
高空无人机载GPS/INS系统干扰效能及对策研究*
2013-03-23 08:56吴志建方胜良吴付祥
航天电子对抗 2013年2期
吴志建,方胜良,吴付祥
(1.解放军电子工程学院,安徽合肥230037;2.电子制约技术安徽省重点实验室安徽合肥230037)
0 引言
高空长航时“全球鹰”无人机高空、纵深的侦察能力,令无人机在现代战争中的地位明显提高,引起了各国军方的高度关注。如何遏制其作战效能的发挥是当前研究的一个重要课题。GPS/INS系统在高空长航时无人机自动完成从起飞、侦察到着陆的整个飞行过程中发挥着重要作用。因此本文从对抗无人机载GPS/INS系统的角度进行研究,并给出了对抗策略。
1 对GPS/INS系统干扰效能分析
1.1 GPS天线方向图
GPS接收机是上半球覆盖的,具有抑制仰角小于5°信号的能力。典型的GPS接收天线方向图如图1所示。
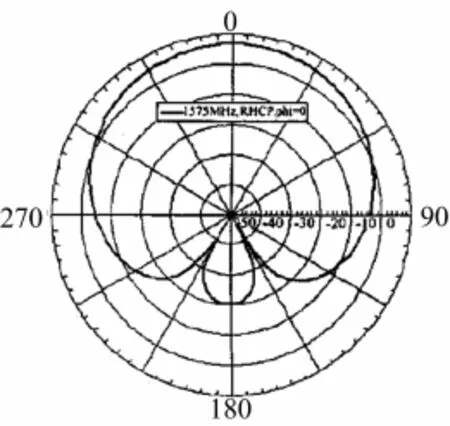
图1 典型的GPS接收机天线方向图
本文拟采用sinc函数来对GPS接收机天线进行仿真,仿真结果如图2所示。

图2 sinc函数模拟的GPS接收机天线方向图
1.2 GPS干扰方程
目前对GPS干扰的手段有升空干扰、星载GPS干扰以及地面GPS干扰。升空干扰技术主要采用机载、平流层飞艇载以及气球载GPS干扰机等实施升空干扰。星载GPS干扰主要用于远距离干扰敌方空中目标的GPS,以压制、转发卫星下行GPS信号,起到干扰、欺骗效果。地面GPS干扰技术是采用功率合成技术汇聚足够的干扰功率,组成强干扰压制,确保重点攻防方向GPS无法定位的技术。本文则针对目前高空无人机机载的GPS/INS系统的特点,重点研究升空压制式干扰对机载GPS系统的效能。
对GPS的压制式干扰就是通过干扰信号进入接收机后的强度高于GPS信号解扩的强度,从而使得接收机无法截获、跟踪GPS信号。在此以接收机输入端的干扰容限来衡量对GPS接收机干扰是否成功。

式中,So为GPS接收机输出端的信号强度;Jo为GPS接收机输出端的干扰信号强度;Gk为扩频处理增益;Kj为干扰容限,也可以理解为压制系数;Ls为系统损耗。
假设GPS干扰为全向天线,则GPS干扰方程为:

式中,Pj为干扰机发射功率,Gj为干扰机天线增益,Grj为GPS接收机在干扰机方向上的增益,Rt为GPS接收机与导航卫星之间的距离,Pt为导航卫星发射功率,Gt为导航卫星天线增益,Grs为GPS接收机在导航卫星方向上的增益,Rj为干扰机到GPS接收机之间的距离。
1.3 GPS干扰机的需求计算
GPS接收机是上半球覆盖的,具有抑制小于5°仰角信号的能力,所以对高空无人机载GPS/INS组合系统中的GPS干扰采用升空干扰的方式,如图3所示。

图3 对高空无人机载GPS干扰示意图
图3中仰角小于5°的区域为干扰机的不可配置区。根据干扰方程,定义:

