
喀斯特高原山区无人机低空遥感影像数据的获取与处理
2012-12-11 06:08:40邹长慧周忠发
测绘通报 2012年1期
邹长慧,周忠发
(1.贵州师范大学中国南方喀斯特研究院,贵州贵阳550001;2.贵州省喀斯特山地生态环境国家重点实验室培育基地,贵州贵阳550001)
一、引 言
贵州处于中国西南喀斯特的腹心地带,地处亚热带地区,属岩溶化的高原山区,喀斯特面积达10.91 km2,占全省面积土地面积的73.8%,受亚热带季风气候的影响,降水多且集中于夏季,境内各地阴天日数一般超过150天,常年相对湿度在70%以上,是一个兼具喀斯特地貌和多云雨季风气候的特殊地区,因此该区获取优质的高时间、空间分辨率卫星遥感数据十分困难[1]。无人机低空航拍遥感系统作为一项空间数据获取的重要手段,具有成本低、机动灵活、续航时间长、影像实时传输、高危地区探测等特点,是获取高分辨率遥感数据的重要工具之一。近年来,无人机遥感监测技术发展迅速,成为国内外研究开发的热点,逐步应用到社会各领域。但是在高分辨率影像资料获取十分困难的贵州高原山区,无人机低空航拍遥感系统的相关研究却显得十分薄弱。在贵州喀斯特高原山区,就无人机采集影像的方式及影像处理过程进行探讨,建立一套适宜于该区域的无人机航拍相关技术显得尤为迫切与重要。
二、系统组成与作业流程
1.无人机低空航拍遥感系统组成
研究和试验采用的无人机低空航拍遥感系统充分考虑了喀斯特高原山区特殊生态环境因素,该系统主要由无人机飞行平台、飞行控制系统、遥感系统、作业软件系统和影像处理软件系统、无线电遥控系统几部分组成(如图1所示)。其主要性能指标如下:最大飞行高度为海拔4500 m,最大海平面爬升率5 m/s,巡航空速为115 km/h,最大过载为3.5 G,续航时间为 1.8 h,巡航抗风能力 13 m/s,起降抗风能力为5级,控制半径100 km。无人机机身为金属、木材、碳纤维和玻璃钢等多种材料制作而成。机身备有独立的电池舱,外形为拉进式三点部局,与机翼连接用碳纤维圆管插接,发动机位于机身前端。体现出质量轻、工业轻度高等特性。无人机起落装置是专为适合贵州喀斯特高原山区恶劣野外作业条件而设计的,它的特点是重量轻、强度大、减振好、拆卸便捷,在安装机轮的情况下可以滑跑降落,在没有起降条件的场地可以充分利用起落架高度来降落,以减少滑行距离[2]。
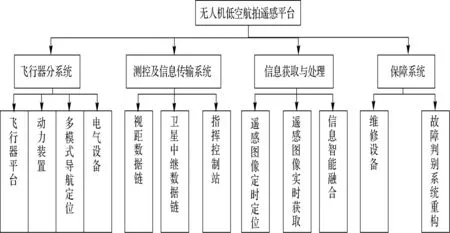
图1 无人机低空航拍遥感平台框图
2.喀斯特高原山区无人机低空航拍作业流程
(1)适航条件分析
在确定航拍任务后,需首先针对航拍区域进行定点勘察,确定航拍区域范围,并充分收集航拍区域的有关地形图、影像等资料数据,了解航拍地区的地形地貌、气候条件及附近有无重要设施(如机场、国家重大基础设施、军事管理区等),并进行分析研究,确定航拍区域的飞行条件,以便制定翔实的航拍实施方案。航拍前需确定地面分辨率,并根据喀斯特高原山区特殊的地形地貌不断调整设计合适的航线重叠率。
(2)起降场地选择
因为贵州喀斯特高原山区特殊的地形地貌,起飞和降落场地一般选择在同一场地,以便于发生紧急情况时沟通、协调,起降场地周围不能有电信等大功率无线电发射设备,以避免影响无人机遥控器和地面监控站通信。起飞降落场地需要选在地面平坦、开阔的区域,并且降落方向要求200 m以内基本无突出障碍物、高压电线、高大树木以及无线电设施,以避免与无人机发生相撞事故,如果有风,选择逆风起降,起降跑道长度一般要求在150 m以上,且需笔直平整,如果实在找不到平坦开阔的降落场地,可以充分利用无人机本身的起落架高度,考虑在航拍区域内较为平坦、开阔的稻田等农用地降落。
