基于深度图像的点云边界点提取
2013-02-27 01:34:02于振国
水利与建筑工程学报 2013年3期
刘 浩,李 冬,于振国,姜 旭
(河海大学 地球科学与工程学院,江苏南京210098)
0 引 言
三维激光扫描作为一种先进的全自动高精度立体扫描技术,又被称为“实景复制”技术,在逆向工程、测绘、虚拟仿真等领域正逐渐深入的应用。利用三维激光扫描仪采集的点云数据可以快速重建出原实体的三维模型,其中点云边界点的提取是数据压缩、目标识别、曲面重建的关键步骤之一。边界点可构成模型最基本的几何框架,因此边界点的正确提取对于准确表达模型外观具有关键作用。通常在边界点提取的过程中会首先进行模型特征点的提取,然后再依据一定的规则从候选特征点中筛选出边界点。Milroy M J[1]和Yang[2]在局部坐标系内进行二次参数曲面计算,通过判断曲率极值来提取边界点。贺美芳等[3-4]利用Yang的方法处理点云得到二次参数曲面方程,并利用朱心雄[5]提到的方法求高斯曲率、平均曲率来进行边界点提取。胡鑫等[6]利用梯度求解法,计算各采样点的法矢和曲率并进行阈值判断得到候选边界点。孙殿柱等[7]先建立散乱点云数据的拓扑关系,利用采样点及其k邻域点拟合微切平面,并将采样点和其k邻域点投影到微切平面,根据采样点及其k邻域点所对应投影点连线的最大夹角进行点云边界点的提取。法矢夹角法需要建立散乱点云数据之间的拓扑关系,计算采样点和其k邻域点法矢的夹角,运算量较大,增加了算法的时间复杂度。近些年国内外对深度图像的研究形成了热潮,除了直接利用点云坐标数据进行边界点提取外,还可以先将点云数据转化成深度图像,利用深度图像进行点云边界点提取。
1 利用深度图像提取点云边界点
1.1 深度图像
近几年国内外对深度图像的研究形成了热潮,深度图像不同于常见的灰度图像,灰度图像中的像素点代表了该点所接收光的强度或灰度,而深度图像中的像素点包含的是对应扫描点的深度信息。由于图像中的深度数据独立于光照及物体表面的光反射特性,与灰度图像相比深度图像分析中没有光照的阴影及物体光滑表面上纹理(图案)所产生的困扰,因而深度图像数据可以比较容易求得有关物体的更可靠的几何信息[8]。
1.2 深度图像的获取
目前产生深度图像主要有两种方式,一种是利用设备直接采集待扫描场景的深度数据并以图像的形式进行保存;另一种是先获取场景中每个采样点的三维坐标,再利用测站点或视点坐标转换成深度图像。
1.3 深度图像的边界提取
孙晓兰等[9]将三维点云坐标数据转化成2.5维深度图像,分析并评估了扫描线迭代法、双方向曲率法、二阶微分算子法等三种算法在深度图像边缘检测中的性能,实验表明:双方向曲率法对噪声较为敏感,有些主要边缘未能提取出来,在非边缘处还出现了很多孤立的边缘点;微分算子法能将一些主要区域分割出来,并且在三种方法中运算速度最快,但欠分割较严重,漏掉了很多小块区域,可以应用于分割大块区域的场合中;扫描线迭代法能检测出所有的边缘,可以较好地平衡边缘定位精度和抗噪声性能的矛盾。
2 边界点分类提取算法
2.1 算法介绍
在深度图像中,特征点通常呈现出距离数据从物体到背景的非连续变化。在论文中我们主要关注三种类型的特征点:物体边界点,阴影边界点和遮掩点。物体边界点是物体外围仍属于该物体的点,阴影边界点是背景中连接遮掩物的点,遮掩点是物体边缘和阴影边缘之间的内插点。遮掩点是三维激光测量中的典型现象,较好地处理遮掩点可以提高匹配和分类的结果。该算法由Steder等[10]提出,论文将对该算法的原理作详细解释并利用三维激光扫描仪获取的实际工程数据对该算法实用性进行检验并作分析评价。
2.2 算法步骤
论文中以下提到的2D位置指的是像素点在深度图像中位置,3D位置指的是采样点在测量坐标系中的坐标,同样,2D距离指的是图像中像素之间的距离,3D距离指的是点与点之间的欧式距离。
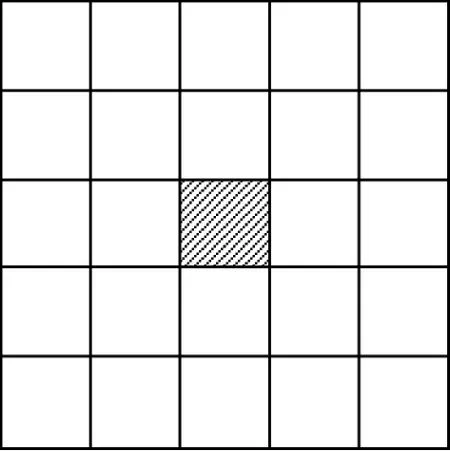
图1 采样点及其邻域点图
(2)搜索并计算深度图像中采样点与邻域点之间的3D距离{d0,d1,…,ds2-1}。
(3)对(2)中计算出的距离值进行升序排列{d′0,d′1,…,d′s2-1}。
(4)计算采样点与顶部邻域点间的平均距离dtop=‖px,y-ptop‖,其中px,y是深度图像中位置为(x,y)处的点,平均距离,mp参数可以在实验中进行调节,论文中设定mp=3。
(6)在所有候选物体边界点中选择2D距离最大(本文中选择3个像素)分值最高的点作为阴影点。