Rj≤Ro区域为压制区,Rj>Ro区域为导航区,如图4所示。

图4 干扰压制区示意图
下文重点研究在确保一定飞行距离L的情况下,GPS/INS组合导航系统中GPS无法导航时,不同干扰机配置对干扰机的需求数量。具体平面示意图如图5所示。
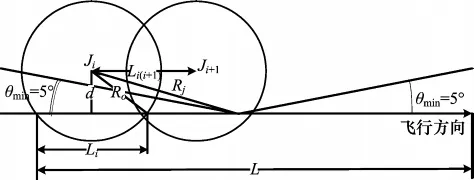
图5 对高空无人机载GPS干扰空间关系
图5中d为干扰机与飞机垂直方向的高度差,Li为一部干扰机对GPS干扰时的有效压制距离。要完成L距离上的有效压制,干扰机的配置需满足以下条件:
1)干扰机位于大于GPS仰角5°的范围内;
2)干扰机与飞机飞行方向的距离,即干扰机与飞机垂直方向的高度差小于最大压制距离Ro;
3)干扰机水平方向的配置小于或等于两干扰机有效压制距离之和的一半;
4)干扰机与GPS接收机之间满足可视要求。
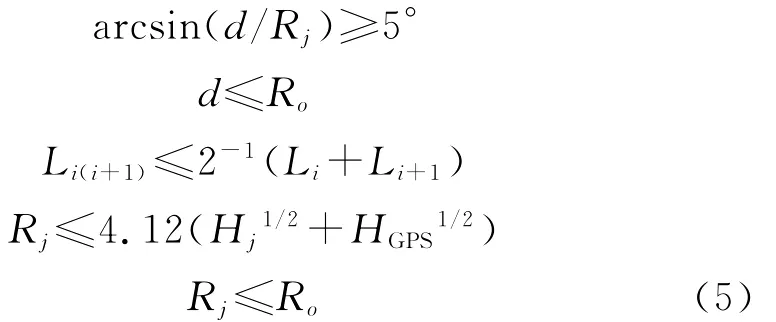
所以为压制机载GPS/INS组合导航系统一定距离L时GPS不能导航,所需要的干扰机数目N为:

条件为:
1.4 INS导航误差分析
GPS/INS组合导航系统是通过GPS的长期高精度和INS的短期高精度组合进行导航,以松耦合、紧耦合以及深度耦合等方式利用卡尔曼滤波将GPS的输出与INS输出相比较,使各种误差减少到最小,从而达到总的精度高于GPS或INS的目的。
压制式干扰的目的就是为了让GPS/INS组合导航系统失去GPS定位系统的调整作用,使其仅有惯性导航起作用,最终增加INS积累误差,偏移预定航线。飞机飞行速度为v,飞行航线长度为Rd,INS角误差漂移速度为σ°/s,则飞行方向角度的偏差为:

无人机的圆概率误差CEP为:

2 仿真实例
敌某型高空无人侦察机飞行高度19850m,飞行速度为635km/h,GPS接收天线最大增益为3d B,系统损耗2d B,C/A码调制带宽为2MHz,P码调制带宽为20MHz,码速率为50bit/s,INS偏移圆概率误差120m/20min;导航卫星轨道高度20200km,发射功率为26 W,天线增益为12dB;干扰机发射功率为4W,天线增益为0dB,干扰机之间距离等于两干扰机有效压制距离之和的一半,同一高度配置;飞机的圆概率误差为300m。不同高度差d时所需干扰机数量见表1、表2。
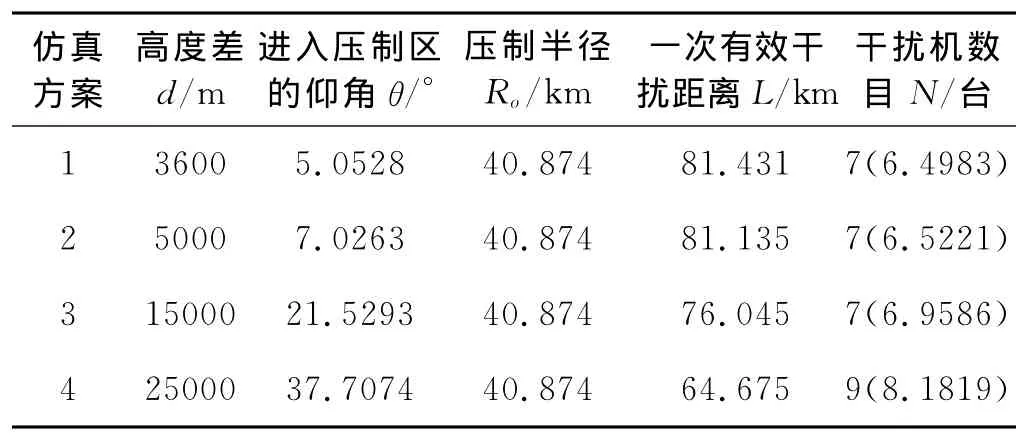
表1 干扰C/A码导航所需干扰机数目

