借径Scratch 将人工智能引入课堂
2013-04-29 05:22许凯
中小学信息技术教育 2013年9期
许凯

人工智能教学进入课堂困难重重
2013年7月初,中国在荷兰举办的机器人竞技顶级赛事“Robocup机器人世界杯”中夺冠,在人工智能领域率先圆了中国足球的冠军梦。但在我看来,我国在人工智能领域获得的辉煌战绩并不能与青少年整体素质划上等号,充其量只是在小范围的“精英培育”中取得了成果,将人工智能教学引入课堂教学,仍然任重道远。
多年来,我尝试将初级的机器人教学作为人工智能的入门引入课堂,但事倍功半,收效甚微。硬件器材的高额投入与长期维护、专业的场地和环境要求、课堂教学模式难于组织和管理……种种原因,都限制了其在青少年中的推广和普及。
全虚拟环境助推人工智能教学普及
近年来,Scratch在国内迅速崛起,并已形成了不同的课程观点,展示了Scratch不同侧面的风景。大部分教师将其定位于数字化或艺术化的创作工具,也有相当部分的教师将其作为天然的人工智能教学载体,配合Wedo、picoboard、Arduino等开源硬件,尝试各种光、温、触等传感器的使用,开展“软硬件结合”模式的教学,并且针对不同年龄特点开发出了丰富的优秀教学案例。
这些案例在开展实验时必须依赖硬件,适合开展基于小组的项目式学习活动,但若试图将其引入课堂教学,势必带来普及上的困难。因此,我探索出了一种更适合于普及整班教学的“全虚拟环境”模式。该模式不依赖任何硬件,因此在平台普及上不需要成本,在教学条件和环境上无特殊要求,在教学组织管理上等同于普通电脑课。
常见传感器的虚拟三例
在此,我选择三种基础和常用的传感器,借由Scratch虚拟绘制出硬件和所需的环境,让大家充分感受虚拟环境下“神”(程序)与“形”(结构)的相辅相成、互相影响。
实例1:触动传感器——模仿人类的触觉系统
触觉传感器是通过电源的通/闭向计算机传输一个布尔值,表示有触碰或无触碰。如在Scratch中虚拟的“智能碰碰车”,用红色和黄色来代表两辆小车头部和尾部的触感。当红色与黄色部分碰到其他角色,就代表两辆小车之间发生了相撞;如果碰到黑色,说明撞到了四周墙壁。不同的触感撞到不同的区域,小车就会执行前进、转弯或倒退等不同的指令。
实例2:光反射传感器——模仿人类的视觉系统
常见的光感可以把接收到的环境明暗度量化,以感知外界的颜色,最典型的应用就是“走黑线”。如用一个圆点代表光感,以这个光感是否探测到黑线进行编程。我们可以让多个光感协同工作,既提高走线的效率,又能应对难度更高、更复杂的黑线。
实例3:超声波传感器——模仿蝙蝠的超声波系统
通过超声波的发射和接收来判断前方是否有障碍物及与障碍物的距离,这是一种比触感更为先进和实用的感知功能。
下面,我以“超声波走迷宫”为例,作一个较详细的教学设计说明。
教学目标:(1)认识和掌握Scratch中“且”、“或”、“不成立”三种逻辑关系。(2)初步了解超声波传感器的原理和用途。(3)自主学习并思考解决迷宫问题的相关策略,领悟“迷宫法则”。(4)领悟解决问题需要技术与战术的有效配合,设计思路是战术,把思路具象化的编写代码过程是技术,二者缺一不可。(5)了解程序设计包含3个重要步骤:设计、编写和调试。
1. 虚拟场景 提出问题
师:还记得以前我们学过的碰碰车和走黑线分别模拟了什么传感器吗?它们模仿的是人类的哪些感知系统?我们再来观看一段我校选手参加国际大赛的视频,猜一猜他们使用的是什么传感器,其原理是什么?
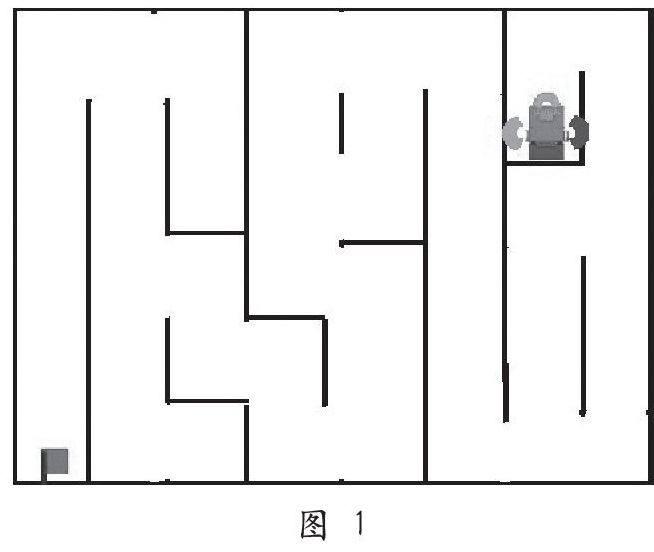
师:在迷宫(如图1)中,小车装备了3对超声波传感器。请同学们补全程序,让小车自动识别道路,走出迷宫,到达红旗所在的终点。
图 1
【设计意图】用学过的触感和光感引出超声波传感器,让学生了解超声波是模仿蝙蝠研发的传感器,并通过真实比赛的视频让学生了解其基本结构、原理和用途。
2. 自主探究 补完程序
师:请看老师提供给大家的程序半成品(如图2)。需要大家思考的是,当前方、左侧和右侧3个不同颜色的超声波传感器满足什么条件时,小车可以执行前进、右转和左转的动作?
