基于三维激光扫描技术的建筑物模型重建
2013-03-03 11:44蚌埠市勘测设计研究院安徽蚌埠233000
城市勘测 2013年3期
(蚌埠市勘测设计研究院,安徽蚌埠 233000)
基于三维激光扫描技术的建筑物模型重建
姜如波∗
(蚌埠市勘测设计研究院,安徽蚌埠 233000)
三维激光扫描是近年发展起来的一项新兴的测绘技术,具有数据获取速度快、自动化程度高、全方位、非接触式测量、数据获取海量等诸多优点,为建筑物三维建模提供了一种全新的方法。本文在介绍三维激光扫描原理的基础上,通过某建筑物扫描的实例,详细说明了三维激光扫描获取数据的流程、数据预处理以及数据匹配的方法,最后采用两种不同的建模方法对点云数据进行三维重建,并分析其优缺点。
三维激光扫描;模型重建;点云数据
1 引 言
三维激光扫描技术是近年发展起来的一项新兴测绘技术,将传统的单点测量方式转变成面域点云数据测量,它可以对各种复杂、不规则物体的表面进行全方位、快速、非接触式扫描,同时获取海量的精确点云数据。三维激光扫描技术的一项重要意义在于将“实物精确的数字化”,它可以真实描述扫描对象的三维结构及形态特征。传统三维建模采用的方法是以物体近景照片为基础,通过相应的三维建模软件手工建模,在模型尺寸方面仅仅靠人为估算或者采用传统测量方法量取个别点的坐标,这种方法费时费力,精度不高,建立的三维模型不可量测。而三维激光扫描则克服传统建筑测量建立三维模型的局限性,使得人们从建筑物大量的长宽高的测量中解脱出来,实现快速、精确、高效率地建立建筑物三维模型,最终将数字三维模型存储到电脑中。正因为三维激光扫描技术如此众多的优点,不少研究学者正尝试将其应用到各个领域,如古建筑文物保护[1,2]、数字城市[3]、自然灾害调查[4]等领域。
本文在介绍三维激光扫描原理的基础上,通过对某建筑物进行扫描的实例,详细说明了三维激光扫描获取数据的流程、数据预处理以及数据匹配的方法,最后采用两种不同的建模方法对点云数据进行三维重建,并分析其优缺点。
2 三维激光扫描原理
三维激光扫描仪的主要构造是由一台精确的激光测距仪与一个以均匀角速度转动的伺服马达转动仪器组成。三维激光扫描仪发射器发出一个激光脉冲信号,经物体表面漫反射后,传回到仪器的接收器,从而获取到目标物的距离和角度,同时精密时钟控制编码器同步测量每个激光脉冲横向扫描角度观测值α和纵向扫描角度观测值θ,实现对目标物进行精确测量,获得目标物的线面等外表特征。三维激光扫描仪采用内部坐标系统(如图1),其中坐标系定义为:坐标原点位于激光发射处,扫描仪初始转动轴为X轴,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直,构成右手坐标系。由此可得到各个扫描点相对于仪器的坐标:
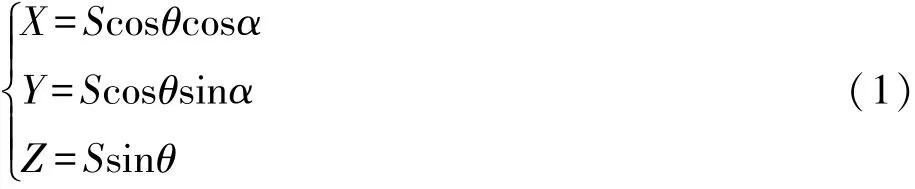
图1 三维激光扫描仪坐标系统
