
基于DSP/BIOS的地铁牵引控制系统研究
2013-03-16 06:23郭启明
湖南工程学院学报(自然科学版) 2013年1期
周 翀,郭启明
(1.海军工程大学,武汉 430032;2.湘潭电机重型装备股份有限公司,车辆研究所,湘潭 411101;3.湘潭电机股份有限公司,湘潭 411101)
基于DSP/BIOS的地铁牵引控制系统研究
周 翀1,2,郭启明3
(1.海军工程大学,武汉 430032;2.湘潭电机重型装备股份有限公司,车辆研究所,湘潭 411101;3.湘潭电机股份有限公司,湘潭 411101)
阐述了基于DSP/BIOS多任务环境下的地铁牵引控制系统的研究开发.地铁牵引控制系统实时性强,在控制芯片中嵌入BIOS内核,对系统中的各项任务进行分析分配,有效利用资源,能够充分发挥BIOS多任务并发处理,高效快速的处理能力,满足了系统要求.实验表明,系统能够正常稳定的工作.
DSP/BIOS;多任务;地铁牵引控制系统
目前,各国城市轨道交通车辆传动系统的发展方向是交流化、网络化和智能化.我国在引进国外高端技术的同时,也在大力发展具有自主知识产权的交流传动系统,力图打破国外的技术封锁.现代化的轨道交通交流调速系统中都包含一个或多个高性能的CPU处理芯片.
近年来,嵌入式实时操作系统技术得到了长足的发展,趋于成熟.由于嵌入式实时操作系统具有良好的可开发性,因此其在工控领域得到了越来越广泛的运用.本文以TMSF28335为核心处理器,引入TI公司为DSP开发提供的嵌入式操作系统DSP/BIOS的多任务调度机制,构建了地铁牵引调速控制系统.整个系统分为几大任务块,按照预先设定的优先级并行执行.与使用传统软件开发模式相比,本文采用的DSP/BIOS的多任务调度机制软件开发模式提高了DSP硬件资源利用率,代码具有兼容性、继承性和可移植性强等特点,整个软件易于开发和维护.[1]
1 DSP/BIOS实时操作系统
DSP/BIOS是一个功能丰富、可扩展、可裁剪的高级实时式操作系统,主要用于相对复杂的应用程序,特别适用于需要多线程安排及同步、主机与目标机之间需要通信以及系统实时检测要求高的应用系统.
DSP/BIOS提供了可超前的多线程、硬件抽象化控制和实时分析工具,用户可方便且直观地使用.在开发实时多任务的系统中,DSP/BIOS允许将用户程序划分为线程的集合,不同的线程具有不同的优先级运行在单一的CPU上进行各种形式的交互.
DSP/BIOS支持四种类型的线程:硬件中断(HWI),软件中断(SWI),任务(TSK),及后台线程.DSP/BIOS系统容许多个线程任务的并发处理,而各个任务线程之间通过同步、通信、数据交换等进行协调.这种机制使得应用程序可维护性得到了提高,并且提供了更方便、更高级的调试手段,能够充分发挥DSP微处理器的快速运算能力,满足交流调速系统响应的实时要求.
2 地铁牵引调速控制系统
2.1 系统组成
地铁牵引调速控制系统(VVVF)是城市轨道交通车辆的核心控制部件,该系统主要完成如下功能:
(1)交流异步电机的牵引和制动控制;
(2)电机运行状态的实时监测和显示;
(3)功率组件(IGBT)等部件状态的检测和故障显示;
(4)VVVF控制逻辑和保护功能的实现;
(5)与列车其他控制单元的通讯.
一个地铁牵引调速控制系统包含以下七个模块:电源模块、DSP模块、传感器测量模块、开关量输入模块、开关量输出模块、编码器输入模块及监控与通讯模块.各模块之间通过VEM总线连接,具体结构见图1.

图1 地铁牵引调速控制系统组成
在图1中,电源模块负责给其他模块提供稳定的直流电源;传感器测量模块采集牵引的三相电流值、母线电压电流值等必需的系统参数并进行相应的放大和滤波等数据前期处理;开关量输入模块是系统数字量输入通道,相关控制信号如牵引制动信号、前进方向信号等由此模块输入;开关量输出模块负责输出系统的数字开关控制指令,控制外部的断路器、继电器等器件的闭合和断开;编码器输入模块根据输入的速度传感器脉冲信号,进行电机转速的计算,同时也接受牵引和制动时的给定量信号;监控与通讯模块实现系统与列车其他系统的网络通讯,同时提供调试时人机交互指令和数据传输通道等功能;DSP模块负责实现电机的控制算法,并根据总线传来的其他各模块采集得到的信息进行逻辑判断,决定当前系统的工作状态.[2]
2.2 基于TMS320F28335的DSP模块
地铁牵引调速控制系统的核心是DSP模块.DSP模块CPU采用TI公司具有32位浮点运算功能的TMS320F28335芯片作为系统CPU.该处理器具有先进的多总线结构和改进的哈佛结构,片内包含512KB Flash存储器和68KB Ram存储器,工作电源为1.9V内核和3.3V外设,处理速度快,功耗低.该处理器是整个地铁牵引控制系统的核心,其主要功能包括:电机控制、总线仲裁与管理、整个系统的功能管理以及通讯信息管理.系统中,DSP时钟频率设为100MHz.
