一种双通道雷达接收机的测角技术
2013-04-20 00:45:06茹胜华
制导与引信 2013年1期
茹胜华
(上海无线电设备研究所,上海200090)
0 引言
测量弹目视线角是雷达导引头对目标进行角跟踪的前提。在雷达导引头中,振幅和差式单脉冲雷达天线是一种常用的探测传感器,与其配套的测角处理方式有多种。有一种测角系统,它采用双通道接收机的处理方式提取目标的俯仰和偏航角误差信息,从而完成对目标偏离角度的测量。该双通道接收机处理方式可以降低对回波接收机中频放大器性能的一致性要求,使对器件的要求也相应得到降低,具有较好的工程实现性。虽然单脉冲测角系统早已广泛应用,但是对于一个新测角系统的设计,本文依然有一定的借鉴意义。
1 测角原理
双通道测角系统的接收机拥有两个特性相同的AGC中频放大器,分别处理“和+差”(Σ+Δ)与“和-差”(Σ-Δ)中频信号,所用回波天线为振幅和差式单脉冲雷达天线,天线上的和差器将目标的回波信号转换成“和”微波信号(即Σ 微波信号)、高低方向上的“差”微波信号(E 微波信号)、方位方向上的“差”微波信号(A 微波信号)输出,由此天线的测向坐标是“+”字坐标(垂直方向上的坐标轴称高低坐标轴,简称E 轴;水平方向上的坐标轴称方位坐标轴,简称A 轴),而天线的转角驱动(执行坐标)一般是“×”型坐标(俯仰方向,简称P轴;偏航方向,简称Y 轴)。“×”型坐标系是“+”字坐标系旋转了45°角的坐标系,它们之间有一个45°角的转换关系。
双通道测角原理框图如图1所示。从回波天线输出的信号是“和”微波信号(即Σ 微波信号)、高低方向上的“差”微波信号(E 微波信号)、方位方向上的“差”微波信号(A 微波信号)。E 微波信号与A 微波信号按正交方式,经微波调制合成器调制成两个正交的微波调制信号,并且又在微波调制合成器内进行相加,最终形成Δ 微波信号。Δ 微波信号再送入下一级的微波叠加器,在微波叠加器中又进一步与微波“和”信号(Σ 微波信号)进行加减,输出(Σ+Δ)微波信号和(Σ-Δ)微波信号。(Σ+Δ)微波信号和(Σ-Δ)微波信号又与微波本振混频后,再经中频放大、AGC 归一化和检波,转化成低频的(Σ+Δ)/Σ 信号和(Σ-Δ)/Σ信号。

图1 双通道测角原理框图
将(Σ+Δ)/Σ 信号和(Σ-Δ)/Σ 这两个信号相减,得出Δ/Σ信号,再用调制源移相45°的同步信号u1和u2来对Δ/Σ 信号进行鉴相解调和滤波,得出坐标系旋转45°的俯仰角误差电压和偏航角误差电压[1~3]。
2 测角解算
Σ微波信号是回波天线的“和”微波输出信号,其值为uΣsin(2πf0t),其中f0为目标反射信号频率,uΣ是与回波天线接收到的电磁信号大小正相关的电压值,并假设天线和差器的相移为零。E微波信号是回波天线的“高低”输出微波差信号,其值为uEsin(2πf0t),uE是与回波天线接收到的电磁信号大小相关的电压值,并与目标偏离天线轴的夹角θE成正相关,当目标小角度偏离天线轴时,uE≈k1uΣθE,k1为一比例系数[1]。A 微波信号是回波天线的“方位”输出微波差信号,其值为uAsin(2πf0t),uA是与回波天线接收到的电磁信号大小相关的电压值,并与目标偏离天线轴的夹角θA成正相关,同样,当目标小角度偏离天线轴时,uA≈k1uΣθA
[1]。Δ 微波信号是个调幅信号,微波调制合成器的等效数学模型如图2所示。微波调制合成器的输出信号表达式为
图2 微波调制合成器的等效数学模型
式中:ω1为微波调制合成器的调制信号角频率;uω为调制信号的幅度,uΔ=uω(uE2+uA2)1/2,φ=arctan-1(uE/uA)。
微波叠加器对Σ 微波信号和Δ 微波信号作加减运算,输出(Σ+Δ)微波信号和(Σ-Δ)微波信号。其中(Σ+Δ)微波信号表达式为