为了获取建筑物的三维激光扫描点云数据,本文采用Trimble GX 200全站式三维激光扫描仪对一个标志性建筑物进行扫描,该仪器测距范围2m~200m,最大能达到300m,在100m时单点精度和测距精度为12mm和7mm,扫描分辨率在100m处可达到3mm。
3 三维激光扫描数据模型重建
三维激光扫描技术通过激光扫描测量的方法对物体的整体或局部进行高精度的测量,以获得物体的线面特征、空间关系等三维数据,从中所采集的离散点几何称之为点云数据。
本文通过对一个标志性建筑物进行扫描获取其点云数据,再对点云数据加工处理,最后对建筑物进行三维重建。利用三维激光扫描数据进行三维模型重建的主要步骤是:数据获取、数据预处理、数据配准、数据重建和模型贴图。
3.1 三维点云数据获取
在三维激光扫描仪采集目标点云过程中,受到扫描仪视场角、场景的大小的限制,往往仪器不能一次获取完整的点云数据,需要从不同角度架站,进行多次的扫描获取多组重叠的点云数据。在扫描之前,应根据扫描物体的特征、扫描的精度,制定详细的扫描方案及确定扫描的点云间隔。同时,在扫描时应将仪器架在遮挡物少、视野开阔、能更多更好扫描目标特征的地方。
本文采用Trimble仪器配套的扫描软件PointScape进行扫描,由于本文只研究点云数据重建模型的过程,不需要测量扫描物体精确的大地坐标,所以实验没有对测站点及标靶所在的位置布设控制网测量其坐标,而是采用任意点设站。首先对3个标靶进行扫描识别,求取其精确的标靶中心三维坐标,为后面点云数据配准提供参考坐标系,再通过PointScape软件截取需要扫描的区域及扫描的点云密度,从而在保证扫描点云质量的前提下,提高扫描速度,缩短外业工作时间。如图2所示,为其中一站扫描的点云数据,图3为拼接后的点云数据。
图2 扫描的点云数据

图3 拼接后的点云数据
3.2 数据预处理
在数据采集时不免受到一些树木、车流及行人等因素的影响,从而造成获取的数据存在与扫描物体不相关的噪声,需要使用一些滤波算法过滤掉遮挡物体的点云数据以及一些离散点,保留目标物的点云数据以便下一步处理,这一过程叫做点云数据的预处理。数据的预处理是处理过程中尤为重要的一步,这一步直接影响到以后的三维模型三角网重建的效果及建模精度。正因为这一步的重要性,不少学者进行了对点云数据的预处理进行了研究,大致可以分为:基于数学形态学滤波方法[5]、基于先验信息的滤波方法[6]、基于坡度的滤波方法[7]、移动窗口最小二乘拟合的方法滤波[8]等几种方法。这些方法有的需要反复迭代,有的只适用于地面高程滤波,有的需要将离散点生成规则网格再进行内插影响点云的精度,有的则只针对特定的目标结构,总体说来每种方法都有其适用性和局限性,目前还没有一种滤波方法能适用于任何特征的点云数据,所以只有根据扫描目标特有的结构,选择特定的滤波方法。本文采用半自动滤波的方法,首先对点云数据进行统计,分析出目标物的点云范围,设定一个阈值,剔除扫描物体范围外的噪声。最后,通过人工操作的方式剔除一些无法自动滤除的噪声。