3 基于DSP/BIOS的软件结构
DSP/BIOS程序设计是指通过使用DSP/BIOS的组件、API函数和分析工具等功能来完成程序设计.它有两个特点,一是所有与硬件相关的操作都必须借助其本身提供的函数完成,避免直接控制硬件资源;二是程序交由BIOS内核控制,按照任务调度优先级执行.[3]
在交流变频调速系统(VVVF)的平台上,进行BIOS嵌入式内核的软件编制,首先是对BIOS配置文件进行设置.该设置包含了对内存进行管理、合理安排中断向量表、对系统进行实时监测、规划各线程时间安排,进行线程调度等功能.软件整体结构如图2所示.
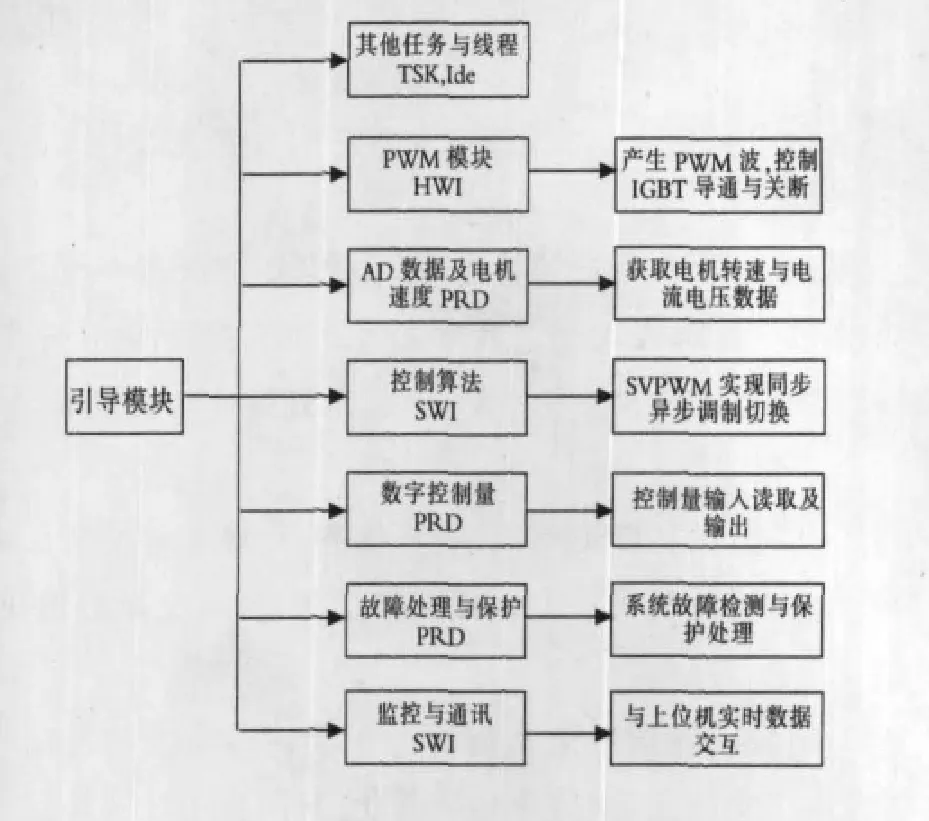
图2 软件结构组成
首先,安排硬件中断线程(HWI).硬件中断线程的执行有严格的实时性,而且执行时间短,与外部设备密切相关.在本系统中,由于电机控制用的PWM波采用DSP外设EPWM模块产生,属于DSP外设管理,因此实时性要求比较高.鉴于此,软件将该部分放在硬件中断中.根据28335的芯片外设结构,该中断属于外设PIE中断.在硬件中断管理器下,找到PIE中断,选择PIE_INT3_1,在其属性中设定中断执行函数,在函数体中加入SVPWM波产生的语句,这样系统会在PWM产生中断时,进入到此中断函数中更新电机控制用的PWM输出波形.[4]
其次,安排软件中断线程(SWI).所有的软件中断都是通过DSP/BIOS内核的API调用来启动的.软件中断的优先级低于硬件中断,但是高于任务和后台线程.同时每个软件中断对象也可设置1-15的优先级.中断会按照严格的优先级顺序来执行,相同优先级的中断会按照"先来先执行"的原则来安排的.[5]在本系统中,将控制算法放在软件中断中执行,一是为了保证PWM波输出的实时性,缩短硬件中断的中断延时,可以让下一次的硬件中断抢占.减少了中断的潜伏期,提高响应实时性请求的能力.二是因为控制算法中需要和其他的任务线程进行数据共享,比如电机运行参数等,这些数据的处理及运算均需要一定的时间,不适合用在实时性强的硬件终端中.系统中采用一个软件中断(SWI)对象EPWM1_SWI执行上述内容,出了在其中断函数中加入相关程序语句,还要在其属性中设定软件中断的邮箱参数、优先级等其他属性,具体设置办法请参考SWI的API函数.
