前的试验力数据、位移变形数据、试验力及位移峰值;可实现包括断点停机控制、定荷重控制、定位移控制、力量保持控制、自动回归控制等控制和测量方式.
3.2 微控制器软件
3.2.1 试验力数据采集
ATmega64与AD7714通过SPI接口来实现数据的传输,AD7714包括6个可通过SPI接口访问的片内寄存器,与任何寄存器通信都要首先向通信寄存器写入.AD7714上电或复位后,可通过两种不同的读选项确认 AD7714的采集过程是否完成:一是查询DRDY引脚以确定数据寄存器更新是何时进行的;二是查询通信寄存器中的 DRDY位以确认数据寄存器是否进行过更新.本系统采用的是第一种方法.
3.2.2 位移、变形数据采集
位移、变形传感器输出为方波信号,Atmega64微控制器要对处理后的方波信号进行转换处理,ATmega64的Timer1具有外部时钟输入捕获功能(图3中的 PD6引脚),而变形编码传感器具有相位相差90°的两路信号输出,通过鉴相电路的处理即可得到实际变形量.变形数据处理子程序如下所示:
void BXDateGather(void)//变形数据采集函数
{
unsigned char tcnt2,tcnt3;
tcnt2=TCNT2;//读取Timer2捕获的变形脉冲数
tcnt3=TCNT3;
if(JianXiang)//变形编码器正向旋转
{tcnt2+=tcnt3;
Counter+=tcnt2;
}
else//变形编码器逆向旋转
{tcnt2-=tcnt3;
Counter-=tcnt2;
}
BianXing=Counter*XiShu;//得到实际变形值
}
4 实 验
依据国家标准[8]进行系统整机配置,并依据相应的行业标准[9]对试样进行验证性实验,经过大量测试,得到本测控系统主要技术参数,并与传统测控系统对比,见表1.表中FS表示满量程.
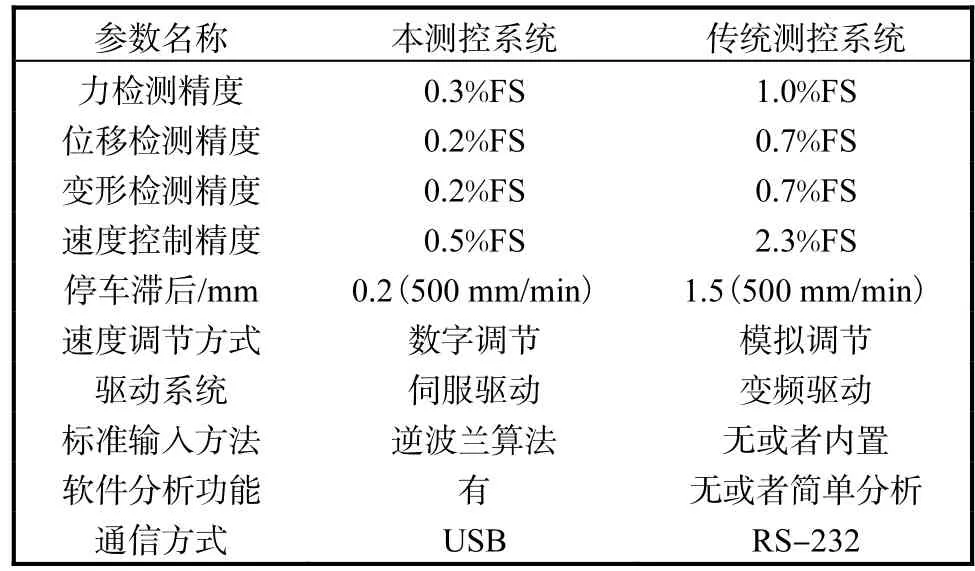
表1 系统性能指标对比Tab.1 Index contrast of the system performance
从表 1可以看出,本测控系统在测控精度、运动控制的精确性及软件的功能等方面均比传统试验机测控系统有较大提高.
5 结 语
本文设计了材料试验机测控系统,详细给出了系统硬件设计,介绍了实现的部分功能.与现有测控系统比较,本测控系统在控制精度、实现的功能等方面均有较大提高.目前,测控系统已成功应用于天津市美特斯试验机厂等试验机生产厂家的产品上.实践表明,系统运动控制精确、精度高、稳定性好,并具有较强的数据分析处理能力.
[1] Shao Junpeng,Chen Lihua,Sun Zhibin. The application of fuzzy control strategy in electro-hydraulic servo system[C]// Proceeding of IEEE International Conference on Mechatronics and Automation. Piscataway:IEEE,2005:2010–2016.
[2] 隗幼鹏. 材料试验机的现状与展望[J]. 现代制造工程,2003,8(增刊):82–83.
[3] 郑列勤,易建军,李辉,等. 万能材料试验机中交流伺服电机控制技术的研究[J]. 中国测试技术,2006,32(3):23–25,74.
[4] 李明,何首贤. 基于 MSP430的材料扭转试验机测控系统设计[J]. 长春大学学报,2011,21(4):1–4,8.
[5] Analog Devices Inc. AD7714 Datasheet[EB/OL].[2012–05–16]http://www. analog. com/static/importedfiles/data_sheets/AD7714. pdf.
[6] 刘鑫,程志辉,代娜,等. 基于LabVIEW的摩擦材料试验机测控系统[J]. 湖北工业大学学报,2011,26(2):94–96.
[7] 王建新,杨世凤,隋美丽. LabWindows/CVI测试技术及工程应用[M]. 北京:化学工业出版社,2006:15–18.
[8] 全国试验机标准化技术委员会. GB/T 16491—2008 电子式万能材料试验机[S]. 北京:中国标准出版社,2008.
[9] 交通部公路科学研究院. JTG E50—2006 公路工程土工合成材料试验规程[S]. 北京:人民交通出版社,2006.
猜你喜欢
哈尔滨轴承(2021年1期)2021-07-21
中国船检(2020年11期)2020-11-27
哈尔滨轴承(2020年2期)2020-11-06
哈尔滨轴承(2020年1期)2020-11-03
哈尔滨轴承(2020年1期)2020-11-03
中国信息化周报(2020年15期)2020-05-11
电子制作(2017年14期)2017-12-18
汽车文摘(2017年6期)2017-12-06
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01