地铁浮置板轨道垂向振动半主动控制与仿真
2012-12-14 01:36何莉敏郑太雄陈柯龙
重庆邮电大学学报(自然科学版) 2012年3期
李 锐,何莉敏,赵 颖,郑太雄,陈柯龙
(1.重庆邮电大学汽车电子与嵌入式系统研究所,重庆400065;2.重庆市城市建设档案馆,重庆,400015)
0 引言
在地铁列车运行中,车轮与钢轨之间不可避免地产生撞击等振动,而这些振动传递到基础及地面会诱发邻近建筑物的二次振动和噪声,对地铁沿线建筑物的结构安全、居民工作生活产生不良影响[1]。目前,国内外学者在地铁轨道隔减振方面做了许多有价值的研究,效果最好的是采用浮置板式整体道床振动隔离方式[2]。但是,基于橡胶、钢弹簧等被动隔减振器件的浮置板轨道结构无法根据轨道上各点激振频率、载荷实时调节器件的阻尼/刚度,因此很难在更宽频范围内获得优良的隔减振能力;尤其是对小于20 Hz或10 Hz的低频振动,被动隔减振基本上是束手无策的,而这些低频振动波却会给人体、实验室及诸多仪器设备造成影响甚至带来危害[3-4]。
目前,基于可调阻尼的地铁轨道半主动隔减振器件及其控制方法虽然还未见国内外文献公开报道,但这是今后发展的一个必然方向。论文采用近年出现的可控阻尼磁流变(magneto-rheological,MR)液减振器件,探索通过对减振器阻尼的实时控制,改变轨道减振系统的阻尼,隔离或减少轨道振动能量的传递,弥补轨道被动隔离减振器对低频振动抑制的不足,探索地铁轨道振动控制新途径。
由于地铁列车是一个移动振源,在轨道上会产生宽频、多方向耦合振动,而其中垂向振动荷载对轨道结构的影响是最主要的[5]。因此,本文将针对地铁浮置板轨道(floating sbab track,FST)最主要的垂向振动问题,采用可控阻尼磁流变减振器,寻求合适的轨道振动半主动控制器设计方法并开展仿真实验研究。
1 基于磁流变减振器的地铁浮置板轨道垂向振动力学模型
1.1 磁流变减振器特性
磁流变减振器是利用磁流变液流变特性可控而设计的一种新型的结构半主动控制装置,工作时控制其驱动电流,可以改变减振器线圈产生的磁场强弱,影响磁流变液的粘度从而改变减振器的阻尼[6],具有阻尼力大小可控、体积小、响应快的优点。磁流变减振器主要分为阀式、剪切式、剪切阀式和挤压流动式等,响应时间仅为几毫秒,易于连续可控,具有传统减振器不可比拟的优点。由于地铁浮置板轨道振动位移为毫米级,需要调节的阻尼范围较大,这里采用基于挤压模式的磁流变减振器。