3.3 点云数据配准
为了得到被扫描物体的全方位立体点云,仍需将各测站扫描的点云数据进行配准,建立统一的独立坐标系,形成一组完整的点云数据。目前,三维激光扫描配准大体可分为两种方式:①基于控制点或标靶的配准方法[9];②最近点迭代配准方法[10,11]。最近点迭代配准方法又叫ICP算法,该算法首先需要搜索给定一组点云内的点在另一组点云中最近点,然后计算与最近点的距离,转换到统一坐标系下,经过反复迭代直到需找到一组能使两组点云匹配最佳的转换参数。该方法由于迭代计算量大,当遇到大场景或点云数量庞大时,配准的精度和速度大大降低。本文采用基于标靶匹配的方法,通过3个同名标靶在3组点云中不同的坐标求取一组转换参数,再将3组点云数据按式(2)转换到统一坐标系下。由于本文采用任意点设站方式进行扫描的,各组点云中标靶没有统一的大地坐标,采用以第一站标靶的独立坐标作为基准坐标,后两站依照第一站的坐标系进行配准。配准结果如表1所示。从表1中看出,3站标靶的配准误差为±2 mm,该精度完全满足建立三维模型的要求。
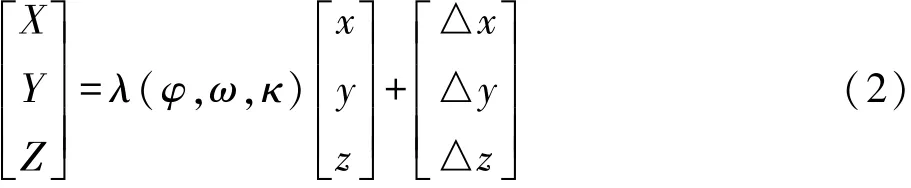
式中,(λ,φ,ω,κ,△x,△y,△z)为通过同名标靶坐标求取的一组转换参数,其中λ为两坐标系之间尺度缩放系数;(φ,ω,κ)为旋转参数;(△x,△y,△z)为平移参数。
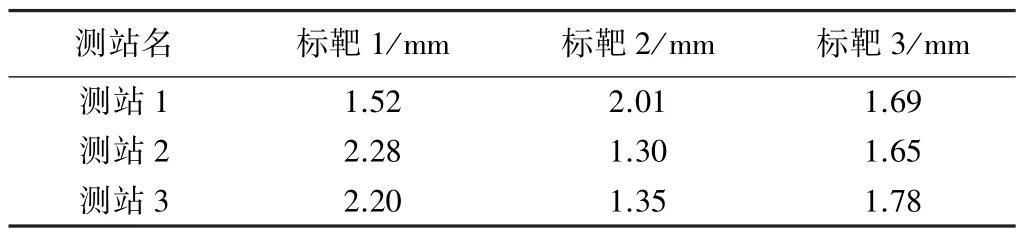
点云数据配准精度 表1
由于生成的点云是由多组数据拼接而成,不可避免地存在点云数据重叠、疏密不一、数据冗余的情况,给后续三角格网的建立带来困难,所以需要对点云整体进行重采样,对点云的密度进行限定。如果重采样后的点云过密,则生成三角格网过多,造成数据量庞大,不利于三维建模的进行,如果重采样后的点云过于稀疏,则生成三维模型表面会丢失一部分细节,因此在点云数据重采样时,根据建模精度的要求选定一个合适的距离阈值,在保障建立模型的精细程度的基础上,尽量缩减点云的数量。
3.4 三维模型重建
激光测距扫描仪获取的只是点云数据,而在实际应用中需要具有应用价值的是含有物体拓扑关系及几何信息的三维模型。模型重建的方式大致范围两种:一种是三角网格模型[12,13],另一种是基于物体特征的实体模型[14~16]。三角格网模型是将空间中离散点云用三角面片构建成物体的表面,这种方法可以通过相应的算法自动恢复物体表面。实体模型是根据物体的几何特征构建物体表面的面线。
本文分别利用这两种方法对匹配后的点云数据进行三维建模,对比分析两种方法优缺点。
(1)三角网格建模
笔者对点云数据进行三维格网建模时借助一款专业逆向工程软件Geomagic Studio,首先将点云数据转成∗.asc坐标格式的数据,再利用Geomagic对点云数据进行重采样(如图4所示),获取合适的点间距,为自动建立三角网格做准备,最后通过软件中自动生成Delaunay三角格网(如图5所示)。由于在数据采集时不免受到树木遮挡、模型本身形状的限制,致使获取的数据并不完整,造成在模型表面存在空洞,这些地方无法构建三角网,所以在生成三角网格模型后,需要根据物体本身特征对模型进行修补。