表2 干扰P码导航所需干扰机数目
从表1可知,为使无人机侦察机航线的圆概率误差达到300m,如果干扰机高于无人机侦察机3600 m布置,所需要的干扰机数目为7台,并随着高度差的增加,干扰机的数目也随之增加;相比C/A码,P码的扩频处理增益增强了它的抗干扰能力,在高度差为1127m,仰角为5.0020°的临界值时就需要21台干扰机,当高度差为10000m时,增加至33台。
3 对抗策略
从上述仿真分析中不难得知,为了使高空无人机载平台航线的圆概率误差达到一定的数值,采用压制式干扰方式对GPS/INS系统进行干扰所需要的装备数量是巨大的,并且采用机载GPS干扰机、平流层飞艇载GPS干扰机以及气球载GPS干扰机对高空无人机载GPS/INS系统进行压制式干扰难度是相当大的,所以对抗高空无人机载GPS/INS系统,在加大对机载GPS系统进行干扰的同时,还要兼顾对机载INS系统的干扰或破坏,可采取以下方式来对抗高空无人机载GPS/INS系统:
1)对GPS/INS系统GPS接收机的瞬时高功率损坏。当GPS接收机的输入功率达到或超过10 W时,接收机的限幅管就会因高功率微波信号与接收机电子系统的耦合作用而损坏,使GPS接收机瘫痪。
2)对GPS/INS系统中INS敏感器件损坏加压制式干扰。对于一般的GPS接收机,其要求的最大的输入功率不超过-15dBW,否则会使接收设备的信号饱和,导致不能分辨真假,有用信息无法提取;如果同时采用高功率微波武器使INS敏感器件损坏,致使GPS、INS系统都不能正常工作,从而达到不能导航的目的。
3)对GPS/INS系统中INS敏感器件损坏加欺骗式干扰。采用高功率微波武器使INS系统损坏,在INS系统不能对GPS进行校正的情况下,对GPS采用欺骗式干扰,使GPS接收机接收错误的卫星导航数据,导致定位误差增加,达到对抗的目的。
4 结束语
本文在建立GPS干扰方程的基础上,针对GPS接收天线方向图特点,对GPS干扰的装备需求进行了计算,并进行了仿真分析,结果表明,对抗高空无人机载GPS/INS系统采用压制式干扰是可行的,并能取得很好的效果。从对GPS干扰装备的军事需求方面考虑,对高空无人机载GPS/INS系统的干扰,如能兼顾对INS系统的干扰或破坏,可在一定程度上减少对GPS干扰装备的需求。所以,多源、多方式干扰手段的有效结合可对高空无人机载GPS/INS系统起到很好的干扰作用。■
[1] 邵国培,曹志耀,何俊,等.电子对抗作战效能分析[M].北京:解放军出版社,1998.
[2] 雷武虎.卫星导航定位原理及干扰[M].北京:解放军出版社,2010.
[3] 任菁圃,吴卫凯.GPS电子干扰范围及效果分析[J].现代电子技术,2006(3):19-24.
[4] 周坤芳,李德武,周湘蓉.干扰环境下GPS/INS组合模式研究[J].中国惯性技术学报,2004,12(4):24-27.
[5] 谭显裕.GPS在导航战中的作用及其干扰对抗研究[J].现代防御技术,2001,29(3):42-47.
[6] 焦逊,陈永光,沈阳.对GPS接收机实施压制干扰的效能评估研究[J].航天电子对抗,2003(3):11-14.
[7] 周坤芳,杨燕,王桂峰.干扰对GPS接收机伪距测量精度的影响[J].电子对抗技术,2005,20(3):25-28.
猜你喜欢
环球时报(2022-02-28)2022-02-28
航天电子对抗(2019年4期)2019-12-04
小天使·一年级语数英综合(2019年2期)2019-01-10
小天使·一年级语数英综合(2018年11期)2018-11-23
小学阅读指南·低年级版(2018年5期)2018-11-02
无人机(2018年1期)2018-07-05
北京航空航天大学学报(2017年9期)2017-12-18
军事运筹与系统工程(2016年4期)2016-07-10
现代兵器(2016年6期)2016-06-25
弹箭与制导学报(2015年1期)2015-03-11

- 航天电子对抗的其它文章
- 基于灰色信息融合的电磁环境复杂度分级方法
- 复杂电磁环境问题的产生与研究