(3)传感器参数定位
试验用无人机传感器采用目前国内无人机航拍使用最为频繁的Canon EOS 5D MarkⅡ(36 mm×24mm)数码单反高分辨率相机,其主要参数为:传感器类型为CMOS,快门速度为1/8000 s,像素为5616×3744,像元大小6.41 um,最大有效像素2110万。由于相机的精准检校对于航拍影像加工意义重大,航拍时采用的相机均实行了严格的相机检校制度和使用制度,以保证无人机遥感影像数据的加工精度,由于相机检校工作的专业性和特殊性,检校工作委托专业相机检校机构协助完成。
(4)飞行参数设置
航拍试验采用专业设置的航线规划软件进行航线规划设计,航线规划充分考虑贵州山区地形特点,天气条件,设计合理的拐弯半径与飞行速度,利用地面控制系统软件在无人机飞行前进行任务航路规划,在无人机飞行过程中显示飞行区域的电子地图、航迹、飞行参数、飞机的姿态航向参数。飞行中所有飞行参数和导航数据可实时下传并记录。操作者可通过航迹规划和路径调整进行各种任务的控制执行。地面控制系统的人机界面让操作者可方便的修改航路点、目标航向并监视飞行状态。
(5)无人机飞行操作
在经过上述步骤准备后,接着由无人机操控手与地面站工作人员共同完成无人机的飞行。操控手负责无人机的起飞与降落,在无人机起飞至300 m高空,飞行姿态平稳时,切换至无人机自驾模式,由地面站工作人员负责按预先规划航线飞行,进入规划航线切入点,发送指令开始按规划航线进行飞行航拍。当完成航线飞行后,利用预设航线控制无人机盘旋逐步降高至300 m高空时,切换至由无人机操控手利用遥感器进行控制,并将无人机逆风降落在预定降落场地,至此航拍工作完成(如图2所示)。

图2 航拍影像数据处理流程图
三、无人机遥感影像数据与处理
采用上述无人机作业流程,于2010年9月到2011年10月间,针对贵州喀斯特高原山区日益严重的石漠化问题,针对不同地形地貌,对石漠化严重地区及石漠化综合治理区进行了多次航拍试验,获取了贵州大方县桶井示范区、贵州石阡县汤山镇、贵州三都水族自治县三合镇、贵州省平塘县平湖镇的数千张遥感影像数据,并对影像进行了后期处理。
上述影像处理主要依据航拍照任务完成后的航片资料、相机检校参数文件和像控文件等外业成果进行相对定向、利用外控纠正提高精度、绝对定向等工作,生成DEM、DOM正射影像,然后将影像拼接、调色。其具体流程为:首先获取航飞的原始相片、相机参数、像控资料,并检查这些数据是否满足相应要求。接着根据具体飞行任务建立具体的航拍飞行数据处理工程,并将航拍时传感器参数输入,将其转换为影像处理流程中所需要的数据格式,利用MAPAT专业航摄处理软件剔除粗差,得到较准确的空三结果,并加入外业像控,检验并提高DEM、DOM的精度,然后进行绝对定向平差,将整个航拍区域统一到地面坐标系内。最后将影像纠正生成正射影像,进行拼接、调色、分幅,生成高分辨率的影像产品[3-4](如图3、图4所示)。

图3 生成的正射影像图(石漠化现状调查区)

图4 生成的正射影像图(石漠化综合治理区)
四、航摄质量分析
无人机低空遥感影像获取方式是基于自动定点拍摄和遥感影像实时下传的,得到的数据是否满足航摄测量要求,与无人机航拍时的航向重叠率、旁向重叠率、航线弯曲度、像片旋偏角以及航高差密切相关。按照航空遥感的一般要求,航带弯曲度不超过3%,像片旋偏角小于6°,拍摄时的航向重叠率为60%,最小不得小于 53%,旁向重叠率为30%,最小不得小于15%。在贵州喀斯特山区进行的4次试验飞行中,考虑到该区的天气因素及无人机性能指标因素对航拍图片拼接的影响,设计了航向重叠率为75%,旁向重叠率为45%[5-6],航拍时航带弯曲度最大值只有1.195,像片旋偏角都在5°以内,试验飞行时的航高差均未超过15 m,飞行平稳度较高,试验证明这一设定比较适合贵州高原山区的航拍作业,基于这一设定条件下拍摄的影像经检验,其航带直线型、像片的重叠度与旋偏角以及航高差均能满足摄影测量要求与影像质量要求。通过多次试验飞行,在相机焦距为24mm,假设航线数为2,每条航线数照片为8张的情况下,对无人机航拍时的作业高度与影像质量关系作了进一步探讨,其关系如表1所示。

