
1 030/1 090 MHz 频谱的共享与干扰问题综述
2013-03-18 08:10王洪
电讯技术 2013年1期
王 洪
(电子科技大学 电子工程学院, 成都611731)
1 引 言
航空工业的发展为无线电技术的应用开辟了广阔的空间,如飞行器的导航、空中交通管制、地空数据通信、飞行器避撞、测距和着陆等,这些系统均建立在无线电电波的基础之上。电磁波传输数据和探测信息具有快速、可靠和距离远等优点,但也存在电磁波相互之间的干扰问题。随着航空流量和容量的高速增长,飞行器数量的增加和地面无线电设备的广泛使用,无线电技术的应用呈现多样化的趋势,不同电子系统发射的各种频段的电磁波共存于相同的空间,使某些区域尤其是机场附近的电磁环境十分复杂,电子系统之间的相互干扰日趋严重。
在这些电子系统中,1 030/1 090 MHz频率的应用尤为广泛。电子系统按询问和应答的方式工作,以1 030 MHz为上行频率,1 090 MHz为下行频率,信号3 dB带宽一般在±3 MHz以内,例如,A/C 模式和S 模式就是建立在这两个频点的地空数据链[1]。使用1 030/1 090 MHz频率的电子系统包括二次监视雷达、空中防撞系统、多点定位系统、自动广播相关监视系统、敌我识别器和测距仪等。多种系统的共享带来一系列问题:各系统的运行是否存在风险? 现有的1 030/1 090 MHz信号环境如何? 未来可能是什么状况? 频谱拥塞和干扰的程度如何? 如何规避干扰和缓解拥塞?怎样评估ADS-B 等新系统大规模应用后的性能和影响?等等。围绕这些问题,欧美发达国家开展了长期的频谱监测工作,对未来10 ~30 年新系统应用的影响和性能进行了可信的评估,国际民航组织(ICAO)、美国联邦航空局(FAA)和欧控等权威民航组织合作,对世界上最繁忙的机场,如法兰克福机场、肯尼迪机场等进行了全面的监测和评估[2-3]。美国评估的结果是, 到2020 年和2035年其1 090 MHz频率将不能满足需要,因此其ADS-B同时采用了 1090ES(Extended Squitter)格式和978 MHz的UAT(Universal Access Transceiver)格式。我国在该领域的研究和试验还是空白,对新系统应用的计划和实施标准的决策缺乏科学依据,随着航空流量的快速增长, 空中交通密度的增加,1 030/1 090 MHz频谱共享的问题将逐渐暴露,影响航空安全和运行效率。
本文是研究1 030/1 090 MHz频谱监测与评估的论文之一,着重讨论有哪些使用该频点的电子系统,介绍了各系统的基本运行方式,使用该频点的频度如何,并分析了1 030/1 090 MHz应用中的各种干扰形式。
2 主要电子系统
2.1 二次监视雷达系统
二次监视雷达或二次雷达[4-5]是当前民用航空空中交通管制的主要监视设备,由地面雷达发射1 030 MHz的询问信号对飞机进行询问,机载应答机在收到询问信号后加载编码或高度等信息后发射应答信号。不同于一次雷达接收的信号是目标的回波信号,系统有两次收发,因此称为二次雷达。二次雷达分为常规体制和单脉冲体制,询问信号有6 种格式,询问信号包含P1、P2、P3 3 个脉冲,不同格式的P1 ~P3 脉冲间隔不同,如表1 所示,对应6 种询问格式,应答信号的数据有不同的含义。其中Mode A/C 为民用,Mode 3/A 为军民共用。由于Mode A/C只有4 096 种编码,不能为每架飞行器分配唯一的编码,同时,A/C 模式没有选择性询问和应答功能,随着目标数量对增加,干扰问题十分严重。在A/C模式之后发展了S 模式数据链[6],目标编码增加到24 位,通信能力显著提高,且可以对特定目标点名呼叫,选择性询问和应答,从体制上降低了发生干扰的概率。
