
无人机遥感影像快速拼接方法研究
2013-01-25 07:19张俊前
城市勘测 2013年5期
张俊前
(重庆市勘测院,重庆 400020)
无人机遥感影像快速拼接方法研究
张俊前*
(重庆市勘测院,重庆 400020)
无人机低空遥感技术作为一种新兴的低空遥感技术,具有灵活性强、操作方便、现势性好、分辨率高、投入低等众多优点,已成为遥感数据获取不可或缺的手段之一。本文针对无人机影像量大、无规律、像幅小、拼接困难的特点,通过试验研究对比了几种无人机低空遥感影像拼接方法,并分析其拼接影像的精度及应用范围。
无人机;遥感影像;影像拼接;正射影像;控制点
1引言
随着社会经济的发展和国防建设的需要,社会各行业对高分辨率遥感影像与基础地理信息的需求越来越迫切,对其现势性要求越来越高。仅靠卫星和载人航空飞机获取的遥感数据难以完全满足影像数据获取和处理的需要。相对于传统航空航天遥感技术,无人机低空遥感技术作为一种新兴的低空遥感技术,具有灵活性强、操作方便、现势性好、分辨率高、投入低等众多优点,已成为遥感数据获取不可或缺的手段之一。
无人机获取的遥感影像具有相幅小,数量多的特点[2]。要想获得整个区域的全局信息,必须对无人机遥感影像进行拼接合成。如何将大量、无规律、小像幅的无人机影像进行有效拼接以达到使用目的,是无人机影像处理人员面临的难题。目前,也有不少学者对无人机影像处理技术展开研究,并取得了一定成绩。本文研究对比了几种无人机低空遥感影像拼接的方法,并分析拼接影像的精度及应用范围。
2 影像拼接技术综述
影像拼接技术就是将数张有重叠部分的影像(可能是不同时间、不同视角或者不同传感器获得的)拼成一幅大型的无缝高分辨率影像的技术[4]。影像拼接的方法很多,不同的算法步骤会有一定差异,但大致的过程是相同的。一般来说,影像拼接主要包括以下五步:
(1)影像预处理。包括数字影像处理的基本操作(如去噪、直方图处理等)、建立影像的匹配模板等操作。
(2)影像匹配。就是采用一定的匹配策略,找出待拼接影像中的模板或特征点在参考影像中对应的位置,进而确定两幅影像之间的变换关系。影像配准算法是影像拼接技术的关键。
(3)建立变换模型。根据模板或者影像特征之间的对应关系,计算出数学模型中的各参数值,从而建立两幅影像的数学变换模型。
(4)统一坐标变换。根据建立的数学转换模型,将待拼接影像转换到参考影像的坐标系中,完成统一坐标变换。
(5)融合重构。将带拼接影像的重合区域进行融合得到拼接重构的平滑无缝全景影像。
根据不同的拼接目的、拼接精度和拼接速度的要求,可将无人机低空遥感影像拼接分为有缝快速拼接、全景影像拼接、无控正射影像拼接和有控正射影像拼接4种类型,下文对不同类型的拼接方法进行了分析。
3 无人机低空遥感影像拼接方法
3.1 有缝快速拼接
本文中采用的无人机低空遥感影像有缝快速拼接为Microstation软件二次开发实现,其主体思想是:将无人机航摄时获取的概略POS数据进行坐标转换到测量坐标系,并对影像主点进行展点;以影像主点为定位中心点将影像快速排列以实现快速拼接。拼接效果如图1所示。
有缝快速拼接缺点是影像存在明显接缝,但速度极快,完成200张影像(7 168×5 440像素)的快速拼接只需要 10 min左右;而且这种拼接影像基于POS数据定位,带有坐标信息,可用于无人机航摄影像快速检查、测区简单变化分析、无人机遥感影像外业控制测量底图。
3.2 全景影像拼接
无人机低空遥感影像全景影像拼接是将无人机获取的多张影像组成一个大幅面的全景影像图的方法。
