
甜菜块根收获机械化技术
2013-03-03 09:25卢秉福耿贵周艳丽
中国糖料 2013年2期
卢秉福,耿贵,周艳丽
(1.黑龙江大学农作物研究院,哈尔滨150080;2.中国农业科学院甜菜研究所,哈尔滨150080;3.黑龙江大学农业资源与环境学院,哈尔滨150080)
甜菜块根收获机械化技术
卢秉福1,2,耿贵1,2,周艳丽2,3
(1.黑龙江大学农作物研究院,哈尔滨150080;2.中国农业科学院甜菜研究所,哈尔滨150080;3.黑龙江大学农业资源与环境学院,哈尔滨150080)
介绍了甜菜块根收获机械的结构和工作原理,对主要工作部件的选择进行了分析,并阐述了甜菜块根收获机的发展过程及发展趋势。实现甜菜收获机械化,不仅能提高生产效率,降低劳动强度,而且对提高甜菜产业竞争力具有重要的意义。
甜菜;收获;机械化
近年来,随着农村劳动力转移步伐加快,农业劳动力价格越来越高,甜菜种植人工成本也随之增加,因此,甜菜生产对机械化的需求越来越迫切,尤其是甜菜收获机械化。甜菜机械化收获分为联合收获和分段收获,联合收获是指甜菜收获机一次作业即可完成切缨、挖掘、清理、输送、装运等所有工序;分段收获又分为二段收获和三段收获,二段收获是指先使用甜菜茎叶收获机进行甜菜茎叶切削,然后用块根挖掘机完成挖掘、清理、输送、装运等工序;三段收获是指先完成甜菜茎叶切削,再进行甜菜块根挖掘,挖出的块根集条或集堆,最后用捡拾机捡拾甜菜块根、清理、装运。甜菜块根挖掘是甜菜收获作业的主要环节,是联合收获作业或分段收获作业的关键步骤。实现甜菜收获机械化,对减少人工费用,降低生产成本,提高甜菜产业竞争力具有重要的意义。
1 甜菜挖掘机的结构与工作原理
1.1甜菜挖掘机的结构
甜菜挖掘收获机,无论是联合收获机还是分段收获机,其结构均比较复杂,但机型不同、自动化程度不同,其复杂程度也不同。但概括起来说,甜菜收获机结构主要包括,挖掘部件系统、拣拾(清理)系统、清理输送系统、集箱装载系统和控制系统。随着科技水平的提高,甜菜机械研制部门和生产商都在力求创新,以改善甜菜收获机的性能,减少收获损失,提高收获质量和生产效率。
1.2甜菜挖掘机的工作原理
甜菜联合收获机的工作部件由升运器等部件组成。甜菜块根在挖掘部件作业下脱离土壤后,由倾斜栅状圆盘清理器拣拾清理,再由清理输送装置进行清理、输送,然后被传送到升运器,在进一步分离的同时被升运到块根贮藏箱顶部,在自重的作用之下,甜菜块根落入块根贮藏箱。
甜菜块根挖掘集条机主要由挖掘部件、栅状回转盘、集条挡壁组成,甜菜块根被挖出后,经过两个相反方向旋转的栅状回转盘拣拾清理,从集条挡壁后端出口处被抛到地面而归拢成条,以便拣拾装载机作业。集成一条的甜菜经过甜菜拣拾清理装载机装运到运输车内,在捡拾装载过程中,甜菜块根得到进一步的清理。
2 工作部件的功能与特性
2.1挖掘工作部件
挖掘部件是甜菜块根挖掘机的核心工作部件,有叉式、铧铲式、回转式、组合式四种主要类型,每种挖掘部件都有自己的特点,适合不同的工作条件。叉式挖掘器出现最早,包括挖掘叉和挖掘铲,其结构简单,不易变形,入土性好,但杂草多时易堵塞,块根提升效果不够理想,而具有振动功能的叉式、铲式挖掘部件挖掘甜菜块根时可以减轻阻力,改善挖掘效果;圆盘挖掘器是将两个挖掘圆盘按一定角度安装在两根轴上,一个主动,一个随动,或者两个圆盘均接地随动,工作时两个圆盘在回转过程中将块根挖出并送往输送器,挖掘质量较好,并有较好的块根提升效果,适应较硬的土壤,但导向性差,遇潮湿粘重的土壤易堵塞;组合式挖掘器集合了其他挖掘器的优点,变种很多,各国非常重视对甜菜挖掘机组合式挖掘部件的研究,对组合式挖掘器进行大量的试验,出现多种新型组合挖掘部件,其中球面圆盘和滑掌组合的挖掘器应用广泛,适于几乎所有的土质。