为了获得磁流变减振器的驱动电流与输出阻尼的关系,在机台架上对自制的磁流变减振器进行了性能测试,激励频率f取0~100 Hz,驱动电流I取0~1 A。根据不同激励频率和电流下的阻尼实验数据拟合出在整个激励频率变化范围内,相应电流的磁流变减振器的阻尼特性,可用表达式(1)表示。

(1)式中:CMR为阻尼值;a,b,ρ,d为常系数。特别地,当电流I=0时,代表了该类磁流变减振器工作于被动减振方式。
实际工作中,当磁流变减振器的活塞运动频率已知时,可根据(1)式调整驱动电流,以改变磁场强度,使得减振器阻尼可控。
1.2 地铁浮置板轨道垂向振动动力学模型
浮置板采用减振器垂直布置的方式,地基看作是无限大质量的刚体,从轨道的角度考虑振动,对于占线路维修很大部分的整修小坑和总捣固来说,其垂直振动的影响最大[5]。根据英国铁路技术中心多年来大量的理论研究和实验工作表明,产生垂向轮轨激励力的主要原因是由各种不平顺及轮周局部扁瘢等造成。实验还表明,垂向轮轨主要表现在3段激励频率:①低频(0.5~20 Hz),几乎由车体对悬吊部分的相对运动所产生;②中频(30~60 Hz),是由簧下轮对质量对钢轨的回弹作用而产生;③高频(100~400 Hz),由于钢轨的运动受到轮轨接触面的抵抗而产生[7]。
激励力是通过钢轨传递到浮置板再传递下去,可以用一个简单的、能够反映其周期特点的激振形式的力来表达。本研究采用谐振分析的理论,把激励简化成形式为单频周期性点荷载[7],如(2)式。

(2)式中:F(t)为垂向激励力;Ff为幅值,大小为列车轮载的力幅,单轮载是由5根轨枕共同承担的[8],轨枕间距一般为52~62 cm;fi为频率,由于在列车振动荷载的3个频段中,低频和中频分量将通过轨道传递至地基,高频振动则被钢轨自身吸收,对结构影响不大[9],所以,fi可取0~100 Hz间连续变化。
本文以地铁轨道单层减振系统为研究对象,仅考虑对轨道结构影响最重要的垂直方向振动的隔离,将系统简化为隔振系统动力学模型,如图1所示。图1中,激励力F(t)沿垂直方向Z作用于浮置板;c1,c2,c3,c4分别为 4 个磁流变减振器的阻尼值;k1,k2,k3,k4分别为4个减振器的刚度值。