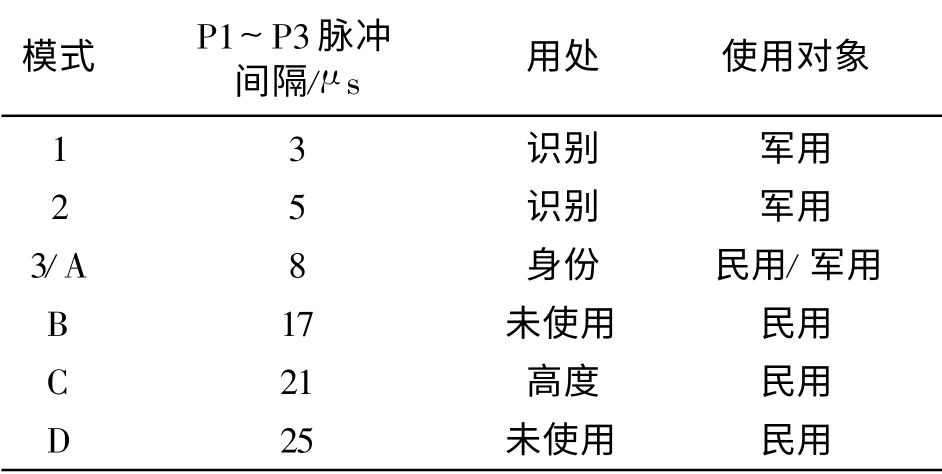
表1 SSR询问信号制式Table 1 Signal modes of SSR interrogator
那么,二次雷达使用1 030/1 090 MHz频率的程度如何呢? 这里以雷声公司的Conder series 300 二次雷达为例进行讨论。该雷达的探测距离大于460 km,探测范围内飞机发射的应答信号都可能收到,发射信号脉冲重复频率50 ~450 Hz,主波束3 dB宽度2.4°,天线转速5 ~15 r/min,360°扫描范围内可同时监视1 400 个目标,主波束内可同时监测32 个目标,检测概率均高于99%, 和通道旁瓣抑制比28 dB,差通道旁瓣抑制比26 dB。因此,单部二次雷达每秒发射的1 030 MHz询问信号可达450 次,其旁瓣信号在距雷达安装位置较近的机场也可能被收到。应答信号的数量远多于询问信号,按主波束监测32 个目标计算,单部雷达的最大应答次数可进行估算,这里假定为A/C 模式,没有选择呼叫和应答功能,而是全部应答,PRI 为应答的重复频率,Δt 是目标被雷达主波束照射到驻留时间,

式中, vr 单位为r/min, 取最小值5 r/min时, Δt =0.08 s。设主波束内监视的最大目标数为N,脉冲重复频率为fp,则有最大应答次数Rmax=N×fp×Δt=1 152次。
A/C 模式应答信号时长为20.3 μs,1 152次A/C模式应答信号总长度为0.023 μs,均出现在驻留时间0.08 s 内,而实际的信号并不是邻接的,其重叠概率更大。这是假定目标全部为A/C 模式的情况,若应答信号为S 模式,重叠概率因选择性呼叫而减少,但S模式全呼叫时,重叠概率也较高。实际应用中,监视范围内目标数量达不到1 400个,主波束内目标也达不到32 个,信号密度会有所减少。由于雷达作用距离超过460 km,因此必然收到其他询问机的应答信号,产生异步干扰(FRUIT),Conder series 300 在主波束内可承受的FRUIT 干扰不超过11 600次/秒。
二次雷达的技术已非常成熟,采用了窄波束询问、旁瓣抑制、编码询问、全呼应答控制和飞行管制等技术来降低发生干扰的概率, 但其他使用1 090 MHz频率的电子系统,却不可避免要受到高密度的二次雷达应答信号的干扰。
2.2 自动广播相关监视系统
自动广播相关监视ADS-B 系统包括ADS-B IN和ADS-B OUT 服务,未来将替代二次监视雷达成为飞行器监视的主要手段。ADS-B 通过机载GPS 接收机定位其经纬度,再加载飞机的编码、高度、速度、飞行意图和其他飞行数据后,以Mode S extended squitter 格式向地面广播。下行频率1 090 MHz,广播频率0.5 ~6 Hz。ADS-B 是美国国家航空计划NextGen的重要组成部分,FAA 自2006 年开始执行ADS-B 第一阶段的计划,目前已进入第二个阶段,已在部分航线上验证,将于2015 年起执行第三阶段的计划,全面使用ADS-B 系统[7]。欧洲也将在2015 年全空域使用ADS-B。我国的近期规划主要开展ADS-B 的运行试验与验证,实现基本覆盖-高空主要航路单重覆盖、终端区多重覆盖以及在多个西部无监视机场实现场面覆盖,目前已在成都-拉萨、成都-九寨沟等航线上试用[8],2030 年之前的中期和远期规划也已出台。