LMS自适应滤波器干扰方法
2012-12-17 10:42张全普邱丽原
电子科技 2012年7期
张全普,邱丽原
(西安电子科技大学电子工程学院,陕西西安 710071)
随着科学技术的发展,雷达系统结构的发展也趋于对外界响应的自适应,其内部结构有越来越多的可变参数器件,主要根据目标对照射信号的响应、外界的电磁环境变化等各种因素,调节自身的结构,实现对目标的最优检测。由于自适应滤波器的输入信号和噪声统计特性在一定情况下可实时变化,系统参数也同时做出相应的动态调整,这种结构上各参数的调整优化可以通过自适应算法得以实现,LMS算法是自适应滤波算法中较为重要的算法。因此有必要寻找这类算法的缺点,研究对其干扰的方式,使之无法实现结构上的自动优化,降低雷达的工作效能。
1 LMS自适应滤波原理和分析
自适应滤波器有两个关键概念,一是收敛后得到稳定的最优解为一个维纳滤波器,二是自适应算法引入负反馈控制结构中可调参数向维纳解不断逼近。维纳滤波器是以最小均方误差为准则的滤波器。其核心为维纳霍夫方程

其中,Φxs是有用信号S和外界混入噪声的有用信号两者之间的互相关矩阵。Φxx是外界输入信号的自相关矩阵。h是滤波器的系数,由式可得滤波器的系数表达式为

典型的基于LMS算法的自适应滤波器结构如图1所示。

图1 自适应滤波器基本结构
LMS滤波器是基于最小均方误差准则的自适应滤波器,输入的含噪信号为Xj,参考信号为dj,两者间的均方误差公式为

通过LMS的算法,进行滤波器权值的迭代计算,不断调整更新

经过一段时间后,最终可得到最优权值的滤波器系数,为一个维纳滤波器,即式(2)。同时均方误差也达到最小状态

其中,W*T为最佳权矢量。
LMS算法主要存在两个缺点:
(1)步长μ固定不变,适应能力有限。自适应滤波理论基于外界干扰信号的统计特性在一段长时间内是平稳的前提条件,即只有在外界干扰是平稳过程的时候,自适应滤波器的各个系数经过若干次迭代运算后才最终收敛于维纳解。自适应滤波器的收敛步长一般决定于外界干扰的统计特性,这表示不同的干扰条件下自适应滤波器对于每个干扰波形都需要合适的步长,有些算法的迭代步长是固定的,如LMS算法,步长一般小于自相关矩阵的最大特征值的倒数。而有些则是变化的,如RLS算法。其参数对一段时间长度内的平稳过程具有良好的适应性,对某些统计特性随时间变化的非平稳过程,自适应算法的统计平稳前提并不成立,也就无法收敛于最优的维纳解。对于LMS这类固定步长的算法而言,自适应滤波器的收敛过程大致可分为3种情况,如图2所示。图2(a)所示为理想情况,步长比较合适,若干次收敛后,实现误差最小。图2(b)所示为步长较小的情况,需要经过较长时间的计算后,均方误差才会逐渐逼近最小。耗时长,系统响应迟钝。图2(c)为步长较大的情况,系统无法收敛。图2(b)和图2(c)这两种情况对于自适应滤波而言效果异不理想,但对于干扰方,却是较为理想的干扰效果。
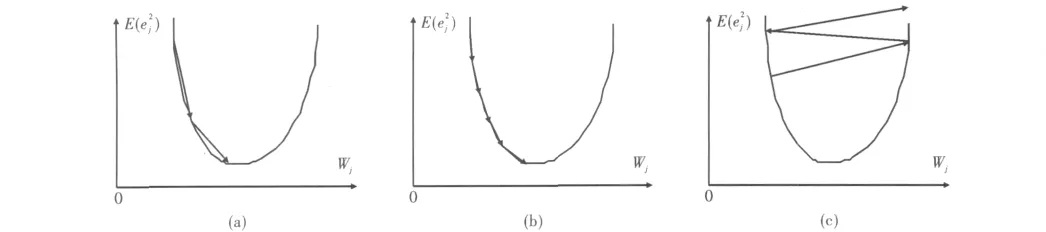
图2 步长μ大小对滤波器收敛的影响
(2)时间上的滞后性,自适应滤波器经过收敛、优化、最终达到最佳的维纳状态这一过程是基于对外界环境的响应不断做出调整,滤波器的反应始终落后于外界环境的变化。这一缺点决定了其对统计特性快速变化的干扰信号适应能力有限。
对于干扰一方而言,可以研究这些缺点,通过相应的干扰信号来破坏自适应滤波器的收敛,这种干扰思路类似于对雷达AGC电路中的通断干扰和角度欺骗的闪烁干扰,将干扰信号设计由两个或多个子干扰信号构成,这些噪声之间交替切换,可实现自适应滤波器收敛过程的不稳定。子干扰信号在时间上排列构成为
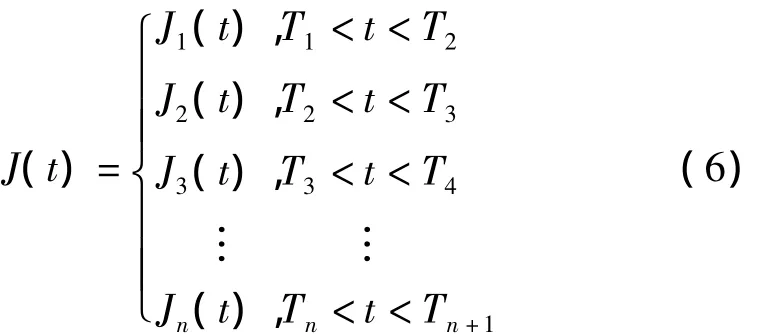
其中,J1(t),J2(t),J3(t),…,Jn(t)为子干扰信号,且n≥2。
针对自适应滤波器工作于平稳的干扰条件下这一前提,则可以增大 J1(t),J2(t),J3(t),…,Jn(t)各子干扰信号的统计特性。使其对应的合适步长差异较大,LMS滤波器在输入由这些干扰组合成的波形时,造成的结果将是收敛慢或者不收敛,难以取合适的步长完成收敛的功能。
2 软件仿真
使用Matlab软件,构建一个2阶的基于LMS算法的自适应滤波器,有用信号为一正弦波