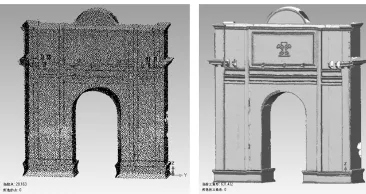
图4 重采样后的点云 图5 三角格网模型
(2)基于特征提取建模
基于特征提取建模方法首先寻找物体表面的特征线(如转折处、尖锐边),再采用简单的线面构建物体的外轮廓。本文在参考物体的外表的基础上,采用AutoCAD和3ds Max等软件对点云数据进行处理,生成模型的外部轮廓。图6为基于特征提取的模型。

图6 基于特征提取建立的模型 图7 赋予材质的三维模型
本文通过两种建模方法对比分析得出:三角网模型能根据算法自动构建三角格网,节省大量建模时间,同时表现建筑物更精细、准确,如图所示的细节都能很好地表现出来,但是这种方法数据量较大,无法直接地表示物体的几何特征;而基于特征提取建模工作量太大,而且没有三角网模型精细,一些细节部分或不规则物体难以表达,但是数据量很小,物体表面特征表现较为明显。两种建模方法对比表如表2所示。
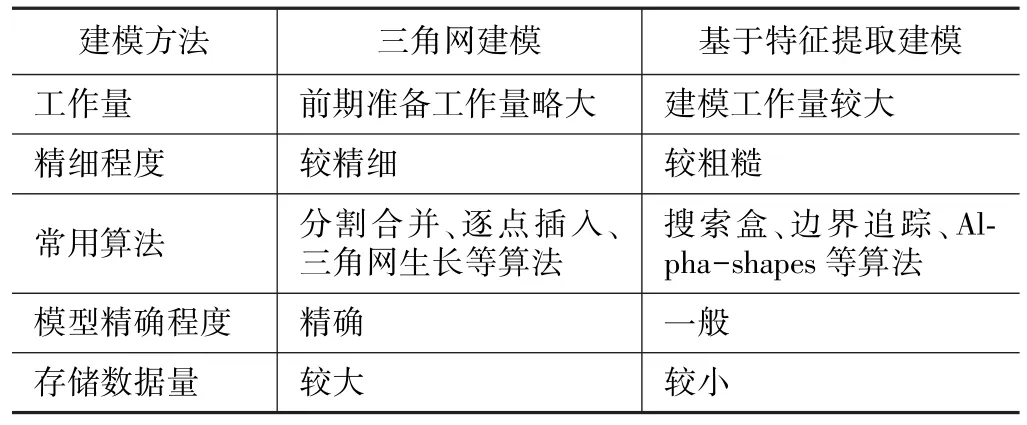
三角网建模与特征线建模对比表 表2
4 结 语
三维激光扫描仪采用独特的点云建模方式,为建筑物建模提供了一种全新的思路。本文通过三维激光扫描仪对一建筑物扫描,并建立该建筑物的三维模型,同时介绍了三维激光扫描的原理、获取数据流程、数据预处理以及数据匹配的方法,最后采用两种不同的方法对点云数据进行建模,并分析其优缺点。在利用三维激光扫描数据进行建模的过程中得出以下结论:
(1)相比传统的单点测量方法,三维激光扫描仪具有数据获取速度快、自动化程度高、全方位、非接触式测量、数据获取海量等诸多优点,大大减少了外业测量的工作量,以其获取的三维空间数据,可快捷地建立精确的三维模型。
(2)通过对三角网格建模方法和基于特征提取建模方法进行对比分析,两种方法各有优缺点,因此在重建一个建筑物模型时,应首先分析建筑物的复杂程度,结合两种方法的优缺点,选择合适的建模方法,这样才能在保证建模精度的同时,提高建模效率。当遇到较为复杂的物体表面时,应采用三角格网建模;当遇到较为规则、特征明显的表面时,应采用基于特征提取的建模方法。
虽然三维激光扫描在建筑物建模方面存在很大的优势,但仍有一定局限或问题需进一步研究。如受到三维激光扫描视角的局限性,扫描时很多地方无法扫到,尤其是物体的顶部,因此与航空摄影测量等其他测量手段相结合是以后的发展趋势;快速、准确将点云数据提取物体的特征,建立完整、逼真的三维模型也是进一步需要研究的内容。相信随着三维激光扫描技术的迅猛发展,三维激光扫描处理技术也会越来越成熟,其理论和应用都将促进空间测量、数字城市等领域的进一步发展。
[1] 周俊召,郑书民,胡松等.地面三维激光扫描在石窟石刻文物保护测绘中的应用[J].测绘通报,2008(12).