美国在实施ADS-B 1090ES 数据链的同时,推出了978 MHz的UAT 数据链,一方面是由于ADSB 无法满足飞行情报服务(Flight Information Services-Broadcast,FIS-B)和空中交通情报服务(Traffic Information Services-Broadcast,TIS-B)的上行广播电文需求,另一重要原因就是为了减轻1 090 MHz频点的拥塞,飞行高度在5 486 m以下的通用航空飞行器将主要采用UAT 数据链。中国国家航空局的近期和远期规划中没有提及UAT 数据链,ADS-B 将是我国远期规划的主要监视手段[9]。ADS-B 对其他系统的干扰由目标数量、广播频率和作用距离决定,但受到1 090 MHz同频干扰时,却没有二次雷达的多种干扰抑制手段。
2.3 多点定位系统
多点定位(Multilateration)系统[10]是实现ASMGCS(Advanced Surface Movement Guidance and Control System)机场场面监视的核心技术,包括多部接收机构成的远端站和数据处理中心站两大部分。接收机在获得目标的到达时间TOA 后,与解码数据一起发往中心站,中心站根据时标和编码匹配目标,然后按照双曲线/面定位的原理,解算出飞机的位置。多点定位系统无需加载新的机载设备,而是借助现有的二次雷达应答信号、ADS-B 广播信号和TCAS信号监视飞机,多点定位是继二次雷达之后的重要监视手段, 在ADS-B 全面实行之前将发挥重要作用,在ADS-B 实行只有也将是重要的增强监视手段之一。GPS 卫星属于美国,从国家安全角度来看,多点定位系统对我国具有更加重要的意义。
多点定位系统主要接收信号,在系统定标、同步误差校正和触发受严重干扰的目标应答时才发射询问信号,因此对1 030/1 090 MHz频点信号密度的增加影响较小。但是,ICAO 要求多点定位系统同时监视的目标数量大于500 个, 场面监视精度优于7.5 m,检测概率大于99.9%,因此,多点定位系统对1 090 MHz信号受干扰的程度十分敏感,严重的干扰可能导致多点定位系统失效。
2.4 空中防撞系统
空中防撞系统(TCAS)[11]是避免空中飞机相撞的机载电子系统,在欧洲称为ACAS(Airborne Collision Avoidance System),主要由询问器、应答机、收发机和计算机组成。TCAS 的询问器发出询问信号,当其他飞机的应答器接收到询问信号时,会发射应答信号,由此确定飞机的航向和高度,使飞机之间可以显示相互之间的距离间隔和高度,为驾驶员提供信息和警告。TCAS 使用二次雷达相同的应答信号格式,但独立于地面设备。目前广泛使用的是第二代空中防撞系统(TCAS II),TCAS II 用声音及显示警告飞行员,称为Resolution Advisory,还可用语音指示避撞的动作。TCAS 的监视范围一般为前方30 n mile,上、下方3 000 m,为了减少无线电干扰,对发射功率作了控制,侧面和后方的监视距离较小。TCAS 可跟踪 45 架 飞 机, 询 问 频 率 是1 Hz, 因 此, 对1 030/1 090 MHz频点的占用主要取决于目标数量。在TCAS II 之后提出的TCAS III 和TCAS IV 对防撞系统的功能作了增强,但TCAS IV 已被ADS-B 替代,而TCAS III 也没有付诸应用。最新的TCAS 设备在性能上已有所提高, 如Honeywell 的第三代处理器TPA-100,可跟踪100 n mile外的目标,并接收ADS-B信号。
2.5 敌我识别系统