挖掘部件的选择应根据甜菜收获时的土壤条件、土壤类型、土壤含水率等情况来定,尤其是土壤含水率,对挖掘部件的挖掘质量影响较大,不同的土壤类型,适于收获的土壤水分含量也不同,一般情况下,土壤的绝对含水率在13%~18%较为适宜收获。
2.2拣拾(清理)部件
甜菜挖掘收获机上的拣拾部件都具有清理功能,既能拣拾、又能清理甜菜块根,常见的有栅状回转盘、夹持链型、拨块轮式三种。栅状回转圆盘是最典型、常用的拣拾部件,具有结构紧凑的特点,捡拾效果好,清理分离作用明显;夹持链型拣拾部件的特点是结构和传动都较为简单,拣拾链与夹持链之间的速度差能够对甜菜块根起到很好的揉搓作用,把土块、杂物和粘附在块根上的泥土清理干净,通过调整夹持链与拣拾链之间的空隙可以适应甜菜块根条铺的厚度;拨块轮式拣拾部件出现较早,可满足甜菜块根的拣拾要求,但工作阻力较大,有裹土现象,清理效果一般。
2.3甜菜收获机的清理、输送机构
清理输送机构种类繁多,主要有栅状回转圆盘、杆条链、转笼、螺旋滚筒、传送带和复式清理输送机构。栅状回转圆盘拣拾清理装置,利用离心力将块根甩到回转盘边缘,甜菜块根在圆盘栅条和弹性挡壁的擦搓作用下,把粘附在块根表面的泥土清理干净。栅状回转圆盘既可以单独使用,也可以组合使用,甜菜块根通过栅状回转圆盘后可以集条或进入输送清理机构。
杆条链式清理输送机构分为单排杆条链和双排杆条链。单排杆条链有两种结构形式,勾形杆条链和长节距杆条链,主要用于各种倾斜和水平输送。双排杆条链用于块根拣拾、清理、输送,效果较单排好。杆条链式清理输送机构结构简单,工作可靠,分离效果好,特别是带齿的杆条链式清理机构,由于增加搓擦作用,效果更好。
转笼式清理输送机构一般采用垂直配置,可配置在机器的后面或侧面,使甜菜收获机结构更紧凑。转笼式清理输送机构输送高度大,分离、清理效果好。
螺旋滚筒输送器主要用于横向过渡输送,也可以用于垂直输送,输送器滚筒可完成甜菜块根最初的清理工作,可将泥土、石块、杂草和残留的甜菜顶分离出去。
传送带既可以用于水平输送,也可以用于垂直输送,能将甜菜块根输送到贮藏箱中,同时完成对甜菜的最后清理工作。
甜菜块根收获机的清理输送机构基本上均采用复式清理输送机构,二种或三种清理输送部件组合的较多,其特点是集合了各清理输送部件的优点,使甜菜块根得到了较好的清理、分离,并完成输送、装箱任务。
2.4集箱装载系统
甜菜箱的主要功能是在田间收获时存储甜菜,待存储箱甜菜装满时装入卡车或倾卸集堆。其卸载方式大致可分液压式卸载、机械式卸载、无动力卸载和复合式卸载四种。液压式卸载,特点是结构简单,操纵和卸载都方便而迅速,卸载力大,可允许采用较大的容积,应用较为普遍;机械式卸载,特点是机构较为复杂,需要有操作机构、动力离合器及传动等机构,需采用链耙输送,应用较为普遍,工作可靠;无动力卸载采用倾斜滑板,底门开口等形式,特点是结构简单,块根集箱容积较小时亦可采用;复合式卸载一般采用机械和液压形式的复合,具有很多优势,即能放堆又能装载,运输方便。
3 甜菜收获机械的研究与应用
3.1甜菜收获机械的研究概况
甜菜收获费工时、强度大,甜菜收获机械专用性强,几乎不能与其他作物通用,因此国外实现甜菜生产机械化的时间比大田作物一般要晚10~15年。从20世纪40年代国外就开始有甜菜块根挖掘机在甜菜收获上应用,早期的甜菜块根挖掘机与铧式犁差得多,甜菜块根挖出后,人工切缨、装运。随后甜菜挖掘机开始应用叉式、铲式挖掘部件和栅状回转圆盘,甜菜块根挖出后经过栅状回转圆盘初步清理集条,人工拣拾装运,这种甜菜收获机至今在很多国家仍在使用。20世纪60年代以后,甜菜挖掘机开始应用圆盘式、组合式、振动式挖掘部件,其中以组合式发展最快,甜菜收获基本上还是以分段作业为主。20世纪80年代以后,随着技术进步,甜菜收获机向大型化、联合收获作业方向发展,各种大型、高效甜菜联合收获机相继出现,技术水平也已达到相当高的程度。