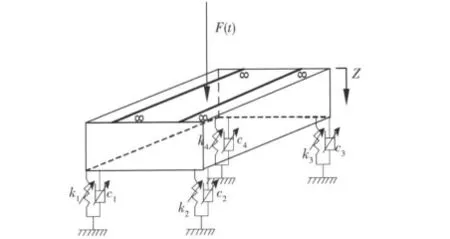
图1 地铁轨道垂向振动模型Fig.1 Metro vertical vibration model
由拉格朗日方程,可以推得单自由度的轨道结构垂向振动系统动力学方程为
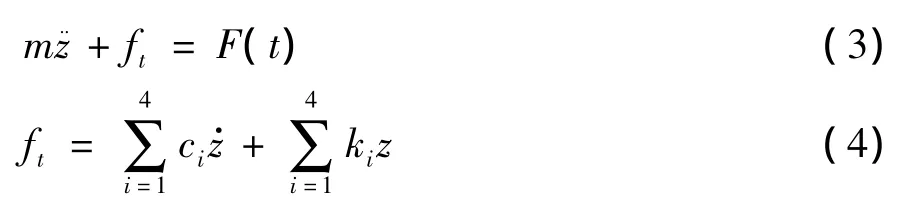
(3)-(4)式中:m是由钢轨、浮置板等参振质量组成集中质量;z为浮置板质心垂向位移;z·为浮置板振动速度;z¨为浮置板振动加速度;ft为通过减振器传递到地基的传递力合力;ci,ki分别是减振器等效阻尼系数和等效刚度系数,由于磁流变减振器在动力装置低频振动隔离领域中已经有很好的运用[6],在这里考虑用它代替传统的被动(橡胶、钢弹簧)减振器,运用到浮置板轨道结构中来,当ci可控时,表示采用磁流变减振器,当ci不可控时,表示采用被动钢弹簧减振器。
2 地铁浮置板轨道垂向振动模糊控制
半主动控制的任务是在一定激振条件下,通过抑制地铁列车运行时浮置板垂向振动能量来减小列车激励力通过浮置板、减振器传递到地基的传递力,使得其振动能量对地基的影响达到最小。由于建立的地铁轨道垂向振动模型和磁流变减振器特性关系只是一个近似模型,难以精确反映轨道垂向振动的复杂特性,而模糊控制不需要被控对象的精确数学模型,其控制灵活性强。因此,这里研究如何设计基于磁流变减振器的地铁轨道垂向振动模糊控制器。
轨道结构的振动主要是通过浮置板向外传播,因此有必要根据浮置板振动速度来控制磁流变减振器阻尼值,减小力的绝对传递率并使得浮置板向外传播的振动能量得以抑制,达到减振目的。因此定义系统误差为e=v-v0,因为在地铁未通过时,浮置板是静止不动的,即v0=0,则系统误差为e=v;误差的变化率为˙e=˙v。选取系统误差e和误差变化率˙e作为模糊控制器的输入变量,阻尼值c作为输出变量。地铁浮置板轨道垂向振动模糊控制系统如图2所示。
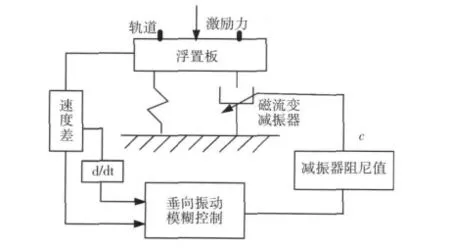