敌我识别器(Identification of Friend or Foe,IFF)是一种身份识别系统,用于区分敌方、友方和己方飞行器,也是一种二次雷达,按照询问和应答的方式工作,使用的上下行频率也是1 030/1 090 MHz。但数据链格式采用表1 的Mode 1、Mode 2、Mode 3/A 和Mode 4,其中Mode 3/A 为军民共用,Mode 4 为加密格式。目前,北约集团主要应用的是MKX II 敌我识别系统[12-13],在1999 年后,各国陆续将S 模式引入新开发的敌我识别系统,也称为Mode 5,是加密格式的S 模式,2004 年北约完成了Mode 5 的统一设计和原理样机研制。Mode 5 有4 级工作模式, 分别为Level 1、Level 2、Level 3 和Level 4,不仅具有改进的询问/应答识别方式,还增加了态势感知、选址询问、数据传输以及空对地识别等功能。由于IFF 是二次雷达的工作模式,因此,民航二次监视雷达存在的干扰问题,在IFF 系统中也同样存在。
2.6 其他
ADS-B 相近的还有寻址式自动广播相关监视(Automatic Dependent Surveillance-Addressed,ADS-A),也称为合约式自动广播相关监视(Automatic Dependent Surveillance-Contract,ADS-C),通过点对点寻址签署了数据接收协议的地面接收机。ADS-A 主要应用在FANS(Future Air Navigation System)系统、海洋和偏远的内陆地区等。
ADS-B 不仅用于空中目标的监视,也被扩展到地面目标的监视。国外的公司已研制出车载ADS-B收发系统,如法国Thales 公司研制的基于ADS-B 的车辆跟踪器(Vehicle Tracking)MOSQUITO。北京航通公司也研制出了ADS-B 车载应答机ABAV6215。地面目标发射的定位信号将进一步增加1 030/1 090 MHz频点的拥挤程度,而在机场这样的重点区域,信号密集程度非常高。
测距仪(DME)是在IFF 基础上发展起来的测距设备,用于测量飞行器和导航台之间的斜距,通常与仪表着陆系统结合在一起使用。与二次雷达相反,DME 由机载设备发射询问信号,地面设备发射应答信号。询问信号频率为1 025 ~1 150 MHz,应答频率为963 ~1 213 MHz,均划分为126 个信道,应答频率与询问频率始终相差63 MHz。因此,DME 电子系统仍然占用了1 030/1 090 MHz频率,其126 个信道的信号与1 030/1 090 MHz频点距离较近,在滤波器通带内的信号直接干扰了该频点的正常使用。
此外,交通信息广播服务系统(TIS-B)是未来可能付诸应用的一种交通信息广播服务系统,该系统基于二次雷达二次雷达的询问与应答模式来探测和定位飞行器, 然后通过ADS-B GBT(Ground Based Transiceivers)发送给装有ADS-B 设备的飞行器。因此,TIS-B 系统也在使用1 030/1 090 MHz频率。
3 干扰分析
从以上分析可以看到,多种电子系统均在使用1 030/1 090 MHz频谱,当信号出现在同样的空域时,接收机将收到来自其他系统的发射信号,信号间容易相互混叠,产生漏检或虚警,导致系统工作不稳定。不仅如此,信号在空间传播过程中,受地形及建筑物影响,产生多径效应,非直达信号也会对有用信号带来干扰。下面分析以下几类主要的干扰形式[4,14]。
(1)异步干扰
异步干扰(False Replies Unsynchronized with Interrogator Transmissions,FRUIT)即应答接收机收到其他询问机询问引起的应答。随着空中和地面目标的增加,各种电子系统共用1 090 MHz下行频率,应答机收到FRUIT 干扰的频率很高,如果连续几次收到同一目标的FRUIT 信号,容易判决为一个新的目标出现,导致虚警的产生。FRUIT 是主要的干扰形式,在二次雷达系统中要求承受的FRUIT 干扰为每秒5 000,而雷声公司最新的二次雷达在主波束内可承受的FRUIT 干扰已提高至11 600次/秒,而多点定位系统的设计目标则达到40 000次/秒。