假设无干扰情况下只有噪声信号n(t),n(t)为一均值为0,方差为1的高斯白噪声。假设有干扰情况下,干扰信号J(t)由J1(t)、J2(t)两种子干扰信号构成
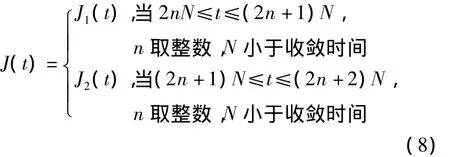
其中,J1(t)、J2(t)为噪声调幅信号 J1(t)=K1U1sin,U为[0,1]的均匀1分布噪声信号。U2是均值为1,方差为1的高斯分布噪声信号。同时为与单一统计特性的高斯白噪声n(t)比较,还需要两子干扰分别乘以常数K1、K2,以满足干扰信号J(t)功率大致等于噪声n(t)。

图3 噪声信号和干扰信号时域波形
在有用信号S(t)中分别混入高斯白噪声和设计的干扰信号,分别送入自适应滤波器,对滤波器的输出时域波形进行分析,从图4中可以观察LMS算法对混入信号中干扰与噪声的滤除效果,并在图5中比对在有、无干扰作用下自适应滤波器的学习曲线。
从图4所示的LMS滤波器输出时域波形上看,高斯白噪声对LMS算法干扰效果不佳,经过自适应滤波器若干次迭代运算的收敛后,噪声逐渐被滤除,原信号逐渐显现。在输入为干扰信号 J(t)的情况下,如图4(b)所示,自适应滤波器只能在其中一种子干扰条件下收敛,而在另一种情况下不收敛,对比图4(d)子图的J1(t)、J2(t)切换时序,可观察滤波器输出随着两种子干扰信号的变化而改变。图4(c)子图显示的是滤波器同时送入高斯白噪声n(t)和干扰J(t)后的输出。两子干扰信号在叠加高斯白噪声后LMS算法均无法收敛。
图5为LMS滤波器在各种输入条件下的学习曲线,从学习曲线上观察,在单一高斯白噪声条件下,均方误差E[e2j]随迭代次数增多而下降,经过300~400次迭代后趋于稳定。在干扰信号 J(t)作用下,如图5(a)所示,均方误差不随迭代次数增多而逐渐减小,而是呈周期性变化,且其平均值较单一高斯噪声下LMS滤波器的均方误差大。将干扰信号J(t)和噪声n(t)叠加后,滤波器的均方误差同样不递减,具体波形见图5(b),均方误差随迭代运算次数增多变化平缓。
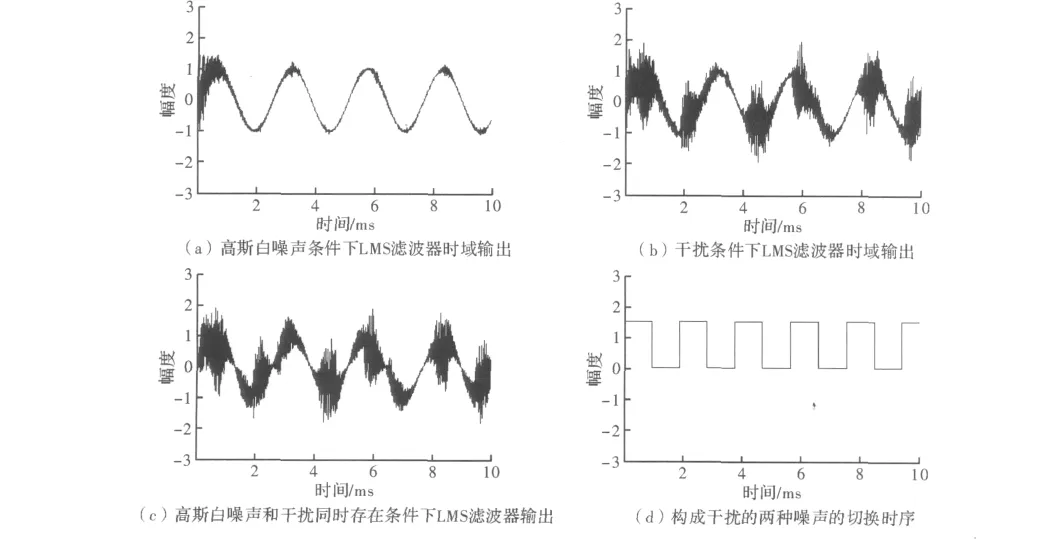