[2] 李滨.徕卡三维激光扫描系统在文物保护领域的应用[J].测绘通报,2008(6).
[3] 李杰,周兴华,唐秋华等.三维激光扫描技术在数字城市中的应用[J].海岸工程,2011(3).
[4] 张庆圆,孙德鸿,朱本璋等.三维激光扫描技术应用于沙丘监测的研究[J].测绘通报,2011(4).
[5] 李勇,吴华意.基于形态学梯度的机载激光扫描数据滤波方法[J].遥感学报,2008(4).
[6] 赵鑫,吴侃,蔡来良.具有先验信息的地面三维激光扫描地形测量数据去噪算法[J].大地测量与地球动力学,2011(4).
[7] 李亮,吴侃,刘虎等.地面三维激光扫描地形测量数据粗差剔除算法及实现[J].测绘科学,2010(3).
[8] 何正斌,田永瑞.机载三维激光扫描点云非地面点剔除算法[J].大地测量与地球动力学,2009(4).
[9] 程效军,施贵刚,王峰等.点云配准误差传播规律的研究[J].同济大学学报·自然科学版,2009(12).
[10]戴静兰,陈志杨,叶修梓.ICP算法在点云配准中的应用[J].中国图象图形学报,2007(3).
[11]朱延娟,周来水,张丽艳.散乱点云数据配准算法[J].计算机辅助设计与图形学学报,2006(4).
[12]戴彬.基于车载激光扫描数据的三维重建研究[D].北京:首都师范大学,2011.
[13]张涛.基于离散点云的三维重建研究与实现[D].哈尔滨:哈尔滨工程大学,2010.
[14]殷国伟,张汉德,范学玮等.机载三维激光成像系统点云数据滤波与地面点提取算法研究[J].遥感信息,2010(2).
[15]王宗跃,马洪超,徐宏根等.海量点云的边缘快速提取算法研究[J].计算机工程与应用,2010(36).
[16]肖华.网格重构及特征提取技术研究[D].杭州:浙江大学,2010.
Building Model Reconstruction Based on the Technology of 3D Laser Scanning
Jiang Rubo
(Bengbu Geotechnical Engineering and Surveying Institute,Bengbu 233000,China)
3D laser scanning is a new surveying and mapping technology which is developed in recent years.It provides a new method to reconstruct3Dmodel of buildings,with high data acquisition speed,high degree of automation,omni-directional,non-contact-typemeasurement,huge data acquisition,andmany other advantages.Based on the introduction of the 3D laser scanning principle,through a case of a building scans,this article describes the process of getting the 3D laser scanning data,the data pretreatment and the datamatchingmethod in detail.At last,this article adopts two differentmodelingmethods to reconstruct 3D model by point cloud data,and analyze their advantages and disadvantages.
3D laser scanning;model reconstruction;point cloud data
1672-8262(2013)03-113-04
P234.4
B
2012—12—27
姜如波(1984—),男,助理工程师,主要从事城市测量工作。
猜你喜欢
铁道建筑技术(2021年4期)2021-07-21
黑龙江水利科技(2020年8期)2021-01-21
小学生学习指导(低年级)(2019年9期)2019-09-25
模具制造(2019年3期)2019-06-06
测绘工程(2018年3期)2018-03-20
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
小天使·二年级语数英综合(2015年12期)2015-12-04
现代营销·经营版(2015年3期)2015-04-20
测绘学报(2015年4期)2015-01-14
大地测量与地球动力学(2014年3期)2014-02-13