(7)比较 s′top=max(0.9,1-(1-sshadow)3)·stop和0.8的大小,如果 s′top大于0.8并且比 px,y-1和px,y+1处的分值高,则px,y处的点作为物体边界点,px,y-1和px,y+1作为阴影点,之间的点作为遮掩点。
(8)同理计算另外三个分值 sbottom、sleft、sright,其分别描述了在采样点底部、左侧和右侧存在边界的可能性。
2.3 实验
为了检验该算法的效果,作者选取了三维激光扫描仪获取的两处场景数据进行实验。场景1是一个桥梁,点云文件中共有692 812个点,场景2是一个放有实验仪器的房间,点云文件中共有359 363个点。
图2是利用转换后的点云坐标数据产生的场景1和场景2的深度图像。

图2 场景深度图像
图3是利用论文的算法对图2的深度图像进行处理,提取各对应场景的边界点。
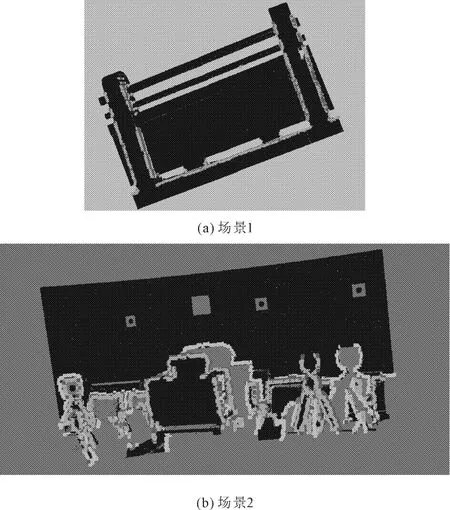
图3 场景边界点提取图
从实验效果来看,该算法基本能正确区分物体边界点、阴影边界点和遮掩点,对于噪声也有一定的抗干扰能力。因为算法主要依据深度图像的距离变化进行边界点的检测,因此要求边界点数据有一定梯度变化。
3 总 结
点云边界点提取是点云数据处理的一项关键技术,传统的边界点提取算法都是在直接利用点云坐标数据进行边界点的提取,存在运算量过大等弊端。论文利用边界点分类提取算法进行点云边界点的提取,并利用实际三维激光扫描仪获取的两处场景数据对算法进行验证,实验表明该算法基本能正确提取点云边界点,同时具有抗噪声干扰能力,具有一定的实用性。
[1] Milroy M J,Bradley C,Vickers G W.Segmentation of a wrap-around model using an active contour[J].Computer-Aided Design,1997,29(4):299-320.
[2] Yang M,Lee E.Segmentationof measured point data using a parametric quadric surface approximation[J].Computer-Aided Design,1999,31(7):449-457.
[3] 贺美芳,周来水,朱延娟,等.基于局部基面参数化的点云数据边界自动提取[J].机械科学与技术,2004,23(8):912-915.
[4] 贺美芳,周来水,神会存,等.散乱点云数据的曲率估算及应用[J].南京航空航天大学学报,2005,37(4):515-519.
[5] 朱心雄.自由曲线曲面造型技术[M].北京:科学出版社,2000.
[6] 胡 鑫,习俊通,金 烨.基于图像法的点云数据边界自动提取[J].上海交通大学学报,2002,36(8):1118-1120.
[7] 孙殿柱,范志先,李延瑞,等.散乱数据点云边界特征自动提取算法[J].华中科技大学学报(自然科学版),2008,36(8):82-84.
[8] 孙龙祥,程义民,王以孝,等.深度图像分析[M].北京:电子工业出版社,1996.
[9] 孙晓兰,赵惠洁,祝世平.基于深度图像的边缘检测方法研究[C]//2004全国光学与光电子学学术研讨会、2005全国光学与光电子学学术研讨会、广西光学学会成立20周年年会论文集.
[10] Steder B,Rusu R B,Konolige K,et al.Point feature extraction on 3D range scans taking into account object boundaries[C]//2011 IEEE International Conference on Robotics and Automation(ICRA),Shanghai,2011:2601-2608.
猜你喜欢
测绘学报(2021年11期)2021-12-09 03:13:12
激光技术(2021年5期)2021-08-17 03:36:02
吉林大学学报(理学版)(2020年3期)2020-05-29 06:32:16
中学生数理化·高一版(2020年1期)2020-02-20 13:24:32
中学生数理化·八年级物理人教版(2018年10期)2018-12-06 09:33:16
自动化学报(2018年7期)2018-08-20 02:59:04
周口师范学院学报(2016年5期)2016-10-17 06:36:47
科普童话·百科探秘(2015年4期)2015-05-14 07:06:42
电脑与电信(2014年6期)2014-03-22 13:21:06
华东理工大学学报(自然科学版)(2014年2期)2014-02-27 13:48:48