图 2
师:前方的超声波传感器没有检测到墙壁,在编程中该怎么实现“没有检测到”呢?若要同时满足两个甚至三个条件,怎么办?逻辑关系中的“且”、“或”又有什么异同?
教师用生活中的实例来讲解三种逻辑关系:小明还没做完作业(小明没做完,不成立);小明并且小红都做完了作业(两人都完成,“且”关系);小明或者小红做完了作业(两人中有一人完成,“或”关系)。
【设计意图】这个任务看似简单,其实学生自主观察、思考和实验的工作量相当大。例如,第一个如果,满足“小车没有撞墙”的条件,小车即可移动一步,但学生没有学过“非”的逻辑,即Scratch中的“不成立”。如果二和三分别表示小车满足什么条件执行右转和左转的指令,此时,不但要满足前方超声波“撞墙”这一条件,还要检测左右两边超声波的不同状态,因而要用到逻辑关系“且”。
3. 完善程序 查漏补缺
师:补全了程序,小车可以开动起来了,但有同学发现,小车前进过程中还会遇到一些阻碍,请同学分析出错的原因,完善程序。
【设计意图】让学生了解程序调试的重要性,程序运行的实际过程中遇到的问题可能是多种多样、不可预见的。但限于课堂教学时间和难度限制,不能设置过于繁杂的错误和漏洞。
4. 调试竞速 寻求极限
师:大家的程序都完成了,并且能够顺利到达终点了,我们来比一比谁的速度快吧。如果想加快小车速度,要修改哪个参数呢?
师:同学们在提高速度的时候,要循序渐进地调试,要以“稳定”为前提,找到一个又快又稳定的“临界值”。同时,根据我们以往的经验,当程序无法再提高速度时,我们还可以尝试调整硬件。
【设计意图】竞赛的过程是一个将自己的实验作品“产品化”的过程,也是让学生体验学以致用、付诸社会实践并获得反馈的过程。从中得到的反馈会有力地驱动学生不断调整、优化自己的实验作品。寻找稳定和性能兼备的“临界值”是一个非常考验学生能力、反映学生性格的过程。如果追求稳定而盲目保守,则速度肯定落后;如果追求性能而罔顾稳定,则可能连基本任务都完成不了。而当程序无法再优化时,可以考虑调整硬件,体现软件与硬件统一、结构与程序互补的“神形合一”思想。
5. 增加难度 领悟法则
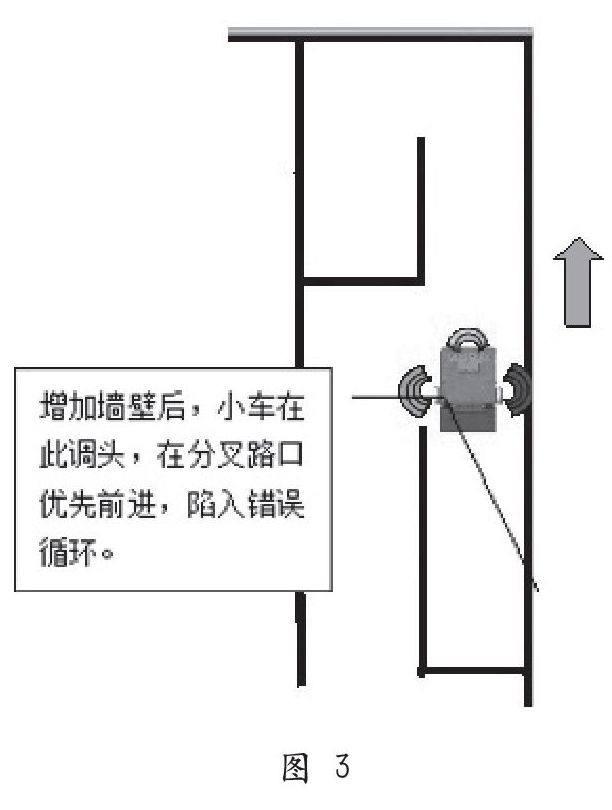
师:老师再给迷宫加一道墙壁,大家会发现,机器人调头后,在应该左转的地方没有左转,反而前进了(如图3),导致小车陷入错误循环。为什么会这样呢?我们应该怎样修改程序?接下来,请同学们打开百度百科,搜索用于解决迷宫问题的“迷宫法则”。
图 3
【设计意图】我先让学生在这个提高难度的题目中“百思不得其解”,再提示学生用百度搜索解决迷宫问题的法则。经历了之前的大量尝试,当学生阅读到网上正确的解法时,定会醍醐灌顶,恍然大悟。
上述纯软件人工智能教学模式,非常易于入门与普及。我们可以尝试软件与硬件分开的整班教学形式,即与此同时,利用硬件器材如电子百拼与面包板开展纯硬件的实践,了解二极管、电机、电阻及电容等硬件基本知识。经过一段时间的学习和积累后,可再以兴趣小组或社团活动的形式开展Scratch与各种硬件平台结合的项目学习活动,学习软硬件的结合与互动。
(作者单位:江苏苏州市敬文实验小学)
猜你喜欢
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
文苑(2018年22期)2018-11-19
电子制作(2018年11期)2018-08-04
电子制作(2018年8期)2018-06-26
文理导航·科普童话(2016年7期)2017-02-04
女友(2016年3期)2016-09-13
文理导航·科普童话(2016年4期)2016-05-31
儿童故事画报·智力大王(2015年12期)2016-01-23
儿童故事画报·智力大王(2015年2期)2015-05-20