我国甜菜收获机械的研制始于20世纪50年代,主要是以引进前苏联甜菜生产机械为主,同时相关科研单位也进行研究,至60年代,已有“黑龙江-2甜菜联合收获机、蓄力甜菜收获机、综合甜菜切缨机”问世,但技术水平不高,研究进展一直不大。20世纪70年代末80年代初我国曾经对甜菜生产机械化进行了大规模的投资,引进了一批国外甜菜生产机械样机,国内很多大学、科研单位开展甜菜生产机械的研究工作,先后研制成功“农甜4TQ-2甜菜切缨机、农甜4TW-2甜菜挖掘机、龙糖4TQ-2甜菜切缨机、龙糖4TW-2甜菜挖掘机”等20多种甜菜收获机械,奠定了我国甜菜生产机械化的基础。
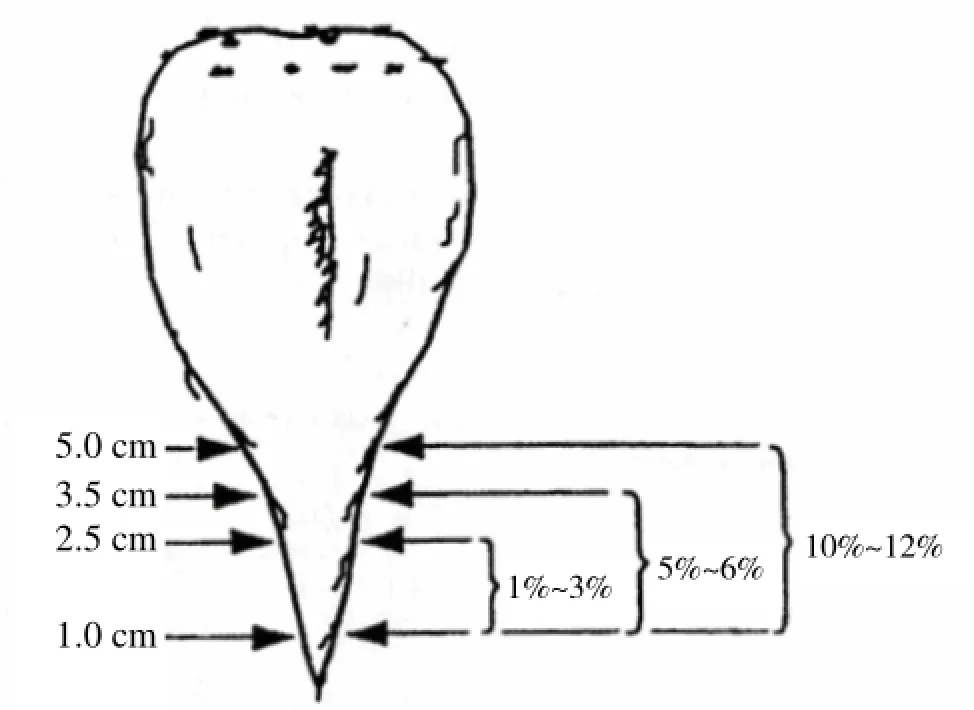
图1 甜菜尾根切削量与产量损失的关系
进入21世纪以来,各种农作物生产机械化水平快速提高,但甜菜生产机械化较为落后,已严重制约了甜菜生产。近年来许多糖厂、农场从国外引进了一批先进的甜菜生产机械,国内一些科研、生产部门也在积极研制,但由于甜菜生产机械、尤其是甜菜收获机械专用性强,使用时间短,市场容量小,研究水平较低。
3.2甜菜收获机械的发展趋势
(1)高新技术普及化。随着科学技术的快速发展,电子、计算机、液压、自动控制等技术已应用于甜菜联合收获机,如电子对行装置、电磁液压控制挖掘深度、自动控制导向等提高甜菜联合收获机作业精度和生产效率。(2)驱动动力大功率化。国外自走式大型甜菜联合收获机多为四轮驱动,发动机功率越来越大、功率贮备多,田间通过性能好,这使得甜菜联合收获机工作效率得到了极大的提高,甚至能在雨天或粘重的土壤中工作。(3)作业速度高速化。由于甜菜收获机的功率趋于大型化,工作速度也有很大提高,多为4~6km/h,有的可达7~8km/h,最快的可达10km/h,甜菜机械化收获的生产效率得到了极大的提高。
3.3甜菜收获机械的应用
我国甜菜收购标准规定,每个块根重量应大于100g,尾根直径应大于1cm。甜菜单产为45t/hm2时,在挖掘过程中,尾根直径为1cm时,符合收购质量标准,对甜菜产量无影响;尾根直径为2.5cm时,块根损失450~1350kg/hm2,产量损失达1%~3%;尾根直径为3.5cm时,块根损失2250~2700kg/hm2,产量损失达5%~6%;尾根直径为5cm时,块根损失4500~5400kg/hm2,产量损失达10%~12%,见图1。因此在采用机械化收获甜菜时,要尽可能根据气候、土壤条件选择配置合适的挖掘、清理部件的收获机,以减少甜菜损失。
除甜菜采用机械收获时因尾根折断造成损失外,甜菜收获机输送、清理部件对甜菜的击打、挤压会造成甜菜产量损失1%~3.2%,如果考虑其他诸如漏挖、漏检、破碎以及装卸、捣运、堆垛等损失,则甜菜块根损失更多。
4 小结
甜菜收获作业是甜菜生产机械化的一个难点,有针对性地开展甜菜收获机械的研制、推广与应用,不断加大对甜菜收获机械的投入力度,借鉴国外成功经验,进行技术创新,改善甜菜收获机的性能,提高甜菜收获效率,降低甜菜收获产量损失。甜菜糖厂与农业合作社进行合作,建立利益共同体,实现甜菜收获机械化,提高甜菜糖业的行业竞争力。
[1]卢秉福,张祖立.甜菜生产机械化的研究进展及发展趋势[J].农机化研究,2007(1):59-62.