图2 地铁浮置板轨道垂向振动模糊控制Fig.2 Fuzzy control of the metro FST vertical vibration
根据文献[10]选取输入浮置板振动速度v即系统误差e的模糊集合论域为[-0.2 m/s,0.2 m/s],误差变化率˙e的模糊集合论域为[-10 m/s2,10 m/s2],控制器的输入语言变量取NB(负大),NM(负中),ZE(零),PM(正中),PB(正大)5个模糊子集;磁流变减振器阻尼值基本论域为[40 KN·s/m,80 KN·s/m],输出语言变量取 ZE(零),PS(正小),PM(正中),PB(正大)4个模糊子集。
以实践经验和理论分析建立模糊控制规则,目的是尽快使轨道结构的振动速度减小,使其接近为零。当浮置板的振动速度误差和加速度正向最大(见图1,取垂直向下为正)时,只有阻尼达到最大值,才能尽快使浮置板的振动速度为零。同理当浮置板的振动速度误差和加速度负向最大,阻尼取最大值。阻尼器的阻尼值能够随浮置板速度差及其变化率的变化而变化,这样才能使地铁浮置板轨道的减振达到最佳状态。建立了求解阻尼的模糊控制规则,如表1所示。
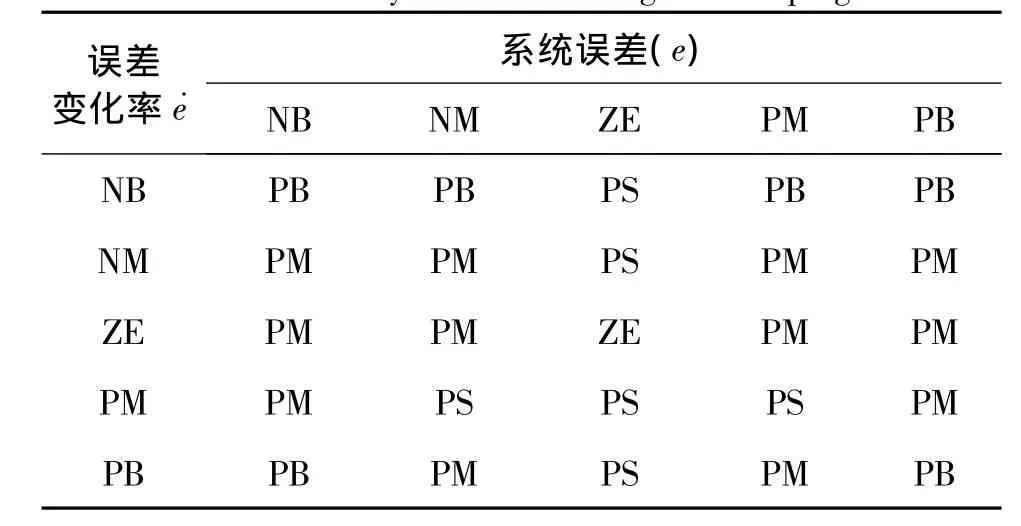
表1 求解阻尼的模糊控制规则Tab.1 Fuzzy rules for solving the damping
模糊推理采用MAMDANI法,

(5)式中:Rl为各条模糊规则;Rei为某系统误差对应的规则;R˙ek为某误差变化率对应的规则。
若输入为en和m,则输出O为

采用Min-Max重心法反模糊化,得到模糊控制器输出的精确量:

(7)式中:μOj为各输出模糊子集获得的权重。
最后,取c为模糊控制器的输出,使其控制磁流变减振器阻尼值。设磁流变减振器活塞运动的频率f近似为地铁激励频率,在f和c已知的情况下,可根据(1)式,反解出磁流变减振器的驱动电流为

3 地铁浮置板轨道垂向振动仿真实验
3.1 仿真条件
使用MATLAB中的simulink仿真软件,在(2)-(4)式的基础上,建立了基于钢弹簧减振器和磁流变减振器的浮置板轨道结构减振仿真平台,主要参数如表2所示。其中,钢弹簧浮置板属于被动减振,钢弹簧支座的阻尼值一定,磁流变减振器可以由输入电流产生可控阻尼特性;根据2.2节中提到的单轮载由5根轨枕共同承担和轨枕的间距,仿真时浮置板长度取3 m,钢轨质量为60 kg/m,浮置板质量4 000 kg/m,仿真参振质量为其等效质量。