无人机在飞行时由于受到气流等方面的影响,传感器和目标的相对位置不断发生变化,相邻影像的拍摄角度、拍摄尺度并不一致。拼接全景影像通常采用经典的SIFT(Scale Invariant Feature Transform)算法进行影像匹配。通过提取图像的尺度不变特征点,解决了待拼接图像间大的平移、旋转、尺度变化的干扰,实现差异较大的两幅图像之间的特征的匹配,进而通过匹配的多个同名点进行无人机遥感影像的拼接,从而创造出高质量的全景影像。
全景影像制作的思路是先分航线拼接,再进行航线间影像拼接。分航线拼接是通过SIFT匹配对航线的影像进行自动拼接。相邻航带间拼接是在分航线拼接的影像上人工调整匹配控制点拼接,从而将多航线的影像拼接成完整的影像图,最后对部分区域进行匀光匀色修补获得全摄区影像。拼接成果如图2所示。
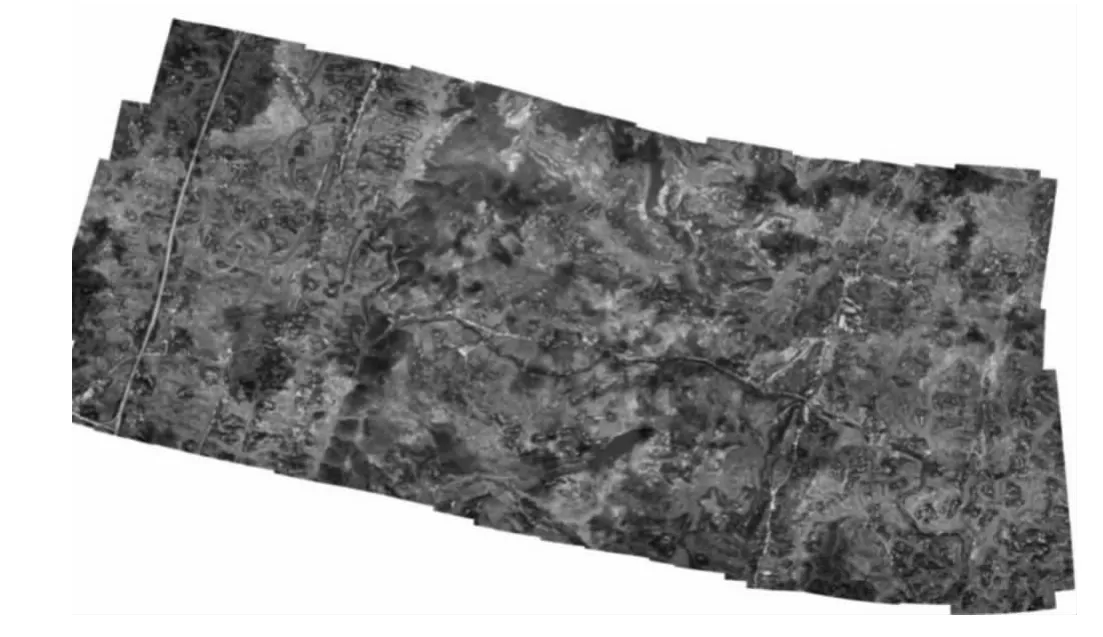
图2 PTGui Pro影像拼接成果
采用此种方法拼接影像的最大优势是航带内可实现快速无缝拼接,并且地物变形小,相对位置关系也较准确,整体拼接速度较快。试验采用PTGui Pro进行,拼接200张影像完成时间在 3 h左右。在高差不大的区域,拼接图可经过影像纠正配准,获取地理坐标。此种影像拼接方法的成果可以应用于突发事件和灾害监测,能快速有效为救援指挥方案提供决策依据。
3.3 无野外控制正射影像拼接
无人机低空遥感系统在航摄时,自带有GPS和IMU组成的POS系统,能获取航摄时无人机的WGS-84坐标和飞行姿态数据。可以将无人机航摄时获取的POS数据作为影像的初始外方位元素,参与空中三角测量的平差,自动生成数字高程模型,再由数字高程模型生成正射影像。流程如图3所示。
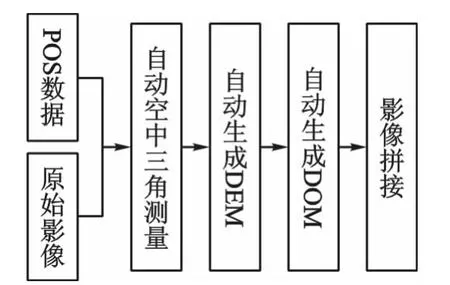
图3 无控制点正射影像制作流程
无人机航摄时获取的POS数据精度不高,因此生成的正射影像经拼接后,需要进行精确配准,才能获取精度较高的坐标。在Map AT中完成200张影像正射影像制作约需要 7 h,制作出的成果如图4所示。

图4 无控制点正射影像拼接
这种影像拼接方法得到的拼接结果精度高,拼接后的影像基本无拼接裂缝和畸变,影像还带有空间坐标信息。但是由于无人机导航数据的POS数据精度不高,因此影像的高程信息精度不高,拼接后的影像经过影像配准和坐标纠正,可获取精度较高的平面坐标。此种拼接方法制作的成果平面精度高,生产周期短,可用于城市和农村的变化检测,也可用于不易进入地区的正射影像生产。
3.4 有野外控制高精度正射影像拼接
随着计算机软硬件技术的发展,集群式无人机影像处理软件(如国内的PixGrid软件和国外的像素工厂等软件)的出现,为利用无人机影像快速制作高分辨率正射影像提供了思路。经试验研究,采用像素工厂软件作为无人机影像处理的主要软件可以大大减少外业控制点数量,其集群式处理器可快速实现影像匹配、DEM自动生成、正射影像自动镶嵌。以平板电脑为硬件平台的数字化像控点测量系统可以省去像片冲洗工序,且可以实现野外快速选刺、测量像控点,如图5所示为正射影像制作流程图。
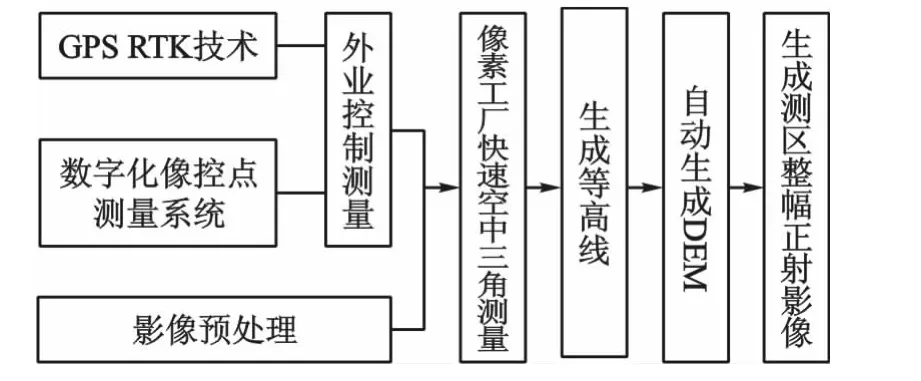
图5 正射影像制作流程
经统计分析,一面积约20 km2的测区,共有13条航线554张无人机影像,外业布设21个控制点,如图5所示的生产流程,经过3个工作日完成了高精度、高分辨率的正射影像制作,成果图如图6所示。经外业设站检查和 1∶500地形图套合检查,共检查51个点,平面最大误差为 0.9 m,中误差 0.46 m。

图6 正射影像与1∶500地形图套合图
此种方法制作的成果精度最高,但是生产周期相对稍长,可用于三维快速建模、高时效性的资源监测、大型工程施工动态监测等方面,为城市建设和规划提供直观有效的测绘保障。