(2)同步窜扰(Synchronous Garble)
一部询问机引起多部应答机同时应答,应答脉冲组相互重叠,且脉冲位置相互占用的应答。混扰是不同应答机的射频信号在空间合成,主要发生在距应答机斜距相当的目标之间。同步窜扰的抑制尤为困难,因为信号在时域、频率均重叠在一起,一般用阵列天线接收,利用信号空间方向的不同来分离混叠的信号。
(3)窜扰(Garble)[15]
也称为交织应答(Interleave reply),与混扰的机理相似,应答脉冲组相互重叠,但脉冲位置不相互占用的应答。对这种干扰,最简单的方法就是增加询问次数,期望多次应答信号中有未受干扰的应答,但这种方法又会增加对其他应答机的干扰。
(4)反射假目标(Ghost)
应答信号受地物反射,尤其是大型建筑物和地形的反射引起的假目标,这种干扰与真实目标很难区分,并导致测距的错误。
(5)多径(Multipath)
从多种路径达到接收机的信号,表现为信号之后有较长的拖尾,部分脉冲变形,数据解码出现错误。
(6)标锁定(Target Lockout)
当两个询问机询问同一目标的时间很近时,由于应答机在响应期间,不能应答其他应答机的询问,这样后一部询问机收到的是另一部询问机对应的应答信号,应答结果及时间基准不同,导致错误的发生。
以上是主要的干扰形式,对不同的电子系统还有特定的干扰形式,如二次监视雷达中存在的二次环绕和群俘获问题。
4 结束语
1 030/1 090 MHz频谱在民用及军用航空领域有多种应用,这些电子系统同时工作,共享该频点,必然造成相互的干扰,这种干扰随目标数量的增加而增强,并成为限制飞行器数量、影响航空系统正常运行的因素之一。除该频点以外,在1 030/1 090 MHz频点附近的频段也广泛使用,如GSM 个人移动通信的上下频率为890 ~915 MHz, 下行频率为935 ~960 MHz,大量的手机发射信号及其频谱泄漏信号也可能干扰航空电子系统的正常工作,因此,在乘坐飞机的过程中,乘客使用手机及无线设备仍受到限制。本文概述了1 030/1 090 MHz频点在二次雷达、ADSB、多点定位、TCAS、IFF 等系统中的使用状况,对信号的主要干扰形式进行了分析和介绍。因此,无论是保障现有系统的正常工作,还是论证未来ADS-B等新系统大规模应用的可行性, 都有必要掌握1 030/1 090 MHz 信号的环境和承载能力, 对1 030/1 090 MHz频谱开展监测试验和评估试验,为新系统的规划和标准的制定提供科学的决策依据。1 030/1 090 MHz频点的监测方法、监测数据分析方法、评估建模技术、应用系统性能评估方法、拥塞规避措施、干扰背景下的增强接收技术和抗干扰技术等将在后续的论文中进一步分析和阐述。
[1] Annex 10 to the convention on international civil aviation,Surveillance radar and collision avoidance systems[ S] .
[ 2] Chludzinski B J, Drumm A C, Elder T R,et al.Lincoln Laboratory 1030/1090 MHz Monitoring March-June 2010[ R]//ATC-390.Lexington:MIT Lincoln Laboratory, 2011.