除了控制算法,与上位机之间的监控和通讯,也设定为软件中断(PRD_swi).为了便于程序调试需要,软件为这个中断设置了一个1位的信号量,系统可以利用这个信号量有条件的启动该中断.
最后安排周期函数(PRD).周期函数是一种特殊的软件中断.所有的PRD函数都属于软件中断的同一优先级,不能互相抢占.需要周期性或在固定的时间间隔内完成处理任务.[6]在本系统中,AD数据转换即采集电流电压参数、电机转速等数据设定为8K采样速度.系统中的数字控制量及状态转换等程序,由于数据不会出现短时间突变,故不需要很高的处理频率,因此设定为100ms的定时中断.根据上述需要,软件在周期函数管理器下,创建两个PRD对象,设定不同的定时周期,在定时函数的属性中编写实现各个任务的函数体:数据更新任务函数Data_PRD,状态故障诊断任务函数Error_PRD.[7]
各项线程配置完成后,编制主函数完成系统中需要用到的各个模块的初始化,以及创建必要的全局对象.与传统的软件编程方式相比,基于BIOS编制的主程序,在完成对系统时钟、外设等地初始化后,不需要设置死循环等待中断,而是将程序控制权交给BIOS内核.BIOS内核根据前述的配置文件自动启动中断以及进行相应的中断处理.
BIOS内核提供了实时分析工具,在不需要停止处理器的运行的同时可方便地观测数据,更加直观.图3所示为整个软件编制完成后实际运行时各个线程执行情况.从图3中可以看出,各个线程都得到了充分的时间段,同时更高优先级的线程执行得到了保证,例如具有高优先级的Data_PRD抢占了完成低优先级的PRD_swi,从而保证了系统采样的准确性和实时性.运行情况表明,程序满足了设计要求.

图3 线程运行时间段分配
4 结束语
本文首先搭建了地铁牵引调速控制系统,分析了系统的组成和功能,接着利用DSP/BIOS的多任务调度机制软件开发了整套控制软件,重点介绍了该软件的结构组成.该软件编制方法能够提高DSP硬件资源利用率,同时代码具有兼容性、继承性和可移植性强等特点,并且易于开发和维护.试验表明,整个系统能够在满足实时性的条件下正常稳定的工作.
[1]许大中,贺益康.电机控制(第二版)[M].浙江大学出版社,2002:2-3.
[2]陈伯时,陈敏逊.交流调速系统[M].机械工业出版社,1998:1-4.
[3]高景德,王祥布,李发海,等.交流电机及其系统的分析[M].北京:清华大学出版社,1993:15-17.
[4]高景德,王祥布,李发海,等.交流电机及其系统的分析[M].北京:清华大学出版社,1993:15-17.
[5]胡崇岳.现代交流调速技术[M].机械工业出版社,1999:28-29.
[6]王 勇.矩阵变换器空间矢量调制、系统集成及应用研究[D].浙江大学博士学位论文,2005:1-3.
[7]黄科元.矩阵变换器空间矢量调制及应用研究[D].浙江大学博士学位论文,2004:1-5.
The Metro Traction Control System Based on DSP/BIOS
ZHOU Chong1,2,GUO Qi-ming3
(1.Naval University of Engineering,Wuhan 430032,China;2.Xiangtan Electric Manufacturing CO.,LTD.,Vehicle Research Institute,Xiangtan 411101,China;3.Xiangtan Electric Manufacturing CO.,LTD.,Xiangtan 411101,China)
Based on the DSP/BIOS,the research and development of metro traction control system in the multi-task environment is introduced.Traction control system real-time,the control chip embedded in the BIOS kernel,the system in the various tasks of distribution and effective use of resources can play an important role in the BIOS multitasking concurrent processing and improve the efficient processing capacity,which meets the requirement of the system.Experimental results show that the system can work normally and steadily.
DSP/BIOS;multi-task;metro traction contool system
TK417+.4;TM3
A
1671-119X(2013)01-0009-03
2012-11-25
周 翀(1981-),男,工程师:研究方向:电气工程.
猜你喜欢
高技术通讯(2021年3期)2021-06-09
网络安全技术与应用(2020年1期)2020-01-07
时代英语·高二(2017年4期)2017-08-11
解放军健康(2017年5期)2017-08-01
北京航空航天大学学报(2017年12期)2017-04-23
环球市场(2017年36期)2017-03-09
铁路通信信号工程技术(2014年5期)2014-02-28
赤峰学院学报·自然科学版(2012年19期)2012-10-14
微处理机(2012年4期)2012-06-13
杭州电子科技大学学报(自然科学版)(2010年5期)2010-01-08