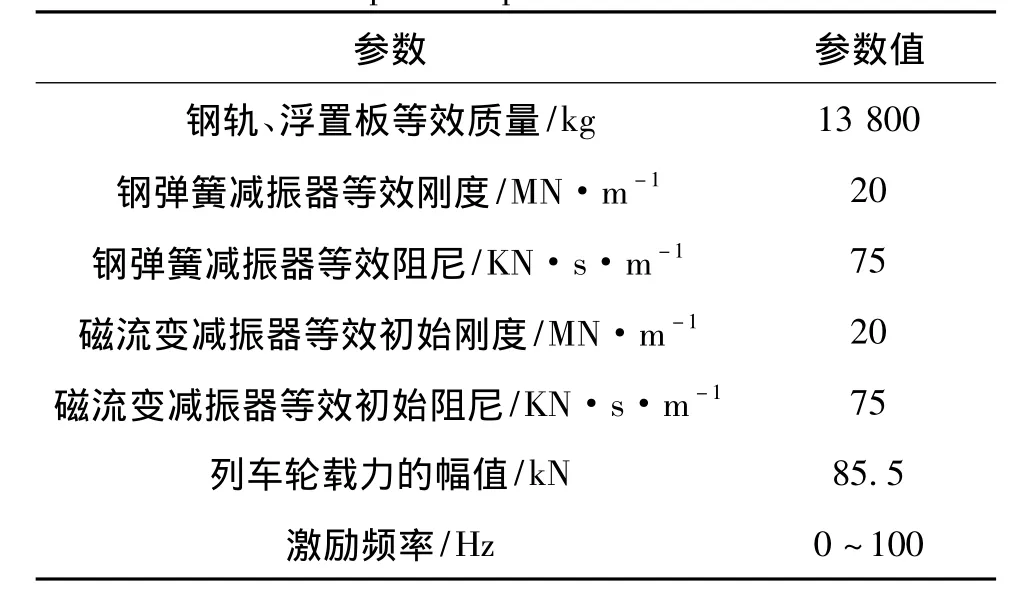
表2 地铁浮置板轨道减振仿真平台参数Tab.2 Simulink platform parameters for the metro FST
天棚(Skyhook)阻尼控制策略是一种典型的半主动控制方法,在抑制振动能量上具有简单易行等优点[11]。为了对比地铁轨道垂向振动模糊控制器效果,本文在地铁轨道垂向振动的基础上,采用天棚半主动控制策略来调节磁流变减振器阻尼值,它主要通过抑制浮置板的振动来降低能量传递。
按照前面提出的半主动控制策略,分别仿真设计了可控阻尼的地铁轨道垂向模糊控制和天棚控制器,仿真时间为0.6 s,激励频率为0~100 Hz,并重点在典型的16 Hz(较低频)和40 Hz(中频)的激励频率下,对地铁轨道垂向不同减振器,不同控制方法的减振效果进行了对比分析。
3.2 仿真结果及分析
用不同的减振器构成了浮置板轨道单层垂向减振系统后,采用相同的激励力,获得各个减振器下地基受力和浮置板的振动速度,用其来研究系统的减振效果;另外,还可以通过减振器下地基的受力和激励力来算出力的绝对传递率Tf,而力的绝对传递率又是反映减振效果的最重要的指标[12]。
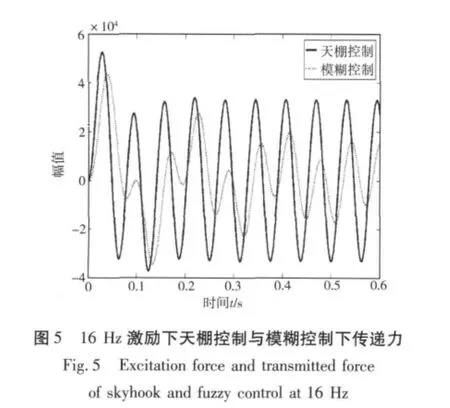
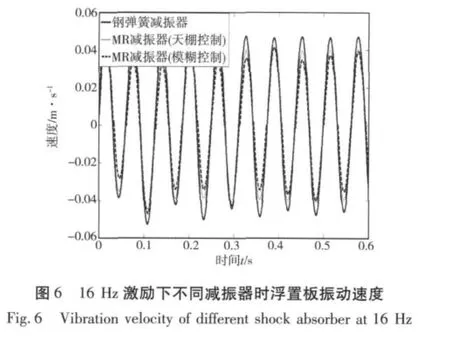
图3、图4给出了钢弹簧和磁流变减振器浮置板轨道在激励频率为16 Hz和40 Hz下激励力、地基受力对比。图5给出了在激励频率为16 Hz下的天棚控制和模糊控制的效果对比。图6给出激励频率为16 Hz下的浮置板的振动速度。图7给出了Tf随激励频率变化而改变的情况。
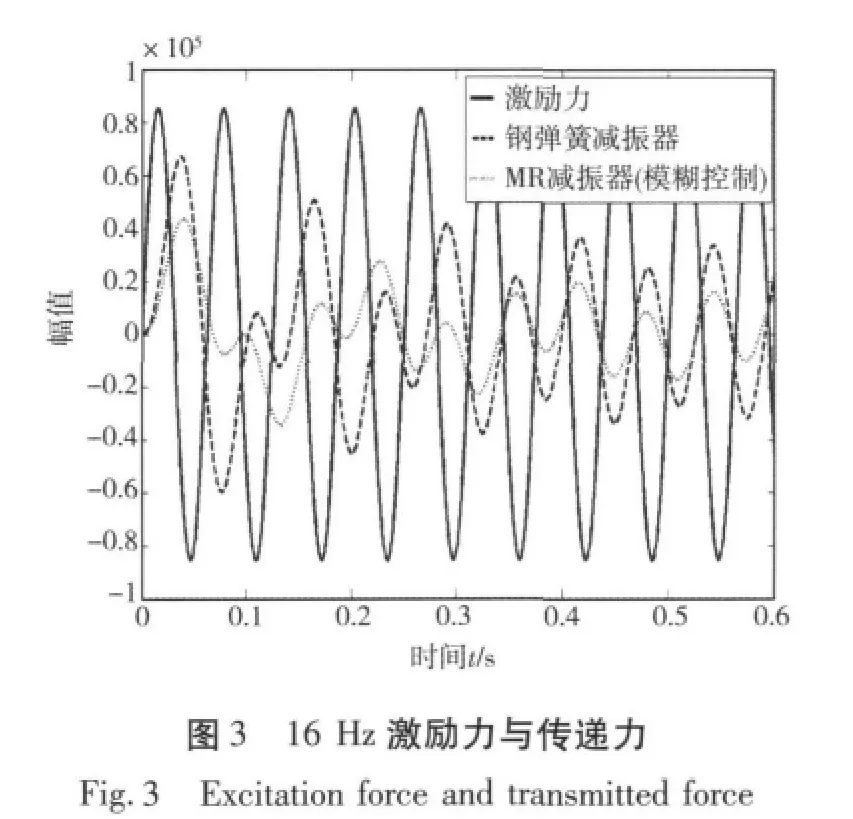
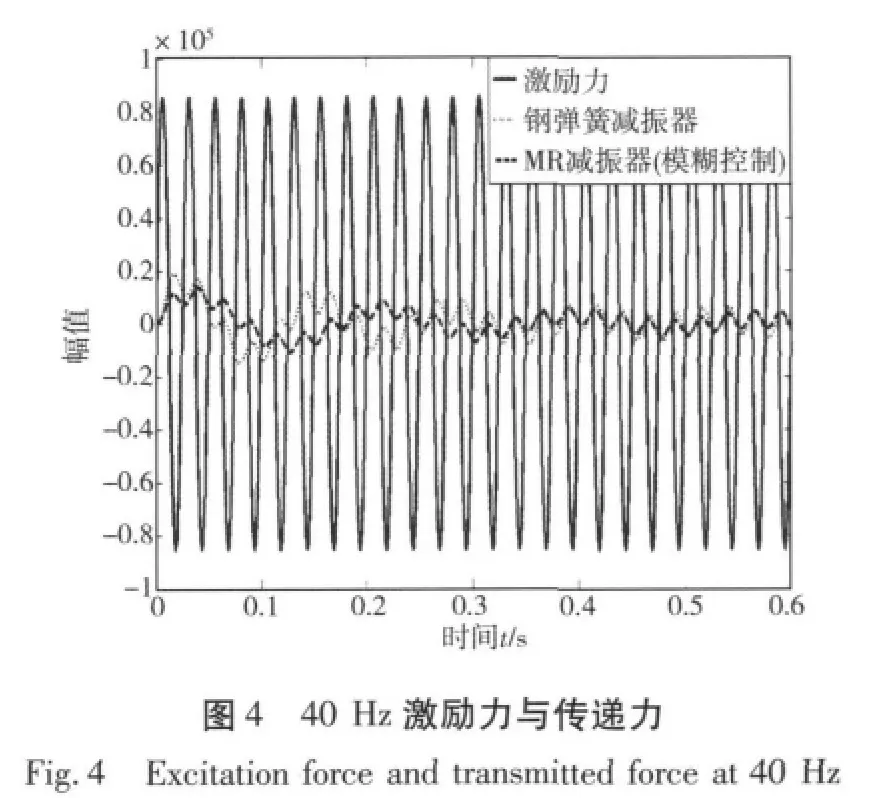