4 结语
无人机低空遥感影像拼接技术是一个复杂的,多学科交叉的处理技术。不同的无人机影像拼接方法采用不同的算法,具有不同的处理流程。本文针对不同的需求和用途,采用不同的平台进行了实验,并给同行一个参考数据。随着无人机POS系统、影像配准算法等关键技术的进步,无人机低空遥感影像拼接技术也将进一步发展。
[1] 王聪华.无人飞行器低空遥感影像数据处理方法[D].济南:山东科技大学,2006,5 ~19.
[2] 柯涛,张永军.SIFT特征算子在低空遥感影像全自动匹配中的应用[J]. 测绘科学,2009,34(4):23~26.
[3] 仵建宁.图像拼接技术研究[D].西安:西安电子科技大学,2006,7 ~10.
[4] 王琳.高精度、高可靠的无人机影像全自动相对定向及模型连接的研究[D].北京:中国测绘科学研究院,2011.
[5] 程远航,薛定宇,韩晓微.基于小波变换的遥感图像快速拼接方法[J].东北大学学报·自然科学版,2008,29(10):1385~1388.
[6] 张永军.无人驾驶飞艇低空遥感影像的几何处理[J].武汉大学学报·信息科学版,2009,34(3):284~288.
The Research of UVA Remote Sensing Image Fast Splicing Method
Zhang Junqian
(Chongqing Survey Institute,Chongqing 400020,China)
UAV low altitude remote sensing technology as a new kind of low-altitude remote sensing technology,a flexible,easy to operate,real-time,high-resolution,low many investment advantages,has become one of the indispensable means of remote sensing data acquisition.For UAV image large,irregular,small range and difficult stitching,this study compared several UAV low altitude remote sensing image stitching methods and analysis of the accuracy and range of application.
UVA;remote sensing image;image mosaic;orthophoto;control point
1672-8262(2013)05-73-03
P237
B
2013—02—06
张俊前(1981—),男,工程师,主要从事摄影测量生产与质量管理工作。
国家科技支撑计划(2011BAH12B07-03)
猜你喜欢
家庭影院技术(2020年11期)2020-12-28
英美文学研究论丛(2018年1期)2018-08-16
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
北京航空航天大学学报(2017年9期)2017-12-18
家庭影院技术(2017年12期)2017-02-06
特别文摘(2016年21期)2016-12-05
南方文学(2016年3期)2016-06-12
中国房地产业(2016年8期)2016-03-01
兵器知识(2016年2期)2016-01-29
遥感信息(2015年3期)2015-12-13