
基于MATLAB的球面干涉仪图像处理系统设计*
2013-03-11 05:48兰明强詹明媚
光学仪器 2013年1期
兰明强,林 健,王 敏,詹明媚
(福建师范大学 物理与光电信息科技学院 医学光电科学与技术教育部重点实验室,福建 福州 350007)
引 言
干涉仪以其高的测量精度在现代高科技中扮演着重要的角色,而且由于其非接触无损在线检测使其在光学镜片加工车间中更具有优越性。随着目前电子产品对光学元件需求的快速增长,光学零件的需求数量迅速提高,同时对产品的性能指标也有了更高更严格的要求,这就对干涉仪的自动化检测质量和速度提出了更高的要求。虽然目前很多国外进口的干涉仪的性能和技术可以满足这一需求,但由于国外干涉仪价格昂贵而促使许多光学冷加工企业迫切需要自主研发自动化程度相对较高的干涉仪,以实现既能降低生产成本又能提高生产效率的双赢经营理念。在干涉仪器中,干涉图像的采集和处理是其自动化检测的核心环节,直接决定着干涉仪性能的优劣。针对本实验室研制的干涉仪采集到的干涉图像用MATAB软件进行数字化的处理,最后用Zernike多项式拟合出被检球面的波面函数,通过MATLAB编程实现对该球面干涉仪检测信号的自动化处理。
1 干涉仪的原理与结构
非接触在线干涉仪是在泰曼-格林干涉(图1)的理论基础上研制而成,图2为实验室研制的干涉仪图片。图3为干涉仪的基本结构简图,右边虚线框内为光线传播系统,主要由激光器、空间滤波器、扩束镜、分光棱镜、样板透镜、待测镜片、接收屏等元件组成,其主要工作原理是把光学样板紧靠在待测镜片底座的上端面上,从激光器射出的细平行光经过滤波器打到扩束镜的前端镜片上,光束被扩束到适应于检测口径的光束直径,然后光束入射到分光棱镜的半透半反表面上被分成两束光,一束光沿着光轴x 方向射向光学样板的基准面上,经反射后返回,形成参考波前。另一束光沿光轴y 方向射向待测镜片底座上待测镜片的基准面,经反射后返回,形成测试波前。参考波前与测试波前经分光棱镜汇合后形成干涉,接收屏处可以观察到干涉条纹。左边虚线框内为数据处理部分,数据采集卡把CCD 接收到的干涉条纹数据存入计算机中[1]。
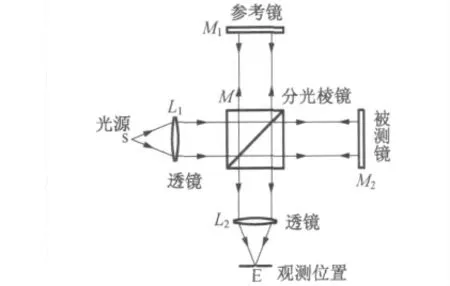
图1 泰曼-格林干涉原理Fig.1 Twyman-Green interferometry principle

图2 干涉仪样机图片Fig.2 Picture of interferometer prototype
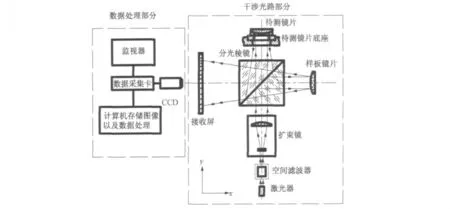
图3 干涉仪结构简图Fig.3 Interferometer structure diagram
2 干涉仪图像处理系统设计
实验室研发的干涉仪的数据处理系统如图4 所示,主要包括7大模块:干涉图像数据采集模块、干涉图像预处理模块、干涉图像骨架提取模块、干涉图像骨架修复模块、干涉条纹跟踪标记模块、Zernike波面拟合模块以及面形偏差计算模块[2]。这7大模块环环相扣,每一模块的处理都是为下一模块做准备打基础。后6个模块全是用MATLAB编写。
2.1 干涉图像数据采集模块
实验室使用的数据采集卡型号为DH-CG300,DHCG300是基于PCI总线的高性能视频采集卡,可进行高质量彩色/黑白图像的实时采集。DH-CG300可将输入的彩色或黑白视频信号,经数字解码器、模/数转换器进行比例缩放、裁剪、采集、色度空间变换等处理,通过PCI总线传送到VGA 卡上实时显示或传送到计算机内存中实时存储[3]。图5为本实验室研发的干涉仪采集到的三幅不同曲率半径R 镜片的干涉条纹图像。