表1 无人机作业高度与影像质量关系表
五、结 论
通过几次在贵州喀斯特高原山区不同地形地貌的试验飞行,总结了一些无人机遥感平台在该区应用中存在的问题,并提出了一些解决方法。
1)以贵州为典型代表的喀斯特高原山区,山高谷深、沟壑纵横、地形起伏较大,且多云雾天气,常规的航空摄影很难开展航拍工作,试验结果表明,无人机低空遥感系统系统将是该区域获取高分辨率影像的最为有效的方式与手段,必将成为喀斯特高原山区对地观测体系中不可或缺的重要组成部分。
2)贵州喀斯特高原山区很难找到理想的起降场地,具有弹射起飞和伞降功能的无人机遥感平台将是首选,由于该区地形起伏高差太大,当需要分次分区拍摄时,宜采用空中改变航高与地面监测站高度的方法,以减低无人机起降带来的风险。
3)要使无人机在贵州喀斯特高原山区成为理想的遥感平台,遥感传感器技术应根据不同类型的遥感任务,致力开发更多相应的机载遥感设备,多光谱成像仪、激光扫描仪、磁测仪、合成孔径雷达等,选用的遥感传感器应具备数字化、体积小、重量轻、精度高、存储量大、性能优异等特点。
4)4次试验飞行所采用的无人机遥感系统平台、航拍技术以及影像处理流程是切实可行的,可广泛应用于喀斯特高原山区的数字化农业、国土资源调查、生态环境与灾害监测、交通管理、数字化林业等众多领域。
[1]刘梦琦,周忠发,李波.喀斯特高原山区IRS-P6影像最佳融合方法选择研究[J].中国岩溶,2009,28(4):419-425.
[2]邹长慧,谢晓尧,周忠发.无人机低空航拍遥感系统在贵州高原山区的应用前景探讨[J].贵州师范大学学报,2011,29(2):24-28.
[3]杨志华,肖继东,张旭,等.微型无人飞机遥感影像后期处理技术方法研究[J].沙漠与绿洲气象,2008,2(5):49-51.
[4]周晓敏,赵力彬,张新利.低空无人机影像处理技术及方法探讨[J].测绘与空间地理信息,2012,35(2):182-184.
[5]洪宇,龚建华,胡社荣,等.无人机遥感影像获取及后续处理探讨[J].遥感技术与应用,2008,23(4):463-465.
[6]胡开全,张俊前.固定翼无人机低空遥感系统在山地区域影像获取研究[J].北京测绘,2011(3):35-37.
猜你喜欢
中外文摘(2021年10期)2021-05-31 12:10:40
阅读(低年级)(2020年8期)2020-11-06 06:23:19
乡村地理(2019年2期)2019-11-16 08:49:32
————水溶蚀岩石的奇观
家教世界(2019年4期)2019-02-26 13:44:20
小学生优秀作文(低年级)(2018年6期)2018-05-19 01:54:27
北京航空航天大学学报(2017年9期)2017-12-18 07:12:31
作文通讯·高中版(2017年6期)2017-07-10 03:21:34
陕西画报(2017年1期)2017-02-11 05:49:48
南方文学(2016年3期)2016-06-12 13:54:34
中国房地产业(2016年8期)2016-03-01 01:26:16