由图3、图5的数据可知,在激励频率为16 Hz时,钢弹簧减振器、基于天棚控制和模糊控制的磁流变减振器的力绝对传递率Tf约分别为0.79,0.61,0.51;由图4的数据可计算出在激励频率为40 Hz时,钢弹簧减振器、模糊控制的磁流变减振器的Tf分别约为0.22,0.16;由图6的数据计算出采用钢弹簧、基于天棚控制和模糊控制的磁流变减振器时,浮置板振动速度的均方根值(RMS)分别为1.7,1.5,1.4 mm/s;图7的垂向力传递率在8 Hz附近出现了峰值,可认为是隔振系统的固有频率点,符合隔振理论[11],而在8 Hz以外的频率下采用模糊控制和天棚控制的磁流变减振器在中低频有更低的传递率,高频减振效果和钢弹簧相当;图6、图7表明,采用模糊控制或天棚控制的磁流变减振器都取得了较低的速度均方根值和垂向力的传递率,其中兼顾了浮置板振动速度和加速度的磁流变减振模糊控制效果优于仅通过抑制浮置板振动速度来减振的天棚控制。
4 结论
①仿真结果表明,可控阻尼的磁流变减振器,其抑制地铁轨道垂向振动的能力在较低频(16 Hz)下较钢弹簧提高18%~28%,在中频(40 Hz)下其减振效果较钢弹簧提高5%~6%,这表明相对于钢弹簧,磁流变减振器能够在更宽的低频范围获得优良的减振能力,说明阻尼可控的磁流变减振器在轨道浮置板的较低频振动半主动隔离上具有研究价值。
②仿真可知,通过抑制浮置板垂向振动来降低激振力能量向地基传递的方法是可行的,且兼顾了浮置板振动速度和加速度的模糊控制,优于仅通过抑制浮置板振动速度来减振的天棚控制。
③基于磁流变减振器的地铁轨道垂向减振半主动控制与仿真对以后的台架试验研究具有指导意义。
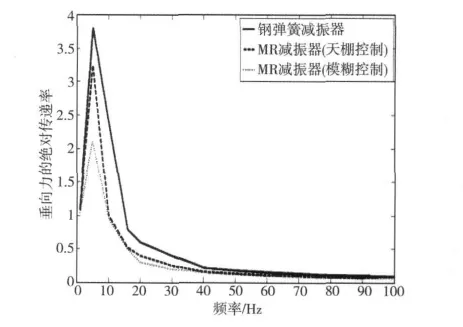
图7 钢弹簧、MR减振器的垂向力传递率Fig.7 Vertical force transfer rate of steel spring、MR shock absorber
[1]SHENG X,JONES C J C,THOMPSON D J.A theoretical study on the influence of the track on train-induced ground vibration[J].Journal of Sound and Vibration,2004,272(3):909-936.