[2]陈忠彦,亢诚,白丽丽.4TW-2型甜菜块根收获机简介[J].现代化农业,1997(7):28.
[3]陈进明.国外甜菜生产机械化简介[J].甜菜糖业-甜菜分册,1976(Z1):35-67.
[4]贾首星,汤智辉,谢建华,等.4TWZ-4型甜菜收获机的研制[J].新疆农机化,2002(4):48-50.
[5]张富国.甜菜机械化收获现状、问题及发展意见[J].新疆农机化,1998(1):18-19.
[6]姚宏学,张宏伟,闫向辉.甜菜机械化收获技术在焉耆垦区的应用[J].新疆农机化,2008(1):45-46.
[7]高君.甜菜收获机及其应用[J].农业机械,2003(11):46.
[8]何其芳,葛福来,沈玉晶,等.几种引进甜菜收获机械的技术性能试验[J].甜菜糖业-甜菜分册,1982(2):48-62.
[9]易东山,芦珍林.德荷马甜菜收获机的机械性能及应用[J].新疆农垦科技,2007(4):46-47.
[10]乌盟农牧机械研究所.国内外甜菜生产机械化概况[J].农机情报资料,1978(12):7-16.
[11]阿明.具有先进技术的芬兰甜菜收获机[J].农业机械,1999(7):25.
[12]付胜利.4TSL-2型甜菜收获机的研究与设计[J].农村牧区机械化,2007,71(2):32-33.
[13]杜士贵,刘丽华.4TWS-4型甜菜挖松机的研究[J].粮油加工与食品机械,1984(7):12-16.
[14]李福海,冯林,王国俊.甜菜收获机的研制[J].中国甜菜,1980(3):41-47.
[15]胡由芳,杜景生,吴跃清.甜菜挖掘收获机的部件选择及整机设计[J].甜菜糖业-甜菜分册,1983(2):58-70.
[16]Stephen Brown.Quality Harvesting[J].British Sugar Beet Review,1995,63(3):3-6.
[17]Mike Armstrong.French Target Harvest Quality[J].British Sugar Beet Review,1997,65(4):42-44.
[18]Michael Atkinson&Denis Kimber.Mechanization of the Sugar Beet Crop[J].British Sugar Beet Review,1998,66(3):31-34.
Mechanization Technology for Sugarbeet Root Harvest
LU Bing-fu1,2,GENG Gui1,2,ZHOU Yan-li2,3
(1.Crop Research Institute,Heilongjiang University,Harbin 150080,China;
2.College of Agricultural Resources and Environment,Heilongjiang University,Harbin 150080,China;
3.Sugarbeet Research Institute of Chinese Academy of Agricultural Sciences,Harbin 150080,China)
The mechanicalstructure and working principle ofthe sugarbeetrootharvester were introduced.The selection ofmain working parts,developmentprocess and its developmenttrend ofsugarbeet root harvest machines were analyzed.
sugarbeet;harvest;mechanization
S566.3
:B
1007-2624(2013)02-0065-03
2012-03-05
黑龙江省自然科学基金项目(C201239);农业部公益性行业(农业)科研专项经费专题(200903001-05-03)资助。
卢秉福(1963-),男,吉林省梅河口市人,博士、研究员,主要研究方向为甜菜生产机械化。
猜你喜欢
作物学报(2022年8期)2022-05-29
花卉(2022年9期)2022-05-10
农机使用与维修(2022年2期)2022-02-21
中国农村科技(2021年12期)2021-12-28
现代农村科技(2021年6期)2021-12-06
小哥白尼(趣味科学)(2021年12期)2021-03-16
悦游 Condé Nast Traveler(2021年4期)2021-01-13
种子(2020年10期)2020-11-19
———2020 款中农博远玉米收获机值得期待
河北农机(2020年1期)2020-01-11
河南畜牧兽医(2020年23期)2020-01-10