图4 干涉仪图像处理系统的构成Fig.4 The components of interferometer image processing system

图5 干涉图像Fig.5 Interference image
2.2 干涉图像预处理模块
干涉图像预处理工作是为下一步中轮廓提取做准备的,所以图像的预处理至关重要。干涉图像预处理模块主要的处理流程如图6所示。采集到的干涉图像中存在着一定程度的噪声干扰,比如:振动和空气流动,所以滤波去噪是这一模块中非常重要的一步。在干涉仪的图像预处理中,灰度图像首先经过两次中值滤波(MATLAB中的medfilt2函数[4]);然后再经过一次自适应滤波(MATLAB 中的wiener2函数[4]);最后利用小波去噪(MATLAB中的wrcoef2函数),以获得含噪声较少的图像[5]。图7为经过预处理模块后得到的干涉图像。
2.3 干涉图像骨架提取模块
干涉图像骨架提取模块就是通过数字图像处理技术提取干涉条纹的主干,为后面的波面拟合打下基础。这一模块中图像依次经过了开运算、膨胀、腐蚀、开运算、细化几个处理过程。其中细化是最关键的一步,它直接关系到后面的波面拟合质量。通过综合比较Hilditch、Pavlidis、Rosenfeld细化算法以及Zhang和Suen提出的ZS算法之后,最终系统采用ZS算法细化条纹[6]。图8为细化模块处理的结果。
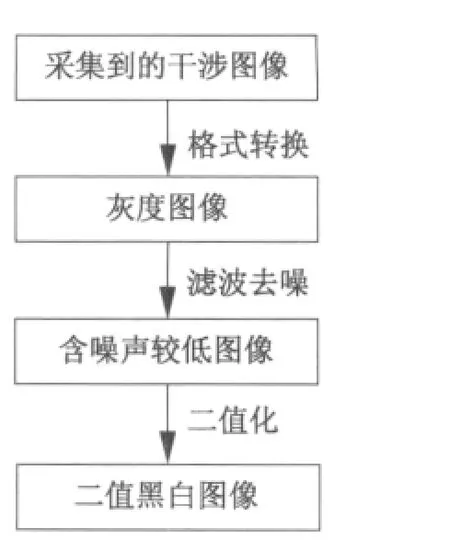
图6 预处理流程图Fig.6 Pretreatment flowchart

图7 去噪图像和二值图像Fig.7 Denoising image and two value image
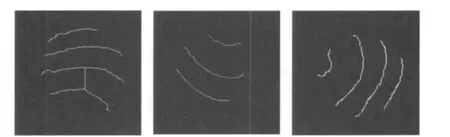
图8 骨架图Fig.8 Skeleton image
2.4 干涉图像骨架修复模块
经过细化模块处理后的骨架图有时会出现分叉,这些分叉大致可以分为以下三种:十字分叉,三叉分叉,丁字分叉。选用一个3×3模块从左到右从上到下依次扫描整个骨架图像,首先找出这些分叉点,然后判断分叉点的类型,根据分叉点类型的不同做出不同的处理。一般扫描一次之后还会出现有分叉点,所以这一步需要2~3次的连续扫描才能基本上删除这些分叉。骨架修复之后的图像如图9所示。

图9 骨架修复图像Fig.9 Skeleton restoration image
2.5 干涉条纹跟踪标记模块
条纹级次的确定是处理单幅静态干涉图像很重要的步骤。计算机对细化后的条纹采点时,不能确定所采的点属于哪个干涉级次,所以必须对干涉条纹进行追踪并标记级次。本系统的条纹标记适用于无闭合的干涉条纹。具体标记方法如下:从第一行开始逐行扫描骨架图像,直到找到第一个灰度值为255的点(条纹像素点的灰度值为255,背景的灰度值为0),改变它的灰度值为某一灰度值(比如1),然后继续往下扫描,如果遇到灰度值为255的点,判断其周围的3×3领域中是否存在灰度值不为0的点,如果存在则读取该灰度值并把该灰度值赋值给该点;若不存在,不改变灰度值,继续扫描完整幅图像,完成第一条条纹的标记。重复该方法,完成剩余的条纹的标记。这种标记方法一般需要多次重复扫描图像,才能保证每一灰度值为255的点都被标记到。
2.6 Zenike波面拟合模块
干涉波面的拟合,就是对离散的干涉条纹上的数值进行数学处理,把这些包含着被测表面信息的干涉波面上的离散点拟合成一个与实际的干涉波面尽可能一致的波面函数。
在众多类似的研究中,绝大多数研究者最终都选择了Zernike多项式作为对被测光学波面拟合的基底函数系。理由如下:(1)Zernike多项式在单位圆上正交;(2)Zernike多项式自身所特有的旋转对称性,使它在光学问题的求解过程中,一般均具有良好的收敛性;(3)Zernike多项式与初级像差有着一定的对应关系[7]。这一部分的处理过程如图10所示。Zernike多项式的拟合方法有最小二乘法、Gram-schimdt正交法以及Householder变换法等,现采用稳定性比较好的Gram-schimdt正交法[8]。图11(a)~图11(c)分别为图5(a)~图5(c)通过拟合模块得到的波面图。