[2]GEORGE P W.Rail system noise and vibration control[C]//Proceedings of acoustics 2004,Gold Coast,Australia:Trans Tech Publications,2004:3-5.
[3]SAURENMAN H,PHILLIPS J.In-service tests of the effectiveness of vibration control measurers[J].Journal of Sound and Vibration,2006,293:888-900.
[4]马蒙,刘伟宁,丁德云.地铁列车引起的振动对西安钟楼的影响[J].北京交通大学学报,2010,34(4):88-92.MA Meng,LIU Wei-nin,DING De-yun.Influence of Metro Train-Induced Vibration on Xi'an Bell Tower[J].Journal of Beijing Jiao tong University,2010,34(4):88-92.
[5]郭宏伟,王琼.地铁列车荷载作用下隧道的静动力响应分析[J].山西建筑,2011,37(7):183-184.GUO Hong-wei,WANG Qiong.Analysis on static and dynamic response under subway metro train load[J].Shanxi Architecture,2011,37(7):183-184.
[6]ZHANG H H,LIAO C R,YU M.A study of an inner bypass magneto-rheological damper with magnetic bias[J].Smart Materials and Strucures,2007,16:40-46.
[7]潘昌实,PANDE G N.黄土隧道列车动荷载响应有限元初步数定分析研究[J].土木工程学报,1984,17(4):19-28.PAN Chang-shi,PANDE G N.Preliminary finite element study on a tunnel driven in loss subjected to train loading[J].China Civil Engineering Journal,1984,17(4):19-28.
[8]王其昌.高速铁路土木工程[M].成都:西南交通大学出版社,2000:301-312.WANG Qi-chang.High speed railway civil engineering[M].Chengdu:Southwest jiaotong university press,2000:301-312.
[9]张玉娥,白宝鸿.地铁列车振动对隧道结构激振荷载的模拟[J].振动与冲击,2000,19(3):68-70.ZHANG Yu-e,BAI Bao-hong.The analog of subway train vibration on the tunnel structure vibration load[J].Journal of Vibration and Shock,2000,19(3):68-70.
[10]孙晓静.地铁列车振动对环境影响的预测研究及减振措施分析[D].北京:北京交通大学,2008.SUN Xiao-jing.Prediction of Environment Vibrations Induced by Metro Trains and Mitigation Measures Analysis[D].Beijing:Beijing jiaotong University,2008.
[11]GARDONIO P,GAVAGNI M,BAGOLINI A.Seismic Velocity Sensor With an Internal Sky-Hook Damping Feedback Loop[J].Sensors Journal,IEEE.2008,8(11):1776-1784.
[12]朱石坚,楼京俊.振动理论与隔振技术[M].北京:国防工业出版社,2006.ZHU Shi-jian,LOU Jing-jun.Vibration Theory and Vibration Isolation[M].Beijing:Defense Industry Press,2006.
猜你喜欢
建筑热能通风空调(2021年11期)2021-12-26
军民两用技术与产品(2021年1期)2021-07-28
铁道通信信号(2020年6期)2020-09-21
振动与冲击(2018年19期)2018-10-20
中国照明(2016年5期)2016-06-15
现代城市轨道交通(2015年5期)2015-06-26
噪声与振动控制(2015年4期)2015-01-01
汽车科技(2014年6期)2014-03-11
振动、测试与诊断(2014年6期)2014-03-01
振动、测试与诊断(2014年1期)2014-03-01