图4 有用信号中混入高斯白噪声、干扰信号、高斯噪声加干扰时LMS滤波器的时域输出对比

图5 输入高斯白噪声、干扰信号,高斯噪声加干扰3种波形时LMS算法学习曲线
3 结束语
自适应滤波器由于对外界的信号具有适应能力,可根据外界输入的统计特性实时更新自身结构以实现最小均方误差滤波,具有一定的抗干扰性能。但也存在诸如依赖于统计平稳信号,收敛性能受制于步长大小,响应的滞后性等缺点。文中针对LMS自适应滤波器的步长适应范围的局限性,使用两种统计特性不同的噪声调幅信号交替工作构成干扰,经过仿真验证,可发现所设计的干扰信号可有效降低了自适应滤波器的收敛效率,实现一定的干扰效果。利用自适应滤波器收敛的滞后性缺点能否设计出干扰波形还有待于进一步研究。
[1]赵国庆.雷达对抗原理[M].西安:西安电子科技大学出版社,1999.
[2]章潜伍.随机信号分析[M].西安:西安电子科技大学出版社,1998.
[3]何振亚.自适应信号处理[M].北京:科学出版社,2002.
[4]Simon Haykin.自适应滤波器原理[M].郑宝玉,译.北京:电子工业出版社,2006.
[5]沈福民.自适应信号处理[M].西安:西安电子科技大学出版社,2001.
[6]FARHANG -BOROUJENY B.Adaptive filter-theory and application[M].New York:John Wiley & Sons,1999.
[7]陆光华,彭学愚,张林让,等.随机信号处理[M].西安:西安电子科技大学出版社,2002.
猜你喜欢
计算技术与自动化(2022年2期)2022-07-04
成都信息工程大学学报(2021年5期)2021-12-30
科技风(2021年19期)2021-09-07
今日中国·法文版(2020年7期)2020-07-04
通信电源技术(2020年22期)2020-03-27
系统工程与电子技术(2016年4期)2016-08-24
工业设计(2016年6期)2016-04-17
电力建设(2015年2期)2015-07-12
河北科技大学学报(2015年5期)2015-03-11
海军航空大学学报(2015年4期)2015-02-27