日本机器人最新专利摘要选译
2013-02-24 02:45:05
机器人技术与应用 2013年5期
日本机器人最新专利摘要选译
一、【发明名称】作业支援机器人系统
【专利编号】JP 2013-151062 A
【公开日期】2013.8.8
【申请人】丰田汽车东日本株式会社
本发明是有关根据作业流程,将所需要的被加工部件、工具等传递给操作人员的作业支援机器人系统。
【解决手段】作业支援机器人系统由具有传感器的测试部、由测试部得到的数据确定操作人员作业状态的操作人员位置确定部、具有计算和保存作业实施时间概率分布的计算处理兼数据库功能部、基于计算处理兼数据库功能部计算结果确定作业实施时序的时序确定部等组成。
【选择附图】
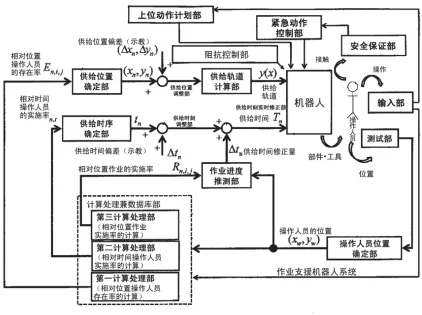
图1 作业支援机器人系统结构框图
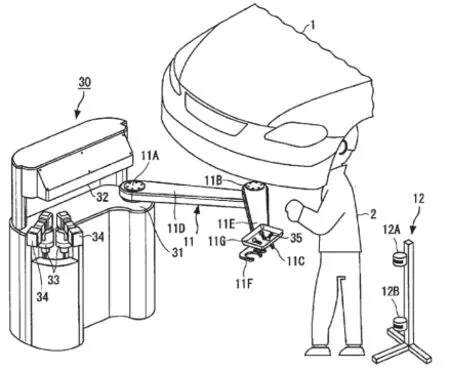
图2 适用作业支援机器人系统工作场面的模式示意图
【图中符号说明】
1:车体
2:操作人员
30:箱体
31:工作台面
32:排出口
33:设置工具用的箱子
34:工具
35:被加工部件
11:机器人机械臂
11A,11B,11C:关节部
11D,11E:机械臂
11F:安装工具用的配件
11G:托盘
12:测试部
12A,12B:传感器
二、【发明名称】起立动作支援机器人
【专利编号】JP 2013-158386 A
【公开日期】2013.8.19
【申请人】富士机械制造株式会社
【摘要】
本发明是有关:在被护理人起立时,帮助被护理人起立的起立动作支援机器人。该机器人能够遵守起立动作的轨道,完成从起点到终点的起立动作。
【解决手段】起立动作支援机器人由支撑被护理人身体的支撑部、支援被护理人起立动作的机器人本体、根据操作人员给定的操作量控制支撑部动作的控制器组成。帮助被护理人起立时,支撑部的轨道是固定的,即使操作人员给控制器输入超出轨道起点和终点的操作量时,支撑部也不会在超出起点和终点的范围移动。
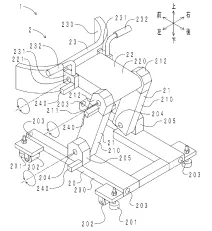
【选择附图】起立动作支援机器人的斜视图
【图中符号说明】
1:起立动作支援机器人
2:机器人本体
20:基座
21:第一机械臂
22:第二机械臂
23:支撑部
200:基座本体
201:分档器
202:车轮
203:接近传感器
204:摇动轴
205:轴承组件
210:机械本体
211:摇动轴
212:轴承组件
220:机械臂本体221:摇动轴
230:支撑部本体
231:轴承架
232:手柄
240:伺服电动机
三、【发明名称】水平多关节机器人
【专利编号】JP 2013-158896 A
【公开日期】2013.8.19
【申请人】爱普森(EPEPSON)株式会社
【摘要】
本发明是有关:能够提供良好装配性和可维修性能的水平多关节机器人。
【解决手段】水平多关节机器人由以下各部件组成,和基座1连接的第1机械臂10、通过第1机械臂10和基座1连接的第2机械臂20、基座1内置使第1机械臂10在水平方向上旋转的第1电动机部件、第2机械臂20内置使第2机械臂20在水平方向上旋转的第2电动机部件、通过第1机械臂10在基座1和第2机械臂20之间传送驱动电源和信号的基座电缆部件62、第1机械臂电缆部件63以及第2机械臂电缆部件61。其各个部件之间的结构能使基座电缆部件62、第1机械臂电缆部件63以及第2机械臂电缆部件61分别和第1机械臂10、基座1和第2机械臂20处于分离状态。
【选择附图】
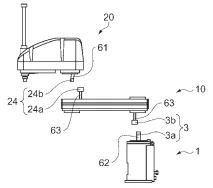
图1 说明布线长度的正面图
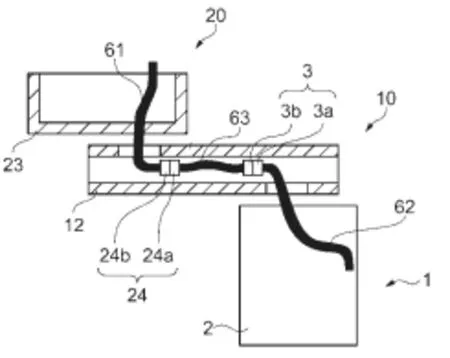
图2 说明布线方法的示意图
【符号说明】
1:基座
2:基座部件
3:第1接插件
10:第1机械臂
12:第1机械臂部件
20:第2机械臂
23:第2机械臂部件
24:第2接插件
61:第2机械臂电缆部件
62:基座电缆部件
63:第1机械臂电缆部件
猜你喜欢
哲学分析(2023年4期)2023-12-21 05:30:27
防爆电机(2021年2期)2021-06-09 08:14:48
中国音乐学(2020年4期)2020-12-25 02:58:06
模具制造(2019年7期)2019-09-25 07:30:00
船舶标准化工程师(2019年4期)2019-07-24 07:21:16
制造技术与机床(2018年9期)2018-09-19 06:48:16
海外华文教育(2017年6期)2017-08-07 03:11:00
水电站机电技术(2016年1期)2016-02-28 14:21:50
文学教育(2016年27期)2016-02-28 02:35:15
振动、测试与诊断(2014年4期)2014-03-01 01:14:08