(Σ-Δ)微波信号表达式为

式(2)和(3)中,m=uΔ/uΣ是调幅度。
微波叠加器的等效数学模型,如图3所示。

图3 微波叠加器的等效数学模型
调制源,一方面驱动微波调制合成器将E 微波信号和A 微波信号调制成两个正交的微波调幅信号,另一方面又输出与驱动微波调制合成器的调制信号(uωcosω1t和uωsinω1t)同步的且又移相45°的正弦解调信号u1和u2,其中u1=uωsin(ω1t+π/4),u2=uωcos(ω1t+π/4)。u1和u2对检波后的低频Δ 信号进行解调的基准信号。u1和u2信号的45°滞后相位是移相器的移相结果。
图1中,移相器是将u1和u2信号作一个相位移动(相对于调制信号uωcosω1t和uωsinω1t),它被用来实现回波天线接收信号的坐标(+字坐标)与驱动坐标(×型坐标)之间的转换。
AGC 中放和检波一方面放大混频后的微弱中频信号(ΣI+ΔI)和(ΣI-ΔI),使之成为幅度较大的中频输出和检波输出信号,为其后的信号处理提供较佳的信号环境;另一方面对输出信号作归一化处理(即AGC 的归一化作用),把(ΣI+ΔI)中频信号和(ΣI-ΔI)中频信号转化成中频输出的(ΣIO+ΔIO)/ΣIO信 号 和(ΣIO-ΔIO)/ΣIO信号,再由检波器转化成低频的(ΣO+ΔO)/ΣO信号和(ΣO-ΔO)/ΣO信号。
AGC归一化后的中频输出信号(ΣIO+ΔIO)/ΣIO为

AGC归一化后的中频输出信号(ΣIO-ΔIO)/ΣIO为

式(4)和(5)中,k2是AGC 中放的归一化系数。
低频(ΣO+ΔO)/ΣO信号为

低频(ΣO-ΔO)/ΣO信号为

式(6)和(7)中,k3是检波增益。
将图2、图3的等效模型图,以及k2和k3融入图1,可得到图4的等效模型图。
图4 中,将 低 频(ΣO+ΔO)/ΣO信 号 与 低 频(ΣO-ΔO)/ΣO信 号 相 减,得 到ΔO/ΣO信 号 为u5(t)=UOcos(ω1t+φ),式中UO=2k2k3×m 。鉴相和滤波后,俯仰角误差输出电压UP和偏航角误差输出电压UY可用式(8)、(9)来表示。
式(8)、(9)中,Ks是滤波器的传递系数;Ku1是对角误差电压的放大系数;2πKsKu1UO为归一化后的×型坐标角误差解调斜率,φ 是目标在+字(高低-方位)坐标系中的角位置,φ-π/4是目标在俯仰-偏航坐标系中的角位置(它旋转45°),sin(φ-π/4)是俯仰坐标值,cos(φ-π/4)是偏航坐标值。
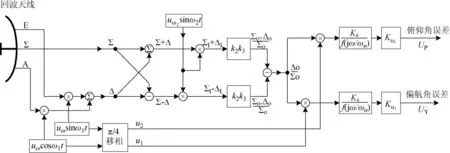
图4 双通道测角系统等效模型图

式(10)与(11)中,cosφ为方位坐标值;sinφ为高低坐标值;πUO是+字坐标角误差解调斜率。
把UO=2k2k3×m、m=uΔ/uΣ、uΔ=uω(uE2+uA2)1/2、φ=arctan-1(uE/uA)、uA≈k1uΣθA和uE≈k1uΣθE代入式(10)和(11),得到高低-方位坐标系下俯仰与偏航电压的另一种表达式。

式(12)和式(13)中,θE为目标偏离天线纵向轴的高低角度;θA为目标偏离天线纵向轴的方位角度;Ku=2πk1k2k3KsKu1uω为系统高低角或方位角的测角斜率。
3 结束语
本系统在微波上将单脉冲雷达天线输出的E信号和A 信号进行调制,并混合成Δ 信号,Δ 信号又与单脉冲雷达天线输出的∑信号叠加成(∑+Δ)和(∑-Δ)信号,使系统能用两个中放来处理目标的角信息,AGC 中放一方面放大(∑+Δ)和(∑-Δ)中频信号,另一方面又将(∑+Δ)和(∑-Δ)中频输出信号归一化成(∑+Δ)/∑和(∑-Δ)/∑信号,在作(∑+Δ)/∑-(∑-Δ)/∑运算后,用移了45°的调制基准源信号直接鉴相解出目标的偏离角电压。
测角是检测目标偏离雷达天线纵轴的程度,通过天线伺服控制系统控制回波天线转动,使雷达天线保持对准目标,由此构成一个回波天线的角度跟踪闭环系统(瞄准系统);其次角误差电压是导弹飞行过程中非常重要的角度信息,它可控制导弹按照既定的导引方程来进行飞行,由此构成导弹飞行过程的导引闭环系统(导引系统)。随着雷达天线和新型电子元器件的不断发展,测角技术还将会进一步得到提升。
[1] 承德宝.雷达原理[M].北京:国防工业出版社,2007:280-285.
[2] 穆虹,等.防空导弹雷达导引头设计[M].北京:宇航出版社,1996:72-89.
[3] 唐国富,等.飞航导弹雷达导引头[M].北京:宇航出版社,1991:28-43.
猜你喜欢
昆明医科大学学报(2021年4期)2021-07-23 01:21:56
航天电子对抗(2018年3期)2018-07-14 02:53:30
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
电子测试(2018年6期)2018-05-09 07:31:54
数学大世界(2018年1期)2018-04-12 05:39:03
中等数学(2017年2期)2017-06-01 12:21:50
测绘科学与工程(2016年6期)2016-04-17 06:51:25
电子设计工程(2015年16期)2015-02-27 12:07:56
雷达学报(2014年4期)2014-04-23 07:43:19
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28 12:21:31