图10 波面拟合流程图Fig.10 Wavefront fitting flowchart

图11 三维波面图Fig.11 The 3Dwavefront
2.7 面形偏差计算模块
这一模块依据上面波面拟合的结果对面形偏差的两个指标进行计算,即镜片面形PV 值以及RMS值两个指标。
PV 值表示待测波面相对于参考波面的峰谷值之差,用公式表示为:

RMS值表示待测波面相对于参考波面各点偏差Ei的均方根值,用公式表示为:

3 测量结果与分析
表1为实验室研制样机测试的三组数据,样机采用的激光器波长为632.8nm。
从表1的测量结果可以看出PV 值和RMS值达到了μm 级,根据光学测量方面的经验可知一个光圈大约相当于0.5个波长,那么根据上面测量的PV 值可以估算出三个干涉图的局部光圈ΔN 分别为:1.3、0.4、0.8,这个数值与直接用肉眼判定的局部光圈值基本上吻合,这就说明干涉图像的处理结果基本上达到了样机预期的目标。接下来要做的就是将本样机测量的数据与市场上的干涉仪测得的数据进行对比,经行全面的误差分析,做适当的改进,进一步提高精度。

表1 样机测试数据Tab.1 The test data of prototype
4 结 论
本系统应用数字图像处理技术,通过MATLAB图像处理软件编程,实现了对本实验室研制的球面干涉仪检测信号(干涉图)的自动化处理,可以绘出三维波面图以及计算出被检镜片的面型数据PV 值和RMS值。该算法相比空域相位测量法中的傅里叶变化(FFT)算法和空间载波相移法(SCPS)算法虽然在精度上略低一筹,但SCPS算法需要复杂的修正处理,而FFT 算法需要大量复杂的计算,所以文中干涉图像处理算法相对简单。对目前大多数光学企业来讲,市面上现有的干涉仪由于价格昂贵、操作繁琐、体积庞大等原因仅仅使用在镜片的终检环节上,且不适合大批量的在线检测。而文中算法需要的设备简单,操作方便,可以更好地满足镜片加工企业大批量生产时非接触在线面形的检测要求。
[1] 韩振华,林 健,卓金寨,等.一种球面在线检测系统及其结构设计[J].光学仪器,2012,32(1):76-80.
[2] 李全臣.干涉图数据处理的一种方法[J].计量技术,1999,3(6):3-6.
[3] 鄢静舟,雷 凡,周必方,等.用Zernike多项式进行波面拟合的几种算法[J].光学 精密工程,1999,7(5):119-128.
[4] 龚 纯,王正林.MATLAB语言常用算法程序集[M].北京:电子工业出版社,2008:115-141.
[5] WILLIAM K P.数字图像处理[M].邓鲁华,张延恒,译.北京:机械工业出版社,2005:158-433.
[6] 朱 昊,解 波,黄振宇,等.泰曼-格林干涉仪干涉条纹计算机图像处理试验系统[J].大学物理,2007,26(2):42-44.
[7] 鄢静舟,雷 凡,周必方,等.干涉图特征信息自动采集方法[J].光学技术,2000,26(1):70-75.
[8] 张 伟,刘剑峰,龙夫年,等.基于Zernike多项式进行波面拟合研究[J].光学技术,2005,3(5):674-677.
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
计测技术(2020年6期)2020-06-09
水道港口(2020年6期)2020-02-22
小福尔摩斯(2019年2期)2019-09-10
航天电子对抗(2019年4期)2019-06-02
小学生必读(低年级版)(2019年9期)2019-04-13
小学生必读(低年级版)(2019年10期)2019-04-13
中学教学参考·理科版(2018年7期)2018-10-20
中文信息(2018年2期)2018-05-30
制导与引信(2017年3期)2017-11-02