[ 3] Panken A D, Harman W H, etc.Measurements of the 1030 and 1090 MHz Environments at JFK International Airport.[ R] .Springfield:Lincoln Laboratory, 2012.
[4] ICAO.Manual on the secondary surveillance radar system[M] .Brussels:ICAO, 2004.
[ 5] MH/T 4010-2006,空中交通管制二次监视雷达设备技术规范[ S] .
MH/T 4010-2006, Technical standards for ATC secondary surveillance radar[S] .(in Chinese)
[ 6] 王洪,刘昌忠, 汪学刚.二次雷达S 模式综述[ J] .电讯技术,2008, 48(7):113-118.
WANG Hong, LIU Chang-zhong, WANG Xue-gang.Mode S for secondary surveillance radar(SSR):an introduction and overview[ J] .Telecommunication Engineering, 2008,48(7):113-118.(in Chinese)
[7] Arbuckle P D.U.S.Activities in ADS-B Systems Implementation[C]// Proceedings of 2011 Tyrrhenian International Workshop on Digital Communication-Enhanced Surveillance of Aircraft and Vehicles.Capri,Italy:IEEE,2011:41-46.
[8] 康南, 刘永刚.ADS-B 在我国的应用与发展[J] .中国民用航空, 2011, 131(3):36-38.
KANG Nan, LIU Yong-gang.Application and development of ADS-B technology in China[ J] .China Aviation, 2011, 131(3):36-38.(in Chinese)
[9] 中国民用航空局.中国民航监视技术应用政策[ R] .北京:中国民用航空局,2010.
CAAC.Policy of aviationsurveillance techniques of China[R] .Beijing:Civil Aviation Adm inistration of China, 2010.(in Chinese)
[10] 吕小平.MDS 技术在我国民用航空的应用探讨[J] .空中交通管理, 2006,23(9):4-11.
LV Xiao-ping.Discussions on the app lications of MDS technology in civil China aviation[ J] .Air Traffic Management,2006,23(9):4-11.(in Chinese)
[11] FAA.Introduction to TCAS II[M] .Washington:FAA, 2000.
[12] 曹晓蓓.综合敌我识别方法研究[ J] .电讯技术, 2011,51(12):1-3.
CAO Xiao-bei.Study on Integrated IFF Technology[ J] .Telecommunication Engineering, 2011, 51(12):1 -3.(in Chinese)
[13] 兰鹏.S 模式与军用敌我识别[ J] .电讯技术,2006,46(3):139-143.
LAN Peng,Mode S and Military IFF[J] .Telecommunication Engineering,2006,46(3):19-143.(in Chinese)
[14] 钟琼, 吴援明, 黄成芳.二次雷达系统干扰等问题的解决方法[J] .电讯技术,2005,45(2):138-142.
ZHONG Qiong, WU Yuan-ming, HUANG Cheng-fang.Solutions to Some Problems in a Secondary Surveillance Radar System[ J] .Telecommunication Engineering, 2005, 45(2):138-142.(in Chinese)
[15] 王法灏, 王运锋.二次雷达同步窜扰分析及解决方法[ J] .电讯技术,2009,49(5):14-16.
WANG Fa-hao, WANG Yun-feng.Analysis of Garble in Secondary Surveillance Radar(SSR)and its Solutions[ J] .Telecommunication Engineering,2009,49(5):14-16.(in Chinese)
猜你喜欢
空军工程大学学报(2021年2期)2021-05-29
航天器工程(2021年2期)2021-04-28
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
百科探秘·航空航天(2018年11期)2018-11-29
电子制作(2017年23期)2017-02-02
火控雷达技术(2016年3期)2016-02-06
电信工程技术与标准化(2015年10期)2015-12-22
百科探秘·航空航天(2015年4期)2015-11-07
遥测遥控(2015年5期)2015-04-23
